ROS:关于tf的探索(3)Adding a frame(Python)
2016-10-14 19:08
483 查看
本教程教你如何给tf添加额外的frame。
在前面的教程中,我们通过添加一个tf broadcaster和一个tf listener来重新创建龟图演示。 本教程将教你如何在tf树中添加一个额外的框架。 这非常类似于创建tf broadcaster,并将显示tf的一些功能。
让我们先创建源文件。 转到我们为上一个教程创建的包:
3.1 The Code
创建 nodes/fixed_tf_broadcaster.py.,插入如下代码
代码可执行
3.2 代码解释
这里我们创建了一个新的变换,该变换为从父级turtle1到子级carrot1的变换,carrot1距离turtle1偏移2米。
打开nodes/ turtle_tf_listener.py文件,并用“/ carrot 1”替换“/ turtle1”:
编辑nodes/fixed_tf_broadcaster.py
在前面的教程中,我们通过添加一个tf broadcaster和一个tf listener来重新创建龟图演示。 本教程将教你如何在tf树中添加一个额外的框架。 这非常类似于创建tf broadcaster,并将显示tf的一些功能。
1.为什么要添加frames
对于许多任务,更容易在局部框架内思考,例如。 更容易推断在激光扫描器中心的框架中的激光扫描。 tf允许您为系统中的每个传感器,连接件等定义本地框架。 并且,tf将处理所引入的所有框架变换。2.在哪里添加frames
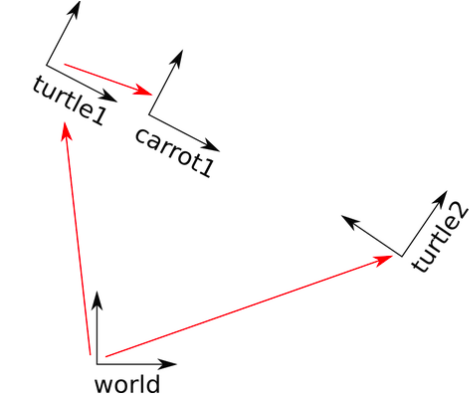
tf建立frames的树结构; 它不允许在frame结构中的闭环。 这意味着一个frame只有一个单亲,但它可以有多个孩子。 目前我们的tf树包含三个frame:world,turtle1和turtle2。 两只乌龟是world的孩子。 如果我们要向tf添加一个新frame,则三个现有frame中的一个需要是父frame,并且新frame将变为子frame。3.如何添加一个frame
在我们的乌龟例子中,我们将添加一个新的frame到第一个乌龟。 这个框架将是第二只乌龟的“carrot”。让我们先创建源文件。 转到我们为上一个教程创建的包:
roscd learning_tf
3.1 The Code
创建 nodes/fixed_tf_broadcaster.py.,插入如下代码
#!/usr/bin/env python
import roslib
roslib.load_manifest('learning_tf')
import rospy
import tf
if __name__ == '__main__':
rospy.init_node('my_tf_broadcaster')
br = tf.TransformBroadcaster()
rate = rospy.Rate(10.0)
while not rospy.is_shutdown():
br.sendTransform((0.0, 2.0, 0.0),
(0.0, 0.0, 0.0, 1.0),
rospy.Time.now(),
"carrot1",
"turtle1")
rate.sleep()代码可执行
chmod +x nodes/fixed_tf_broadcaster.py
3.2 代码解释
br.sendTransform((0.0, 2.0, 0.0), (0.0, 0.0, 0.0, 1.0), rospy.Time.now(), "carrot1", "turtle1")
这里我们创建了一个新的变换,该变换为从父级turtle1到子级carrot1的变换,carrot1距离turtle1偏移2米。
4.运行frame broadcaster
编辑start_demo.launch文件,加入如下代码<launch> ... <node pkg="learning_tf" type="fixed_tf_broadcaster.py" name="broadcaster_fixed" /> </launch>
roslaunch learning_tf start_demo.launch
5.检查结果
因此,如果你驱动第一个乌龟,你注意到,即使我们添加了一个新的frame,行为没有改变从上一个教程。 这是因为添加额外的frame不会影响其他frame,我们的listener仍然使用先前定义的frame。 所以,让我们改变listener的行为。打开nodes/ turtle_tf_listener.py文件,并用“/ carrot 1”替换“/ turtle1”:
(trans,rot) = listener.lookupTransform("/turtle2", "/carrot1", rospy.Time(0))6.发布一个移动的frame
我们在本教程中发布的额外frame是一个固定的frame,不随时间改变相对于父frame。 但是,如果要发布移动frame,您可以更改broadcaster以随时间更改。 让我们改变carrot1 frame随时间相对于turtle1改变。编辑nodes/fixed_tf_broadcaster.py
#!/usr/bin/env python
import roslib
roslib.load_manifest('learning_tf')
import rospy
import tf
import math
if __name__ == '__main__':
rospy.init_node('my_tf_broadcaster')
br = tf.TransformBroadcaster()
rate = rospy.Rate(10.0)
while not rospy.is_shutdown():
t = rospy.Time.now().to_sec() * math.pi
br.sendTransform((2.0 * math.sin(t), 2.0 * math.cos(t), 0.0),
(0.0, 0.0, 0.0, 1.0),
rospy.Time.now(),
"carrot1",
"turtle1")
rate.sleep()

相关文章推荐
- ROS:关于tf的探索(4)Learning about tf and time(Python)
- ROS:关于tf的探索(1) Writing a tf broadcaster(Python)
- ROS:关于tf的探索(2)Writing a tf listener(Python)
- ROS进二阶学习笔记(1) TF 学习笔记3 -- TF Listener 编写 (Python)and Adding frame(Python)
- ROS探索总结(十八)——重读tf
- ROS探索(5)——Python控制SmartCar
- 关于tf.argmax - python
- 关于ROS下的Dynamic Reconfig的学习探索
- 关于参考古月《ROS探索总结(五)——创建简单的机器人模型smartcar》在kinetic中实现总结
- 【跟着stackoverflow学Pandas】 - Adding new column to existing DataFrame in Python pandas - Pandas 添加列
- ROS进二阶学习笔记(1) TF 学习笔记2: -- TF Broadcaster 编写 (Python)
- ROS Learning-019 learning_tf-03(编程) 添加额外的坐标系 (Python版)
- ROS Learning-019 learning_tf-03(编程) 添加额外的坐标系 (Python版)
- 关于“用Python和OpenCV创建一个图片搜索引擎的完整指南”在win7操作系统python3.6环境下的测试探索
- ROS探索总结(十六)(十七)(十八)(十九)——HRMRP机器人的设计 构建完整的机器人应用系统 重读tf 如何配置机器人的导航功能
- ROS Learning-014 learning_tf(编程) 坐标系变换(tf)广播员 (Python版)
- ROS Learning-022 learning_tf-06(编程) 现在与过去中穿梭 (Python版) --- waitForTransformFull() 函数
- tf教程(四):Adding a frame
- ros::tf一篇讲得非常好的关于tf变换的博客
- ROS Learning-014 learning_tf(编程) 坐标系变换(tf)广播员 (Python版)