图像旋转的原理,实现与优化
2016-09-11 15:19
429 查看
图像旋转的原理
图像旋转的原理其实很简单,为了简化公式的推导,这里我们假设绕原点(0,0)旋转。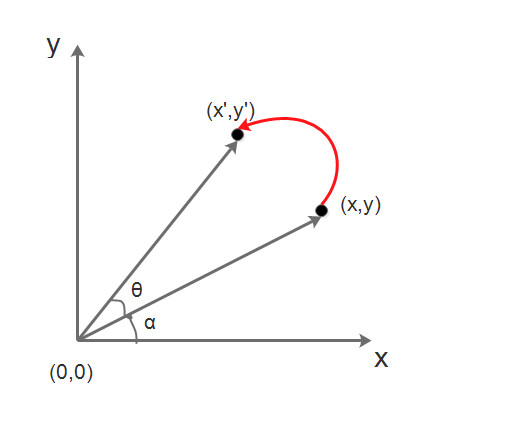
本文规定逆时针旋转为正,当然你也可以规定顺时针为正(此时,正角度就表示顺时针旋转)
很容易得到三个方程:
tan(θ+α)=y′x′(1)
tanα=yx(2)
x2+y2=x′2+y′2(3)
由和角公式可知
tan(θ+α)=tanθ+tanα1−tanθtanα
代入(1)和(2)可得
y′=x′(y+xtanθ)x−ytanθ(4)
(4)代入(3)得到:
x′2=(xcosθ−ysinθ)2(5)
(5)代入(3)
y′2=(xsinθ+ycosθ)2
所以
{x′=xcosθ+y(−sinθ)y′=xsinθ+ycosθ(6)
我们知道仿射变换矩阵可以表示为:
A=[cosθsinθ−sinθcosθ](7)
公式7与公式6在形式上是一致的(这里没有加入平移和缩放)
注意公式6中x,y,x′,y′实际表示x−0,y−0,x′−0,y′−0即与旋转中心横坐标以及纵坐标之间的距离,现在我们将旋转中心变为更具有一般性的(x0,y0),得旋转公式为:
{x′=(x−x0)cosθ+(y−y0)(−sinθ)+x0y′=(x−x0)sinθ+(y−y0)cosθ+y0(8)
对于图像来说,规定顺时针旋转角度为正,则旋转公式与上述公式一致,由于任意角度的旋转后会出现像素坐标为负的情况,如果不将旋转后的图像坐标平移,会缺失部分图像,所以,对于旋转后的图像,我们通常会加入一个平移
{x′=(x−x0)cosθ+(y−y0)(−sinθ)+x0+Δxy′=(x−x0)sinθ+(y−y0)cosθ+y0+Δy(9)
图像中使用后向映射,使用x′,y′表示x,y,则上述公式变为
{x=((x′−x0−Δx)cosθ+(y′−y0−Δy)sinθ)/scale+x0y=((x′−x0−Δx)(−sinθ)+(y′−y0−Δy)cosθ)/scale+y0(10)
这里加入了缩放,其中:scale>1表示原图放大 <1表示原图缩小
有了上面的公式,下面就可以写出相应的代码了
注:为什么公式推导的时候选用右手系?因为右手系与图像坐标系推导出来的公式在形式上是统一的,而右手系又是我们熟悉的坐标系。
图像旋转的实现
最近邻插值
先给出一个结构最简洁的版本,采用最近邻插值// 宏定义
#define DEGREE2RADIAN(x) (x*CV_PI/180)//角度转弧度
#define RADIAN2DEGREE(x) (x*180/CV_PI)//弧度转角度
#define SHIFT 10
#define DESCALE(x,n) (((x)+(1 << ((n)-1))) >> (n))
/* center:原图像的旋转中心
dstSize:旋转后图像的大小
theta:旋转角度,单位弧度,顺时针为正
scale:缩放,scale>1表示放大 <1表示缩小
*/
void Rotate_Nearest(const Mat &srcImage, Mat &dstImage, Point center, Size dstSize, double theta, double scale)
{
CV_Assert(srcImage.depth() == CV_8U);
dstImage.create(dstSize, srcImage.type());
int x0 = center.x;
int y0 = center.y;
theta = DEGREE2RADIAN(theta);
// dx,dy就是dst与src图像中心的距离
int dx = dstImage.cols/2 - srcImage.cols/2;
int dy = dstImage.rows/2 - srcImage.rows/2;
int numberOfChannels = srcImage.channels();
int widthOfDst = dstImage.cols;
int heightOfDst = dstImage.rows;
for (int y = 0; y <= heightOfDst - 1; ++y)
{
for (int x = 0; x <= widthOfDst - 1; ++x)
{
float srcX = ((x - x0 - dx)*cos(theta) + (y - y0 - dy)*sin(theta))/scale + x0;
float srcY = ((x0 + dx - x)*sin(theta) + (y - y0 - dy)*cos(theta))/scale + y0;
// get the nearest coordinate of src
int x1 = (int)srcX;
int y1 = (int)srcY;
if (numberOfChannels == 1)
{
if ((x1 >= 0 && x1 <= srcImage.cols - 1) && (y1 >= 0 && y1 <= srcImage.rows - 1))
{
dstImage.at<uchar>(y, x) = srcImage.at<uchar>(y1, x1);
}
else
{
// 越界赋值0
dstImage.at<uchar>(y, x) = 0;
}
}
else
{
if ((x1 >= 0 && x1 <= srcImage.cols - 1) && (y1 >= 0 && y1 <= srcImage.rows - 1))
{
dstImage.at<cv::Vec3b>(y, x) = srcImage.at<cv::Vec3b>(y1, x1);
}
else
{
dstImage.at<cv::Vec3b>(y, x) = cv::Vec3b(0,0,0);
}
}
}
}
}测试环境:测试图像都是1000*580到2500*2500(三通道彩色图)
测试代码:
Rotate_Nearest(srcImage, dstImage, Point(srcImage.cols / 2, srcImage.rows / 2), Size(2500, 2500), 30.0, 2);
效果:
原图:

结果:

无缩放测试:
Rotate_Nearest(srcImage, dstImage, Point(srcImage.cols / 2, srcImage.rows / 2), Size(2500, 2500), 30.0, 1);
结果:

双线性插值
下面我们对他进行优化,首先我们将最近邻插值改用更为通用的双线性插值,代码如下void Rotate_Bilinear(const Mat &srcImage, Mat &dstImage, Point center, Size dstSize, double theta, double scale)
{
CV_Assert(srcImage.depth() == CV_8U);
dstImage.create(dstSize, srcImage.type());
dstImage.setTo(Scalar(0, 0, 0));
int x0 = center.x;
int y0 = center.y;
theta = DEGREE2RADIAN(theta);
//
Mat extendedImage;
copyMakeBorder(srcImage, extendedImage, 1, 1, 1, 1, BORDER_CONSTANT,Scalar(0,0,0)); // 使用0填充边界
// dx,dy就是dst与src图像中心的距离
int dx = dstImage.cols / 2 - srcImage.cols / 2;
int dy = dstImage.rows / 2 - srcImage.rows / 2;
int numberOfChannels = srcImage.channels();
int widthOfDst = dstImage.cols;
int heightOfDst = dstImage.rows;
for (int y = 0; y <= heightOfDst - 1; ++y)
{
for (int x = 0; x <= widthOfDst - 1; ++x)
{
// 按照原来的方式计算原图坐标
float srcX = ((x - x0 - dx)*cos(theta) + (y - y0 - dy)*sin(theta)) / scale + x0;
float srcY = ((x0 + dx - x)*sin(theta) + (y - y0 - dy)*cos(theta)) / scale + y0;
// 加1,得到在extendedImage中的坐标
srcX++;
srcY++;
// get the nearest coordinate of src
int x1 = (int)(srcX);
int y1 = (int)(srcY);
// 浮点转化为整数
int dx1 = (srcX - x1)*(1<< SHIFT);
int dy1 = (srcY - y1)*(1<< SHIFT);
if (numberOfChannels == 1)
{
// !!!注意这里的范围,在extendedImage中,原图的范围就是1~cols - 2了
if ((x1 >= 1 && x1 <= extendedImage.cols - 2) && (y1 >= 1 && y1 <= extendedImage.rows - 2))
{
//双线性插值
//周围4个点
//a就是最近邻像素
//a b
// p
//c d
uchar a = extendedImage.at<uchar>(y1, x1);
uchar b = extendedImage.at<uchar>(y1, x1 + 1);
uchar c = extendedImage.at<uchar>(y1 + 1, x1);
uchar d = extendedImage.at<uchar>(y1 + 1, x1 + 1);
//int p = (a*((1 << SHIFT) - dx1)*((1 << SHIFT) - dy1) + b*dx1*((1 << SHIFT) - dy1) + c*((1 << SHIFT) - dx1)*dy1 + d*dx1*dy1)/(1<<(2* SHIFT));
int p = a*((1 << SHIFT) - dx1)*((1 << SHIFT) - dy1) + b*dx1*((1 << SHIFT) - dy1) + c*((1 << SHIFT) - dx1)*dy1 + d*dx1*dy1;
p = DESCALE(p, 2*SHIFT);
dstImage.at<uchar>(y, x) = p;
}
else
{
// 越界赋值0
dstImage.at<uchar>(y, x) = 0;
}
}
else
{
if ((x1 >= 1 && x1 <= extendedImage.cols - 2) && (y1 >= 1 && y1 <= extendedImage.rows - 2))
{
//双线性插值
//周围4个点
//a就是最近邻像素
//a b
// p
//c d
Vec3b a = extendedImage.at<Vec3b>(y1, x1);
Vec3b b = extendedImage.at<Vec3b>(y1, x1 + 1);
Vec3b c = extendedImage.at<Vec3b>(y1 + 1, x1);
Vec3b d = extendedImage.at<Vec3b>(y1 + 1, x1 + 1);
/*int p1 = (a[0] * ((1 << SHIFT) - dx1)*((1 << SHIFT) - dy1) + b[0] * dx1*((1 << SHIFT) - dy1) + c[0] * ((1 << SHIFT) - dx1)*dy1 + d[0] * dx1*dy1)/(1<<(2*SHIFT));
int p2 = (a[1] * ((1 << SHIFT) - dx1)*((1 << SHIFT) - dy1) + b[1] * dx1*((1 << SHIFT) - dy1) + c[1] * ((1 << SHIFT) - dx1)*dy1 + d[1] * dx1*dy1)/ (1 << (2 * SHIFT));
int p3 = (a[2] * ((1 << SHIFT) - dx1)*((1 << SHIFT) - dy1) + b[2] * dx1*((1 << SHIFT) - dy1) + c[2] * ((1 << SHIFT) - dx1)*dy1 + d[2] * dx1*dy1)/ (1 << (2 * SHIFT));*/
int p1 = a[0]*((1 << SHIFT) - dx1)*((1 << SHIFT) - dy1) + b[0]*dx1*((1 << SHIFT) - dy1) + c[0]*((1 << SHIFT) - dx1)*dy1 + d[0]*dx1*dy1;
p1 = DESCALE(p1, 2 * SHIFT);
int p2 = a[1]*((1 << SHIFT) - dx1)*((1 << SHIFT) - dy1) + b[1]*dx1*((1 << SHIFT) - dy1) + c[1]*((1 << SHIFT) - dx1)*dy1 + d[1] *dx1*dy1;
p2 = DESCALE(p2, 2 * SHIFT);
int p3 = a[2]*((1 << SHIFT) - dx1)*((1 << SHIFT) - dy1) + b[2]*dx1*((1 << SHIFT) - dy1) + c[2]*((1 << SHIFT) - dx1)*dy1 + d[2] *dx1*dy1;
p3 = DESCALE(p3, 2 * SHIFT);
dstImage.at<cv::Vec3b>(y, x) = Vec3b(p1,p2,p3);
}
else
{
dstImage.at<cv::Vec3b>(y, x) = cv::Vec3b(0, 0, 0);
}
}
}
}
}测试方法与上述相同,测试代码如下:
Rotate_Bilinear(srcImage, dstImage, Point(srcImage.cols / 2, srcImage.rows / 2), Size(2500, 2500),30.0, 2);
基本旋转效果都是一样的,下面我们看局部放大图

这是最近邻的眼部区域

双线性在保持图像细节方面要好于最近邻,而且不容易产生锯齿
双线性的优化
上面的双线性插值速度比较慢,我们对其进行优化,主要优化有:1.将循环内部不变量提取出来
由于sin和cos的计算是比较慢的函数,所以可以将他们提前计算好,而不是每次循环都要计算
如:
double sinTheta = sin(theta);
double cosTheta = cos(theta);
2.改变循环体内循环变量自增的方式
采用加法自增的方式,而不是每次都要计算乘法,详见代码
注:浮点数转化为整数的优化,上面已经涉及,这里不再说明
优化后的代码如下:
void Rotate_Bilinear2(const Mat &srcImage, Mat &dstImage, Point center, Size dstSize, double theta, double scale)
{
CV_Assert(srcImage.depth() == CV_8U);
dstImage.create(dstSize, srcImage.type());
dstImage.setTo(Scalar(0, 0, 0));
int x0 = center.x;
int y0 = center.y;
theta = DEGREE2RADIAN(theta);
//
Mat extendedImage;
copyMakeBorder(srcImage, extendedImage, 1, 1, 1, 1, BORDER_CONSTANT, Scalar(0, 0, 0)); // 使用0填充边界
// dx,dy就是dst与src图像中心的距离
int dx = dstImage.cols / 2 - srcImage.cols / 2;
int dy = dstImage.rows / 2 - srcImage.rows / 2;
int numberOfChannels = srcImage.channels();
int widthOfDst = dstImage.cols;
int heightOfDst = dstImage.rows;
////////////////////////////////// 优化部分/////////////////////////////
// 将循环内的不变量提取出来
double sinTheta = sin(theta);
double cosTheta = cos(theta);
scale = 1.0 / scale;
// 改变了循环内部增量的方式
double temp1= (0 - y0 - dy)*sinTheta;
double temp2 = (0 - y0 - dy)*cosTheta;
double dtemp1 = sinTheta;
double dtemp2 = cosTheta;
for (int y = 0; y <= heightOfDst - 1; ++y,temp1+=dtemp1,temp2+=dtemp2)
{
// 改变了循环内部增量的方式
double temp3= ((0 - x0 - dx)*cosTheta + temp1)*scale + x0;
double temp4= (-(0 - x0 - dx)*sinTheta + temp2)*scale + y0;
double dtemp3 = (cosTheta)*scale;
double dtemp4= (-sinTheta)*scale;
for (int x = 0; x <= widthOfDst - 1; ++x,temp3+=dtemp3,temp4+=dtemp4)
{
// 计算原图坐标
double srcX = temp3;
double srcY = temp4;
// 加1,得到在extendedImage中的坐标
srcX++;
srcY++;
// get the nearest coordinate of src
int x1 = (int)(srcX);
int y1 = (int)(srcY);
// 浮点转化为整数
int dx1 = (srcX - x1)*(1 << SHIFT);
int dy1 = (srcY - y1)*(1 << SHIFT);
if (numberOfChannels == 1)
{
// !!!注意这里的范围,在extendedImage中,原图的范围就是1~cols - 2了
if ((x1 >= 1 && x1 <= extendedImage.cols - 2) && (y1 >= 1 && y1 <= extendedImage.rows - 2))
{
//双线性插值
//周围4个点
//a就是最近邻像素
//a b
// p
//c d
uchar a = extendedImage.at<uchar>(y1, x1);
uchar b = extendedImage.at<uchar>(y1, x1 + 1);
uchar c = extendedImage.at<uchar>(y1 + 1, x1);
uchar d = extendedImage.at<uchar>(y1 + 1, x1 + 1);
//int p = (a*((1 << SHIFT) - dx1)*((1 << SHIFT) - dy1) + b*dx1*((1 << SHIFT) - dy1) + c*((1 << SHIFT) - dx1)*dy1 + d*dx1*dy1)/(1<<(2* SHIFT));
int p = a*((1 << SHIFT) - dx1)*((1 << SHIFT) - dy1) + b*dx1*((1 << SHIFT) - dy1) + c*((1 << SHIFT) - dx1)*dy1 + d*dx1*dy1;
p = DESCALE(p, 2 * SHIFT);
dstImage.at<uchar>(y, x) = p;
}
else
{
// 越界赋值0
dstImage.at<uchar>(y, x) = 0;
}
}
else
{
if ((x1 >= 1 && x1 <= extendedImage.cols - 2) && (y1 >= 1 && y1 <= extendedImage.rows - 2))
{
//双线性插值
//周围4个点
//a就是最近邻像素
//a b
// p
//c d
Vec3b a = extendedImage.at<Vec3b>(y1, x1);
Vec3b b = extendedImage.at<Vec3b>(y1, x1 + 1);
Vec3b c = extendedImage.at<Vec3b>(y1 + 1, x1);
Vec3b d = extendedImage.at<Vec3b>(y1 + 1, x1 + 1);
/*int p1 = (a[0] * ((1 << SHIFT) - dx1)*((1 << SHIFT) - dy1) + b[0] * dx1*((1 << SHIFT) - dy1) + c[0] * ((1 << SHIFT) - dx1)*dy1 + d[0] * dx1*dy1)/(1<<(2*SHIFT));
int p2 = (a[1] * ((1 << SHIFT) - dx1)*((1 << SHIFT) - dy1) + b[1] * dx1*((1 << SHIFT) - dy1) + c[1] * ((1 << SHIFT) - dx1)*dy1 + d[1] * dx1*dy1)/ (1 << (2 * SHIFT));
int p3 = (a[2] * ((1 << SHIFT) - dx1)*((1 << SHIFT) - dy1) + b[2] * dx1*((1 << SHIFT) - dy1) + c[2] * ((1 << SHIFT) - dx1)*dy1 + d[2] * dx1*dy1)/ (1 << (2 * SHIFT));*/
int p1 = a[0] * ((1 << SHIFT) - dx1)*((1 << SHIFT) - dy1) + b[0] * dx1*((1 << SHIFT) - dy1) + c[0] * ((1 << SHIFT) - dx1)*dy1 + d[0] * dx1*dy1;
p1 = DESCALE(p1, 2 * SHIFT);
int p2 = a[1] * ((1 << SHIFT) - dx1)*((1 << SHIFT) - dy1) + b[1] * dx1*((1 << SHIFT) - dy1) + c[1] * ((1 << SHIFT) - dx1)*dy1 + d[1] * dx1*dy1;
p2 = DESCALE(p2, 2 * SHIFT);
int p3 = a[2] * ((1 << SHIFT) - dx1)*((1 << SHIFT) - dy1) + b[2] * dx1*((1 << SHIFT) - dy1) + c[2] * ((1 << SHIFT) - dx1)*dy1 + d[2] * dx1*dy1;
p3 = DESCALE(p3, 2 * SHIFT);
dstImage.at<cv::Vec3b>(y, x) = Vec3b(p1, p2, p3);
}
else
{
dstImage.at<cv::Vec3b>(y, x) = cv::Vec3b(0, 0, 0);
}
}
}
}
}下面我们测试一下他们的速度
测试环境:Intel core i5-6200U,12G,测试图像都是1000*580到2500*2500(三通道彩色图),放大2倍
| 测试方法 | Rotate_Nearest | Rotate_Bilinear | Rotate_Bilinear2 |
|---|---|---|---|
| 速度(单位ms) | 58.2 | 144.9 | 78.7 |
双线性代码还可以进一步的优化,有兴趣的朋友可以自己实现。
2016-9-11 15:12:24
Last Updated:2017-3-11 23:22:16
非常感谢您的阅读,如果您觉得这篇文章对您有帮助,欢迎扫码进行赞赏。


相关文章推荐
- iOS多界面传值之--通知传值
- C语言 顺序表的实现 (动态)
- Javascript 严格模式详解
- linux C gbk utf-8编码转换
- Poedu_C语言_lesson09_20160908_编程概述
- shell 脚本 set 命令
- Web大文件下载控件(down2)-示例更新-Xproer.HttpDownloader
- Android 输入系统分析
- poj 3126 Prime Path
- SQL Server中timestamp(时间戳)
- 如何使用Axis发布WebService
- 第六周作业
- popupWindow 设置指定的出现位置
- CocoaPods安装过程的注意事项
- KVM 虚拟机联网方式:NAT 和 Bridge
- java中的String StringBuilder StringBuffer
- 玩转Bash变量
- getline()与cin.getline()
- bzoj 1568: [JSOI2008]Blue Mary开公司(超哥线段树)
- iOS 全面支持 webp格式图片