i2c 驱动一:简介
2016-10-11 19:30
330 查看
有关linux的i2c相关文章有一下几篇,他们互相关联,应该一同看:
- i2c 驱动一:简介
- i2c 驱动二:devfs文件系统
- i2c 驱动三:自己实现设备和驱动分离
- i2c 驱动四:sysfs文件系统
- i2c 驱动五:gpio模拟i2c
i2c-dev.c,代表一个 i2c 的adapter ,一个 i2c或者 smbus 的主设备,不是一个i2c的从设备 i2c_client,这个文件提供了 read()、write()、read()、ioctl()和 close()等函数。i2c 的主设备号是89,次设备号是 0~255 ,自动注册的设备节点是“i2c-%d” (i2c-0, i2c-1,…, i2c-10,…)
busses/s3c2410.c,是 2440/2410 的驱动,其中包括 adapter 中的master_xfer 的实现和关联
chip文件夹,包含一些特定的 i2c 设备驱动,但是现在内核版本是 3.4.112 ,将这个文件的内容合并到了 misc 文件夹。
busses文件夹,包含了一些i2c总线的驱动,如针对S3C2410、S3C2440 和 S3C6410 等处理器的I2C 控制器驱动为 i2c-s3c2410.c
algos文件夹,实现了i2c总线适配器的 algorithm
mutex文件夹,实现了 i2c switch 的功能,扩展了i2c的路数,使得有限的i2c资源扩展出足够的接口,解决了i2c容量的问题
busses/s3c2410.c 是驱动文件
其他文件 是提供支持的文件
2.1
代表一个挂载到 i2c 总线上的一个实体的从设备,包含该设备所需的数据:
【该 i2c 设备所依附的 i2c 控制器】:struct i2c_adapter *adapter
【该 i2c 设备的驱动】:struct i2c_driver *driver
【该 i2c 设备的地址】:addr
【该 i2c 设备的名字】:name
2.2
i2c设备的驱动程序
2.3
算法,具体实现硬件上的传输控制
2.4
每一个 adapter 对应一个物理上的 i2c 控制器
2.5
说明:对 client 的其他成员的赋值在 ioctl 中由用户完成
将读到的数据放到了 msg 里边
对 (1) 中 adapter 中的 master_xfer 指针的赋值在 busses/s3c2410.c 中
subsys_initcall(i2c_adap_s3c_init);
--> i2c_adap_s3c_init{platform_driver_register(&s3c24xx_i2c_driver);}
--> s3c24xx_i2c_driver = {.probe = s3c24xx_i2c_probe,}
--> s3c24xx_i2c_probe{i2c->adap.algo = &s3c24xx_i2c_algorithm;}
--> s3c24xx_i2c_algorithm{.master_xfer= s3c24xx_i2c_xfer,}
--> s3c24xx_i2c_xfer(struct i2c_adapter *adap,
struct i2c_msg *msgs, int num)
--> s3c24xx_i2c_doxfer(i2c, msgs, num);
--> s3c24xx_i2c_enable_irq(i2c); s3c24xx_i2c_message_start(i2c, msgs);
timeout = wait_event_timeout(i2c->wait, i2c->msg_num == 0, HZ * 5);/* 阻塞在这里,直到 msg_num = 0,或者超过 5s */
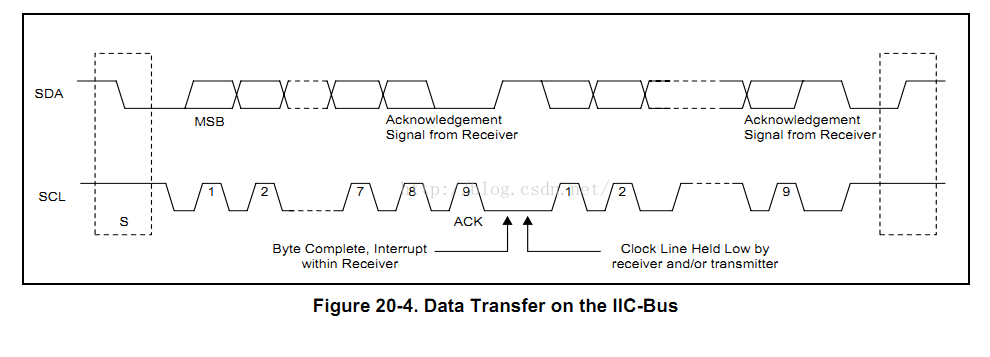
这张图可以看到,当接收,或者发送完一个字节在ack后边会产生一个中断
在probe中有申请中断
s3c24xx_i2c_probe(struct platform_device *pdev){ret = request_irq(i2c->irq, s3c24xx_i2c_irq, 0,
dev_name(&pdev->dev), i2c);}
--> s3c24xx_i2c_irq(int irqno, void *dev_id){i2c_s3c_irq_nextbyte(i2c, status);}
--> i2c_s3c_irq_nextbyte{switch (i2c->state)
{
case STATE_STOP:
case STATE_START:
case STATE_WRITE:
byte = i2c->msg->buf[i2c->msg_ptr++];
writeb(byte, i2c->regs + S3C2410_IICDS);
case STATE_READ:
byte = readb(i2c->regs + S3C2410_IICDS);
i2c->msg->buf[i2c->msg_ptr++] = byte;
}}
至此,数据发送的整个过程就全说完
(1)的结构体 i2c_rdwr_ioctl_data
需要包含头文件 <i2c-dev.h>
从设备的地址需要 右移一位
msg.flags = 0 是写,msg.flags =I2C_M_RD 是读
打开的i2c的设备是 open("/dev/i2c-0",O_RDWR); (需要先查看/dev 是不是有,如果没有,需要内核去支持 i2c 驱动)
- i2c 驱动一:简介
- i2c 驱动二:devfs文件系统
- i2c 驱动三:自己实现设备和驱动分离
- i2c 驱动四:sysfs文件系统
- i2c 驱动五:gpio模拟i2c
1. 内核源码中有关 i2c 的目录和文件:
1.1 有关 i2c 的驱动在 driver 的 i2c 目录下,先来介绍一下关键的几个文件:
i2c-core.c,实现了 I2C 核心的功能以及/proc/bus/i2c*接口i2c-dev.c,代表一个 i2c 的adapter ,一个 i2c或者 smbus 的主设备,不是一个i2c的从设备 i2c_client,这个文件提供了 read()、write()、read()、ioctl()和 close()等函数。i2c 的主设备号是89,次设备号是 0~255 ,自动注册的设备节点是“i2c-%d” (i2c-0, i2c-1,…, i2c-10,…)
busses/s3c2410.c,是 2440/2410 的驱动,其中包括 adapter 中的master_xfer 的实现和关联
chip文件夹,包含一些特定的 i2c 设备驱动,但是现在内核版本是 3.4.112 ,将这个文件的内容合并到了 misc 文件夹。
busses文件夹,包含了一些i2c总线的驱动,如针对S3C2410、S3C2440 和 S3C6410 等处理器的I2C 控制器驱动为 i2c-s3c2410.c
algos文件夹,实现了i2c总线适配器的 algorithm
mutex文件夹,实现了 i2c switch 的功能,扩展了i2c的路数,使得有限的i2c资源扩展出足够的接口,解决了i2c容量的问题
1.2 简单的理解:
i2c-dev.c 是设备文件busses/s3c2410.c 是驱动文件
其他文件 是提供支持的文件
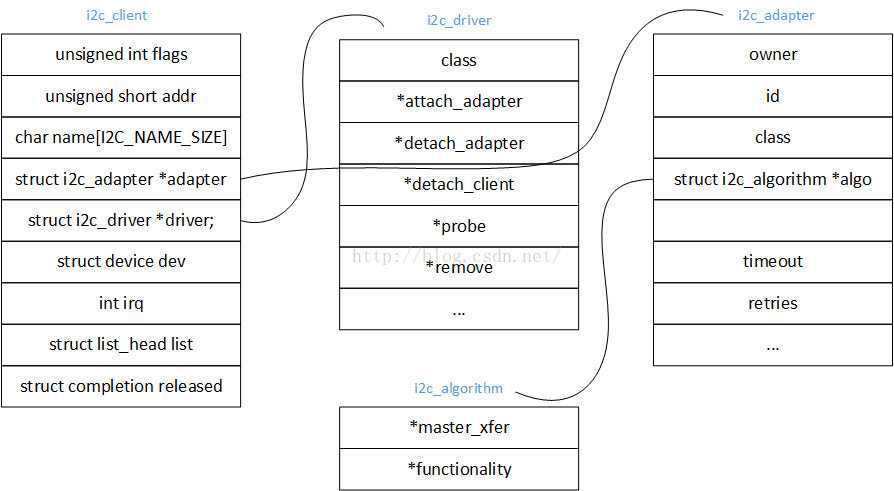
2. 在 include/linux/i2c.h 中定义了 i2c 用到关键的结构体:
2.1
i2c_client 结构体:
struct i2c_client {
unsigned int flags; /* 标志 */
unsigned short addr; /* 低 7 位为芯片地址 */
char name[I2C_NAME_SIZE]; /* 设备名称 */
struct i2c_adapter *adapter; /*依附的 i2c_adapter*/
struct i2c_driver *driver; /*依附的 i2c_driver */
struct device dev; /* 设备结构体*/
int irq; /* 设备使用的中断号*/
struct list_head list; /* 链表头 */
struct completion released; /* 用于同步 */
};代表一个挂载到 i2c 总线上的一个实体的从设备,包含该设备所需的数据:
【该 i2c 设备所依附的 i2c 控制器】:struct i2c_adapter *adapter
【该 i2c 设备的驱动】:struct i2c_driver *driver
【该 i2c 设备的地址】:addr
【该 i2c 设备的名字】:name
2.2
i2c_driver 结构体:
struct i2c_driver {
int id;
unsigned int class;
int (*attach_adapter)(struct i2c_adapter *); /*依附 i2c_adapter 函数指针 */
int (*detach_adapter)(struct i2c_adapter *); /*脱离 i2c_adapter 函数指针*/
int (*detach_client)(struct i2c_client *); /*i2c client 脱离函数指针*/
int (*probe)(struct i2c_client *, const struct i2c_device_id *);
int (*remove)(struct i2c_client *);
void (*shutdown)(struct i2c_client *);
int (*suspend)(struct i2c_client *, pm_message_t mesg);
int (*resume)(struct i2c_client *);
int (*command)(struct i2c_client *client, unsigned int cmd, void *arg);
struct device_driver driver;
const struct i2c_device_id *id_table; /* 该驱动所支持的设备 ID 表 */
int (*detect)(struct i2c_client *, int kind, struct i2c_board_info *);
const struct i2c_client_address_data *address_data;
struct list_head clients;
};i2c设备的驱动程序
2.3
i2c_algorithm 结构体:
struct i2c_algorithm {
int (*master_xfer)(struct i2c_adapter *adap,struct i2c_msg *msgs, int num); /*i2c 传输函数指针*/
int (*smbus_xfer) (struct i2c_adapter *adap, u16 addr, unsigned short flags, char read_write,
u8 command, int size, union i2c_smbus_data * data); /*smbus 传输函数指针*/
u32 (*functionality) (struct i2c_adapter *); /*返回适配器支持的功能*/
};算法,具体实现硬件上的传输控制
2.4
i2c_adapter 结构体:
struct i2c_adapter {
struct module *owner; /*所属模块*/
unsigned int id; /*algorithm 的类型,定义于 i2c-id.h,以 I2C_ALGO_开始*/
unsigned int class;
struct i2c_algorithm *algo; /*总线通信方法结构体指针*/
void *algo_data; /* algorithm 数据 */
int (*client_register)(struct i2c_client *); /*client 注册时调用*/
int (*client_unregister)(struct i2c_client *); /*client 注销时调用*/
u8 level;
struct semaphore bus_lock; /*控制并发访问的自旋锁*/
struct semaphore clist_lock;
int timeout;
int retries; /* 重试次数 */
struct device dev; /* 适配器设备 */
struct class_device class_dev; /* 类设备 */
int nr; /* /dev/i2c-devnr */ /* (1)这里要注意 */
struct list_head clien; /* client 链表头*/
struct list_head list;
char name[48]; /*适配器名称*/
struct completion dev_released; /*用于同步*/
};每一个 adapter 对应一个物理上的 i2c 控制器
2.5
i2c_msg 结构体:
struct i2c_msg {
__u16 addr; /* 设备地址*/
__u16 flags; /* 标志,下边是标志的定义 */
#define I2C_M_TEN 0x0010 /* 这是一个10位的芯片地址 */
#define I2C_M_RD 0x0001 /* 从从设备读数据,如果要写的话,flags = 0 */
#define I2C_M_NOSTART 0x4000 /* */
#define I2C_M_REV_DIR_ADDR 0x2000 /* */
#define I2C_M_IGNORE_NAK 0x1000 /* */
#define I2C_M_NO_RD_ACK 0x0800 /* */
#define I2C_M_RECV_LEN 0x0400 /* 长度将会是接收的第一个字节 */
__u16 len; /* 消息长度*/
__u8 *buf; /* 消息数据*/
};2.6 以上的几个结构体之间的关系:
3. 对 i2c-dev.c 文件中的函数的理解:
struct file_operations i2cdev_fops = {
...
.read = i2cdev_read,
.write = i2cdev_write,
.unlocked_ioctl= i2cdev_ioctl,
.open = i2cdev_open,
.release = i2cdev_release,
};3.1i2cdev_open 函数 (.open)
static int i2cdev_open(struct inode *inode, struct file *file)
{
unsigned int minor = iminor(inode);
struct i2c_client *client;
struct i2c_adapter *adap;
struct i2c_dev *i2c_dev;
i2c_dev = i2c_dev_get_by_minor(minor);
if (!i2c_dev)
return -ENODEV;
adap = i2c_get_adapter(i2c_dev->adap->nr); /* (3)通过adap->nr找到相应的adapter的首地址,idr机制采用的是radix树,可以很方便的将整数和指针关联起来,要了解更多idr机制,可以查看 http://blog.sina.com.cn/s/blog_476d8cf30100nhfc.html */
if (!adap)
return -ENODEV;
/* This creates an anonymous i2c_client, which may later be
* pointed to some address using I2C_SLAVE or I2C_SLAVE_FORCE.
*
* This client is ** NEVER REGISTERED ** with the driver model
* or I2C core code!! It just holds private copies of addressing
* information and maybe a PEC flag.
*/
client = kzalloc(sizeof(*client), GFP_KERNEL);
if (!client) {
i2c_put_adapter(adap);
return -ENOMEM;
}
snprintf(client->name, I2C_NAME_SIZE, "i2c-dev %d", adap->nr); /* client->name = i2c-dev ... */
client->adapter = adap; /* (1)匹配上 adapter,并且关联 client中的 adapter 指针 */
file->private_data = client; /* (2)放到私有数据中去 */
return 0;
}说明:对 client 的其他成员的赋值在 ioctl 中由用户完成
3.2 单个 msg 的读 (.read)
/* buf 是用于存放接收到的数据的指针,count 是数据中字节数 */static ssize_t i2cdev_read(struct file *file, char __user *buf, size_t count,
loff_t *offset)
{
char *tmp;
int ret;
struct i2c_client *client = file->private_data;
if (count > 8192)
count = 8192;
tmp = kmalloc(count, GFP_KERNEL);
if (tmp == NULL)
return -ENOMEM;
pr_debug("i2c-dev: i2c-%d reading %zu bytes.\n",
iminor(file->f_path.dentry->d_inode), count);
ret = i2c_master_recv(client, tmp, count); /* (1)将读到的数据放到了 tmp指针指向的空间 里边 */
if (ret >= 0)
ret = copy_to_user(buf, tmp, count) ? -EFAULT : ret;
kfree(tmp);
return ret;
}将读到的数据放到了 msg 里边
int i2c_master_recv(const struct i2c_client *client, char *buf, int count)
{
struct i2c_adapter *adap = client->adapter;
struct i2c_msg msg;
int ret;
msg.addr = client->addr;
msg.flags = client->flags & I2C_M_TEN;
msg.flags |= I2C_M_RD;
msg.len = count;
msg.buf = buf;
ret = i2c_transfer(adap, &msg, 1); /* (1)调用 adapter 中的 master_xfer 函数 */
/*
* If everything went ok (i.e. 1 msg received), return #bytes received,
* else error code.
*/
return (ret == 1) ? count : ret;
}对 (1) 中 adapter 中的 master_xfer 指针的赋值在 busses/s3c2410.c 中
subsys_initcall(i2c_adap_s3c_init);
--> i2c_adap_s3c_init{platform_driver_register(&s3c24xx_i2c_driver);}
--> s3c24xx_i2c_driver = {.probe = s3c24xx_i2c_probe,}
--> s3c24xx_i2c_probe{i2c->adap.algo = &s3c24xx_i2c_algorithm;}
--> s3c24xx_i2c_algorithm{.master_xfer= s3c24xx_i2c_xfer,}
--> s3c24xx_i2c_xfer(struct i2c_adapter *adap,
struct i2c_msg *msgs, int num)
--> s3c24xx_i2c_doxfer(i2c, msgs, num);
--> s3c24xx_i2c_enable_irq(i2c); s3c24xx_i2c_message_start(i2c, msgs);
timeout = wait_event_timeout(i2c->wait, i2c->msg_num == 0, HZ * 5);/* 阻塞在这里,直到 msg_num = 0,或者超过 5s */
这张图可以看到,当接收,或者发送完一个字节在ack后边会产生一个中断
在probe中有申请中断
s3c24xx_i2c_probe(struct platform_device *pdev){ret = request_irq(i2c->irq, s3c24xx_i2c_irq, 0,
dev_name(&pdev->dev), i2c);}
--> s3c24xx_i2c_irq(int irqno, void *dev_id){i2c_s3c_irq_nextbyte(i2c, status);}
--> i2c_s3c_irq_nextbyte{switch (i2c->state)
{
case STATE_STOP:
case STATE_START:
case STATE_WRITE:
byte = i2c->msg->buf[i2c->msg_ptr++];
writeb(byte, i2c->regs + S3C2410_IICDS);
case STATE_READ:
byte = readb(i2c->regs + S3C2410_IICDS);
i2c->msg->buf[i2c->msg_ptr++] = byte;
}}
至此,数据发送的整个过程就全说完
3.3 单个 msg 的写 (.write)
static ssize_t i2cdev_write(struct file *file, const char __user *buf,
size_t count, loff_t *offset)
{
int ret;
char *tmp;
struct i2c_client *client = file->private_data;
if (count > 8192)
count = 8192;
tmp = memdup_user(buf, count);
if (IS_ERR(tmp))
return PTR_ERR(tmp);
pr_debug("i2c-dev: i2c-%d writing %zu bytes.\n",
iminor(file->f_path.dentry->d_inode), count);
ret = i2c_master_send(client, tmp, count); /* 发送一个 count 字节的 msg */
kfree(tmp);
return ret;
}3.4 给用户层提供的控制 ioctl (.unlocked_ioctl)
static long i2cdev_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{
struct i2c_client *client = file->private_data;
unsigned long funcs;
dev_dbg(&client->adapter->dev, "ioctl, cmd=0x%02x, arg=0x%02lx\n",
cmd, arg);
switch (cmd) {
case I2C_SLAVE:
case I2C_SLAVE_FORCE:
/* NOTE: devices set up to work with "new style" drivers
* can't use I2C_SLAVE, even when the device node is not
* bound to a driver. Only I2C_SLAVE_FORCE will work.
*
* Setting the PEC flag here won't affect kernel drivers,
* which will be using the i2c_client node registered with
* the driver model core. Likewise, when that client has
* the PEC flag already set, the i2c-dev driver won't see
* (or use) this setting.
*/
if ((arg > 0x3ff) ||
(((client->flags & I2C_M_TEN) == 0) && arg > 0x7f))
return -EINVAL;
if (cmd == I2C_SLAVE && i2cdev_check_addr(client->adapter, arg))
return -EBUSY;
/* REVISIT: address could become busy later */
client->addr = arg;
return 0;
case I2C_TENBIT:
if (arg)
client->flags |= I2C_M_TEN;
else
client->flags &= ~I2C_M_TEN;
return 0;
case I2C_PEC:
if (arg)
client->flags |= I2C_CLIENT_PEC;
else
client->flags &= ~I2C_CLIENT_PEC;
return 0;
case I2C_FUNCS:
funcs = i2c_get_functionality(client->adapter);
return put_user(funcs, (unsigned long __user *)arg);
case I2C_RDWR:
return i2cdev_ioctl_rdrw(client, arg); /* 实现 多个 msg 的读写 */
case I2C_SMBUS:
return i2cdev_ioctl_smbus(client, arg);
case I2C_RETRIES:
client->adapter->retries = arg;
break;
case I2C_TIMEOUT:
/* 单位是 10ms. */
client->adapter->timeout = msecs_to_jiffies(arg * 10);
break;
default:
return -ENOTTY;
}
return 0;
}3.5 多个msg的读写
static noinline int i2cdev_ioctl_rdrw(struct i2c_client *client,
unsigned long arg)
{
struct i2c_rdwr_ioctl_data rdwr_arg; /* (1)应用程序要想发送多个msg需要用到的结构体 */
struct i2c_msg *rdwr_pa;
u8 __user **data_ptrs;
int i, res;
if (copy_from_user(&rdwr_arg,
(struct i2c_rdwr_ioctl_data __user *)arg,
sizeof(rdwr_arg))) /* (2)从用户空间传给内核空间 */
return -EFAULT;
/* 限制一次发送的 msg 的最大的个数是 42 */
if (rdwr_arg.nmsgs > I2C_RDRW_IOCTL_MAX_MSGS)
return -EINVAL;
rdwr_pa = memdup_user(rdwr_arg.msgs,
rdwr_arg.nmsgs * sizeof(struct i2c_msg)); /* (3)取出 rdwr_arg 中的 msg */
if (IS_ERR(rdwr_pa))
return PTR_ERR(rdwr_pa);
data_ptrs = kmalloc(rdwr_arg.nmsgs * sizeof(u8 __user *), GFP_KERNEL);
if (data_ptrs == NULL) {
kfree(rdwr_pa);
return -ENOMEM;
}
res = 0;
for (i = 0; i < rdwr_arg.nmsgs; i++) {
/* Limit the size of the message to a sane amount;
* and don't let length change either. */
if ((rdwr_pa[i].len > 8192) ||
(rdwr_pa[i].flags & I2C_M_RECV_LEN)) {
res = -EINVAL;
break;
}
data_ptrs[i] = (u8 __user *)rdwr_pa[i].buf;
rdwr_pa[i].buf = memdup_user(data_ptrs[i], rdwr_pa[i].len);
if (IS_ERR(rdwr_pa[i].buf)) {
res = PTR_ERR(rdwr_pa[i].buf);
break;
}
}
if (res < 0) {
int j;
for (j = 0; j < i; ++j)
kfree(rdwr_pa[j].buf);
kfree(data_ptrs);
kfree(rdwr_pa);
return res;
}
res = i2c_transfer(client->adapter, rdwr_pa, rdwr_arg.nmsgs); /* (4)发送 nmsgs 个 msg */
while (i-- > 0) {
if (res >= 0 && (rdwr_pa[i].flags & I2C_M_RD)) {
if (copy_to_user(data_ptrs[i], rdwr_pa[i].buf,
rdwr_pa[i].len))
res = -EFAULT;
}
kfree(rdwr_pa[i].buf);
}
kfree(data_ptrs);
kfree(rdwr_pa);
return res;
}(1)的结构体 i2c_rdwr_ioctl_data
需要包含头文件 <i2c-dev.h>
struct i2c_rdwr_ioctl_data {
struct i2c_msg __user *msgs; /* i2c_msgs 指针 */
__u32 nmsgs; /* i2c_msgs 的个数 */
};4. 用户写一个i2c驱动需要做的:
包含头文件: <linux/i2c.h><linux/i2c-dev.h>从设备的地址需要 右移一位
msg.flags = 0 是写,msg.flags =I2C_M_RD 是读
打开的i2c的设备是 open("/dev/i2c-0",O_RDWR); (需要先查看/dev 是不是有,如果没有,需要内核去支持 i2c 驱动)

相关文章推荐
- I2C子系统驱动架构 - 简介
- WinCE流设备驱动简介及GPIO驱动的实现
- linux i2c驱动讲解
- linux下I2C驱动的开发
- Linux I2C设备驱动编写
- linux下I2C驱动架构全面分析
- STM32F4XX高效驱动篇2 I2C
- 手把手教你写Linux I2C设备驱动
- linux下I2C驱动架构全面分析
- 嵌入式开发之zynq---Zynq PS侧I2C驱动架构
- 如何在Linux中让I2C驱动支持Sub Address的两种方法
- linux驱动基础系列--Linux I2c驱动分析
- OMAP3630 Linux I2C总线驱动分析
- 【引用】Linux-2.6.32.2内核在mini2440上的移植(十二)---移植I2C EEPROM驱动
- OMAP3630 Linux I2C总线驱动分析(1)
- Linux ALSA声卡驱动之一:ALSA架构简介
- Linux 驱动i2c -- Gsenser(一)
- Linux的I2C驱动架构
- linux下的I2C驱动记录(RK)
- Linux I2C驱动完全分析