《PCL点云库学习&VS2010(X64)》Part 17 PCL1.72(VTK6.2.0)数据格式转换txt2pcd
2016-08-31 11:36
627 查看
《PCL点云库学习&VS2010(X64)》Part 17 PCL1.72(VTK6.2.0)数据格式转换txt2pcd
1、txt转换成pcd点云格式
#include<iostream>
#include<fstream>
#include <string>
#include <vector>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
using namespace std;
int main()
{
typedef struct tagPOINT_3D
{
double x; //mm world coordinate x
double y; //mm world coordinate y
double z; //mm world coordinate z
double r;
}POINT_WORLD;
/////加载txt数据
int number_Txt;
FILE *fp_txt;
tagPOINT_3D TxtPoint;
vector<tagPOINT_3D> m_vTxtPoints;
fp_txt = fopen("D:/C++Workspace/Model/bunny1.txt", "r");
if (fp_txt)
{
while (fscanf(fp_txt, "%lf %lf %lf", &TxtPoint.x, &TxtPoint.y, &TxtPoint.z) != EOF)
{
m_vTxtPoints.push_back(TxtPoint);
}
}
else
cout << "txt数据加载失败!" << endl;
number_Txt = m_vTxtPoints.size();
//pcl::PointCloud<pcl::PointXYZ> cloud;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
// Fill in the cloud data
cloud->width = number_Txt;
cloud->height = 1;
cloud->is_dense = false;
cloud->points.resize(cloud->width * cloud->height);
for (size_t i = 0; i < cloud->points.size(); ++i)
{
cloud->points[i].x = m_vTxtPoints[i].x;
cloud->points[i].y = m_vTxtPoints[i].y;
cloud->points[i].z = m_vTxtPoints[i].z;
}
pcl::io::savePCDFileASCII("D:/C++Workspace/Model/txt2pcd_bunny1.pcd", *cloud);
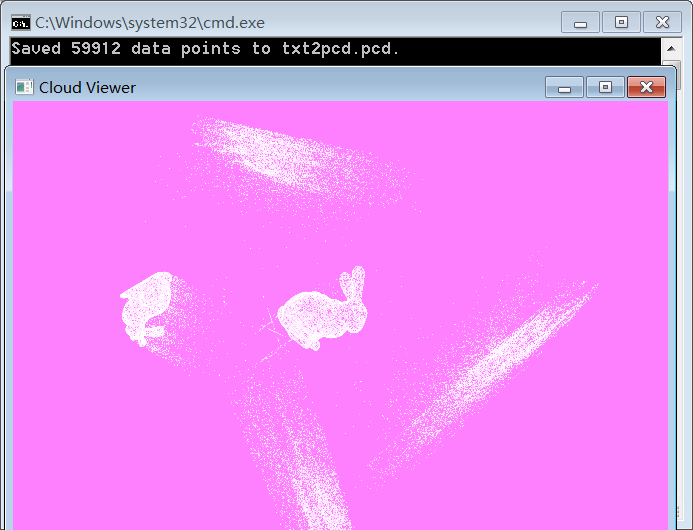
std::cerr << "Saved " << cloud->points.size() << " data points to txt2pcd.pcd." << std::endl;
//for (size_t i = 0; i < cloud.points.size(); ++i)
// std::cerr << " " << cloud.points[i].x << " " << cloud.points[i].y << " " << cloud.points[i].z << std::endl;
//PCL Visualizer
// Viewer
pcl::visualization::PCLVisualizer viewer("Cloud Viewer");
viewer.addPointCloud(cloud);
viewer.setBackgroundColor(1, 0.5, 1);
viewer.spin();
system("pause");
return 0;
}
将转换后的结果显示出来
1、txt转换成pcd点云格式
#include<iostream>
#include<fstream>
#include <string>
#include <vector>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
using namespace std;
int main()
{
typedef struct tagPOINT_3D
{
double x; //mm world coordinate x
double y; //mm world coordinate y
double z; //mm world coordinate z
double r;
}POINT_WORLD;
/////加载txt数据
int number_Txt;
FILE *fp_txt;
tagPOINT_3D TxtPoint;
vector<tagPOINT_3D> m_vTxtPoints;
fp_txt = fopen("D:/C++Workspace/Model/bunny1.txt", "r");
if (fp_txt)
{
while (fscanf(fp_txt, "%lf %lf %lf", &TxtPoint.x, &TxtPoint.y, &TxtPoint.z) != EOF)
{
m_vTxtPoints.push_back(TxtPoint);
}
}
else
cout << "txt数据加载失败!" << endl;
number_Txt = m_vTxtPoints.size();
//pcl::PointCloud<pcl::PointXYZ> cloud;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
// Fill in the cloud data
cloud->width = number_Txt;
cloud->height = 1;
cloud->is_dense = false;
cloud->points.resize(cloud->width * cloud->height);
for (size_t i = 0; i < cloud->points.size(); ++i)
{
cloud->points[i].x = m_vTxtPoints[i].x;
cloud->points[i].y = m_vTxtPoints[i].y;
cloud->points[i].z = m_vTxtPoints[i].z;
}
pcl::io::savePCDFileASCII("D:/C++Workspace/Model/txt2pcd_bunny1.pcd", *cloud);
std::cerr << "Saved " << cloud->points.size() << " data points to txt2pcd.pcd." << std::endl;
//for (size_t i = 0; i < cloud.points.size(); ++i)
// std::cerr << " " << cloud.points[i].x << " " << cloud.points[i].y << " " << cloud.points[i].z << std::endl;
//PCL Visualizer
// Viewer
pcl::visualization::PCLVisualizer viewer("Cloud Viewer");
viewer.addPointCloud(cloud);
viewer.setBackgroundColor(1, 0.5, 1);
viewer.spin();
system("pause");
return 0;
}
将转换后的结果显示出来

相关文章推荐
- 《PCL点云库学习&VS2010(X64)》Part 19 PCL1.72(VTK6.2.0)PCL程序计时
- 《PCL点云库学习&VS2010(X64)》Part 12 PCL1.72(VTK6.2.0)三角网格化(1)
- 《PCL点云库学习&VS2010(X64)》Part 18 PCL1.72(VTK6.2.0)编译CloudCompare注意点
- 《PCL点云库学习&VS2010(X64)》Part 20 PCL1.72(VTK6.2.0)PCL控制台程序线程
- 《PCL点云库学习&VS2010(X64)》Part 8 PCL1.72(VTK6.2.0)可视化例程
- 《PCL点云库学习&VS2010(X64)》Part 14 PCL1.72(VTK6.2.0)点云分割(Point Cloud Segmentation)
- 《PCL点云库学习&VS2010(X64)》Part 15 PCL1.72(VTK6.2.0)三角网格化(2)之泊松重构
- 《PCL点云库学习&VS2010(X64)》Part 13 PCL1.72(VTK6.2.0)ICP示例
- 《PCL点云库学习&VS2010(X64)》Part 21 VTK6.2+VS2013 利用PCL读取ply格式网格曲面
- 《PCL点云库学习&VS2010(X64)》Part 11 PCL1.72(VTK6.2.0)点特征描述与提取
- 《PCL点云库学习&VS2010(X64)》Part 10 PCL1.72(VTK6.2.0)选点操作
- 《PCL点云库学习&VS2010(X64)》Part 16 PCL1.72(VTK6.2.0)滤波例程(2)之双边滤波
- 《PCL点云库学习&VS2010(X64)》Part 9 PCL1.72(VTK6.2.0)滤波例程
- 《PCL点云库学习&VS2010(X64)》Part 24 PCL&VTK&Eigen Spline曲线拟合
- 《PCL点云库学习&VS2010(X64)》Part 6 VTK6.2+VS2013+Qt5.5 测试VTK基于VS2013的Qt程序之PCLViewer
- 《PCL点云库学习&VS2010(X64)》Part 29 PCL使用类成员函数作为pclvisualizer的回调函数
- TXT格式点云数据转换成pcd格式用pcl
- 《PCL点云库学习&VS2010(X64)》Part 26 PCL中的fromPCLPointCloud2与toPCLPointCloud2
- 《PCL点云库学习&VS2010(X64)》Part 27 PCL中的区域增长之—Region_Growing算法
- 《PCL点云库学习&VS2010(X64)》Part 2 A simple test of PCL in MFC