移植mavlink协议到STM32详细教程
2016-08-24 09:47
323 查看
1准备材料,
首先准备一个带串口的stm32程序(这里选用整点原子的官方串口例程这里自己去找不讲)作者:恒久力行 QQ:624668529,然后去mavlink官网下载mavlink源码,这里重点讲解这里
a.进入mavlink官网(http://qgroundcontrol.org/mavlink/start),下拉到MAVLink Code and Generator如下图,得到mavlink源码有多种途径,这里选取用python生成。即点击MAVLink Generator (C/C++, Python)
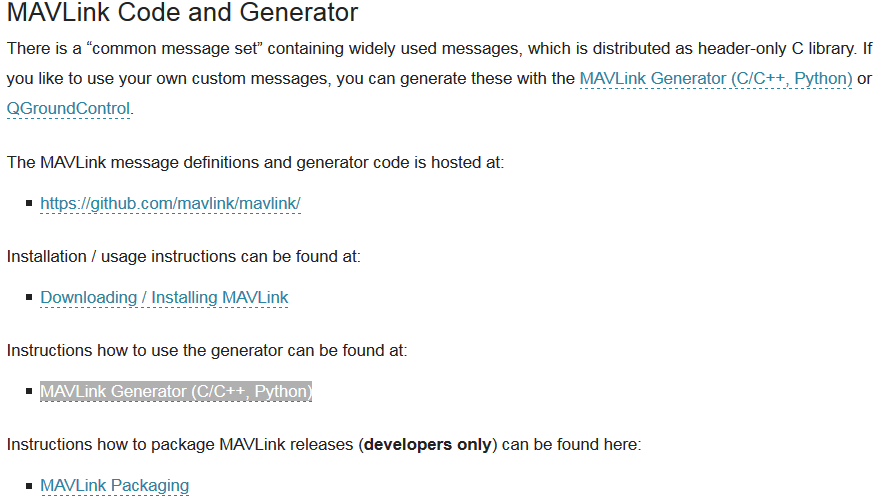
b.然后进入如下界面,点击网址,下面是生成的方法和步骤都写有

c.然后点击clone and downed里面的download zip 即可下载
下载好后解压,然后直接运行mavlink-master里面的mavgenerate.py(python环境自己安装,这里不讲)
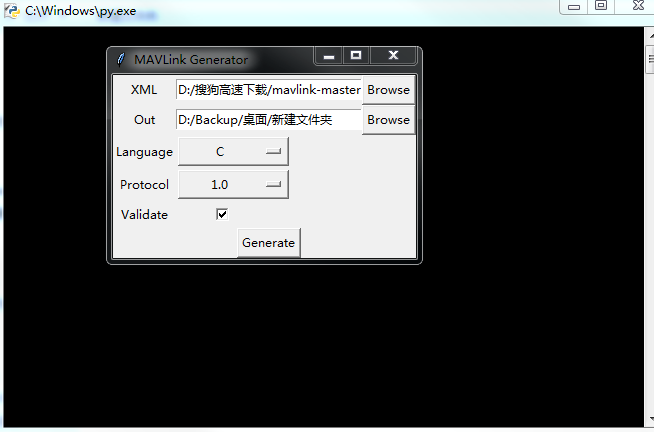
然后进入如下界面

点击第一个browse选择message_definitions文件夹里面的v1.0里面的common.xml
然后自己选择输出路径我这里选的新建文件夹
language选择C
protocol选择1.0
然后直接点generate生成
到此材料准备完毕。
2开始真正的移植工作
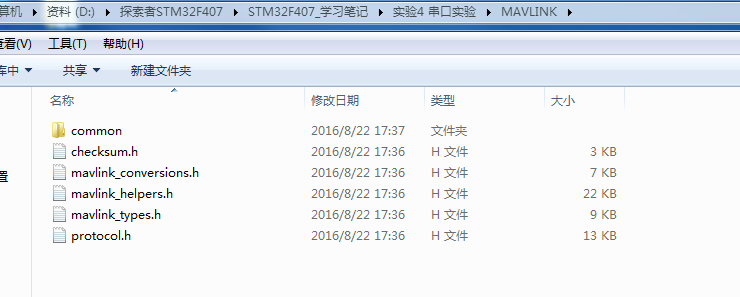
a.在串口实验里新建一个MAVLINK文件夹,并将刚才生成的文件拷贝过来,如图
打开工程新建分组,将所有拷贝过来的文件和头文件目录添加好,具体这里就不讲了,添加好后如图
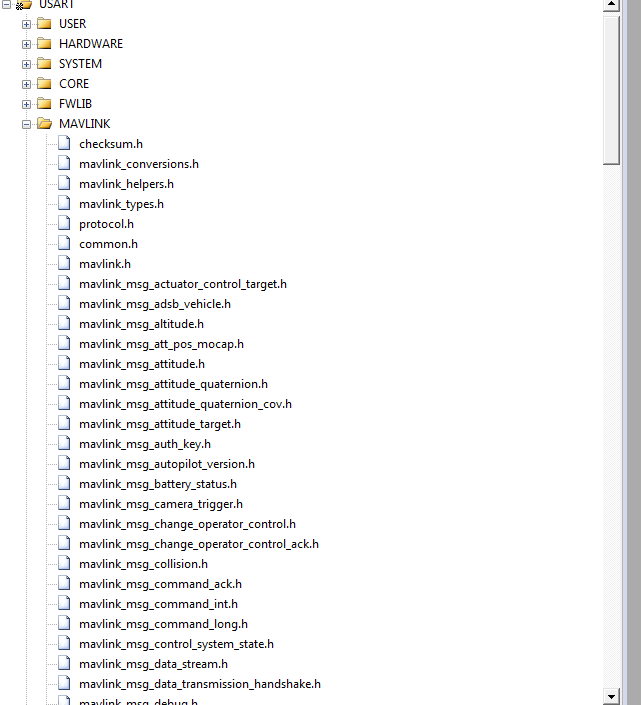
b.在main函数中添加#include "mavlink.h"如下

然后编译
"..\OBJ\USART.axf" - 30 Error(s), 17 Warning(s).
一个一个解决。
错误一:
..\MAVLINK\common\../mavlink_types.h(53): error: #20: identifier "pack" is undefined
解决方法:
将mavlink_types.h中
改为

这里不使用对齐字节了,直接用也是一样的。
编译后:
"..\OBJ\USART.axf" - 30 Error(s), 7 Warning(s).
错误二:
..\MAVLINK\common\../mavlink_types.h(54): error: #3092: anonymous unions are only supported in --gnu mode, or when enabled with #pragma anon_unions
解决方法:
根据提示信息在mavlink_types.h的前面加入#pragma anon_unions

编译后:
"..\OBJ\USART.axf" - 30 Error(s), 8 Warning(s).
错误三:
..\MAVLINK\common\../checksum.h(34): warning: #260-D: explicit type is missing ("int" assumed)
包括后面很多错误都有共同点,指向有inline的行,这里是因为mdk中无法识别inline
解决方法:
在checksum.h加入一行代码定义inline
编译后:
"..\OBJ\USART.axf" - 4 Error(s), 195 Warning(s).
错误四:
..\MAVLINK\common\../mavlink_conversions.h(167): error: #268: declaration may not appear after executable statement in block
解决方法:
指向定义的变量,将变量的定义放到函数的最前端(四个错误都是这种错误)
以前mavlink_conversions.h的代码
更改后mavlink_conversions.h的代码
以前mavlink_helpers.h的代码
更改后mavlink_helpers.h的代码
编译后:
"..\OBJ\USART.axf" - 0 Error(s), 195 Warning(s).
解决所有警告的方法:
将protocol.h里面的旧代码
去掉const,改为
编译后:
"..\OBJ\USART.axf" - 0 Error(s), 0 Warning(s).
3开始更改底层串口代码
待续。。。
作者:恒久力行 QQ:624668529
这里有移植的完整教程,两个教程参考着看吧附上网址http://www.cnblogs.com/lovechen/p/5809709.html
来自为知笔记(Wiz)
首先准备一个带串口的stm32程序(这里选用整点原子的官方串口例程这里自己去找不讲)作者:恒久力行 QQ:624668529,然后去mavlink官网下载mavlink源码,这里重点讲解这里
a.进入mavlink官网(http://qgroundcontrol.org/mavlink/start),下拉到MAVLink Code and Generator如下图,得到mavlink源码有多种途径,这里选取用python生成。即点击MAVLink Generator (C/C++, Python)
b.然后进入如下界面,点击网址,下面是生成的方法和步骤都写有
c.然后点击clone and downed里面的download zip 即可下载
下载好后解压,然后直接运行mavlink-master里面的mavgenerate.py(python环境自己安装,这里不讲)
然后进入如下界面
点击第一个browse选择message_definitions文件夹里面的v1.0里面的common.xml
然后自己选择输出路径我这里选的新建文件夹
language选择C
protocol选择1.0
然后直接点generate生成
到此材料准备完毕。
2开始真正的移植工作
a.在串口实验里新建一个MAVLINK文件夹,并将刚才生成的文件拷贝过来,如图
打开工程新建分组,将所有拷贝过来的文件和头文件目录添加好,具体这里就不讲了,添加好后如图
b.在main函数中添加#include "mavlink.h"如下
然后编译
"..\OBJ\USART.axf" - 30 Error(s), 17 Warning(s).
一个一个解决。
错误一:
..\MAVLINK\common\../mavlink_types.h(53): error: #20: identifier "pack" is undefined
解决方法:
将mavlink_types.h中
#define MAVPACKED( __Declaration__ ) __pragma( pack(push,1)) __Declaration__ __pragma( pack(pop))
改为
#define MAVPACKED( __Declaration__ ) __Declaration__
这里不使用对齐字节了,直接用也是一样的。
编译后:
"..\OBJ\USART.axf" - 30 Error(s), 7 Warning(s).
错误二:
..\MAVLINK\common\../mavlink_types.h(54): error: #3092: anonymous unions are only supported in --gnu mode, or when enabled with #pragma anon_unions
解决方法:
根据提示信息在mavlink_types.h的前面加入#pragma anon_unions
编译后:
"..\OBJ\USART.axf" - 30 Error(s), 8 Warning(s).
错误三:
..\MAVLINK\common\../checksum.h(34): warning: #260-D: explicit type is missing ("int" assumed)
包括后面很多错误都有共同点,指向有inline的行,这里是因为mdk中无法识别inline
解决方法:
在checksum.h加入一行代码定义inline
#defineinline __INLINE
编译后:
"..\OBJ\USART.axf" - 4 Error(s), 195 Warning(s).
错误四:
..\MAVLINK\common\../mavlink_conversions.h(167): error: #268: declaration may not appear after executable statement in block
解决方法:
指向定义的变量,将变量的定义放到函数的最前端(四个错误都是这种错误)
以前mavlink_conversions.h的代码
MAVLINK_HELPER void mavlink_dcm_to_quaternion(constfloat dcm[3][3],float quaternion[4])
{float tr = dcm[0][0]+ dcm[1][1]+ dcm[2][2];
if(tr >0.0f){float s = sqrtf(tr +1.0f);
quaternion[0]= s *0.5f;
s =0.5f/ s;
quaternion[1]=(dcm[2][1]- dcm[1][2])* s;
quaternion[2]=(dcm[0][2]- dcm[2][0])* s;
quaternion[3]=(dcm[1][0]- dcm[0][1])* s;
}else{/* Find maximum diagonal element in dcm
* store index in dcm_i */
int dcm_i =0;
int i;
for(i =1; i <3; i++){if(dcm[i][i]> dcm[dcm_i][dcm_i]){dcm_i = i;
}
}
intdcm_j =(dcm_i +1)%3;
intdcm_k =(dcm_i +2)%3;
floats = sqrtf((dcm[dcm_i][dcm_i]- dcm[dcm_j][dcm_j]-
dcm[dcm_k][dcm_k])+1.0f);
quaternion[dcm_i +1]= s *0.5f;
s =0.5f/ s;
quaternion[dcm_j +1]=(dcm[dcm_i][dcm_j]+ dcm[dcm_j][dcm_i])* s;
quaternion[dcm_k +1]=(dcm[dcm_k][dcm_i]+ dcm[dcm_i][dcm_k])* s;
quaternion[0]=(dcm[dcm_k][dcm_j]- dcm[dcm_j][dcm_k])* s;
}
}
更改后mavlink_conversions.h的代码
MAVLINK_HELPER void mavlink_dcm_to_quaternion(constfloat dcm[3][3],float quaternion[4])
{int dcm_j,dcm_k;
float s;
float tr = dcm[0][0]+ dcm[1][1]+ dcm[2][2];
if(tr >0.0f){float s = sqrtf(tr +1.0f);
quaternion[0]= s *0.5f;
s =0.5f/ s;
quaternion[1]=(dcm[2][1]- dcm[1][2])* s;
quaternion[2]=(dcm[0][2]- dcm[2][0])* s;
quaternion[3]=(dcm[1][0]- dcm[0][1])* s;
}else{/* Find maximum diagonal element in dcm
* store index in dcm_i */
int dcm_i =0;
int i;
for(i =1; i <3; i++){if(dcm[i][i]> dcm[dcm_i][dcm_i]){dcm_i = i;
}
}
dcm_j =(dcm_i +1)%3;
dcm_k =(dcm_i +2)%3;
s = sqrtf((dcm[dcm_i][dcm_i]- dcm[dcm_j][dcm_j]-
dcm[dcm_k][dcm_k])+1.0f);
quaternion[dcm_i +1]= s *0.5f;
s =0.5f/ s;
quaternion[dcm_j +1]=(dcm[dcm_i][dcm_j]+ dcm[dcm_j][dcm_i])* s;
quaternion[dcm_k +1]=(dcm[dcm_k][dcm_i]+ dcm[dcm_i][dcm_k])* s;
quaternion[0]=(dcm[dcm_k][dcm_j]- dcm[dcm_j][dcm_k])* s;
}
}
以前mavlink_helpers.h的代码
MAVLINK_HELPER uint16_t mavlink_msg_to_send_buffer(uint8_t*buffer,constmavlink_message_t*msg)
{memcpy(buffer,(constuint8_t*)&msg->magic, MAVLINK_NUM_HEADER_BYTES +(uint16_t)msg->len);
uint8_t*ck = buffer +(MAVLINK_NUM_HEADER_BYTES +(uint16_t)msg->len);
ck[0]=(uint8_t)(msg->checksum &0xFF);
ck[1]=(uint8_t)(msg->checksum >>8);
return MAVLINK_NUM_NON_PAYLOAD_BYTES +(uint16_t)msg->len;
}
更改后mavlink_helpers.h的代码
MAVLINK_HELPER uint16_t mavlink_msg_to_send_buffer(uint8_t*buffer,constmavlink_message_t*msg)
{uint8_t*ck;
memcpy(buffer,(constuint8_t*)&msg->magic, MAVLINK_NUM_HEADER_BYTES +(uint16_t)msg->len);
ck = buffer +(MAVLINK_NUM_HEADER_BYTES +(uint16_t)msg->len);
ck[0]=(uint8_t)(msg->checksum &0xFF);
ck[1]=(uint8_t)(msg->checksum >>8);
return MAVLINK_NUM_NON_PAYLOAD_BYTES +(uint16_t)msg->len;
}
编译后:
"..\OBJ\USART.axf" - 0 Error(s), 195 Warning(s).
解决所有警告的方法:
将protocol.h里面的旧代码
#define _MAV_RETURN_char(msg, wire_offset)(constchar)_MAV_PAYLOAD(msg)[wire_offset]
#define_MAV_RETURN_int8_t(msg, wire_offset)(constint8_t)_MAV_PAYLOAD(msg)[wire_offset]
#define_MAV_RETURN_uint8_t(msg, wire_offset)(constuint8_t)_MAV_PAYLOAD(msg)[wire_offset]
去掉const,改为
#define _MAV_RETURN_char(msg, wire_offset)(constchar)_MAV_PAYLOAD(msg)[wire_offset]
#define_MAV_RETURN_int8_t(msg, wire_offset)(int8_t)_MAV_PAYLOAD(msg)[wire_offset]
#define_MAV_RETURN_uint8_t(msg, wire_offset)(uint8_t)_MAV_PAYLOAD(msg)[wire_offset]
编译后:
"..\OBJ\USART.axf" - 0 Error(s), 0 Warning(s).
3开始更改底层串口代码
待续。。。
作者:恒久力行 QQ:624668529
这里有移植的完整教程,两个教程参考着看吧附上网址http://www.cnblogs.com/lovechen/p/5809709.html
来自为知笔记(Wiz)

相关文章推荐
- 模块加载(require)及定义(define)时的路径
- 内核定时器timer_list使用
- 【Java菜鸟 05】java中的 FileWriter类 和 FileReader类的一些基本用法
- 开始了第一次 就会有最后一次 也许你的第一次就是你的最后一次
- Android Studio 2.1.3 在gradle-experimental下编译使用OpenCV
- hdu 1232 畅通工程
- Web开发中一个完整的用户登陆(固化)
- B树、B-树、B+树、B*树
- 携程大数据实践:高并发应用架构及推荐系统案例
- css3浏览器前缀 -mos/-webkit/-o/-ms
- android 界面布局例子
- 166. Fraction to Recurring Decimal -- 将除法的商表示成字符串(循环节用括号表示)
- Java 初始化变量顺序的细节
- linux mail 命令 (收发邮件)
- <sdut-ACM>交叉排序
- Ubuntu14.04设置启动进入字符界面
- leetcode No109. Convert Sorted List to Binary Search Tree
- Rtrofit2源码解析
- Centos 7防火墙firewalld开放80端口
- 2015-2016 ACM-ICPC Northeastern European Regional Contest (NEERC 15)