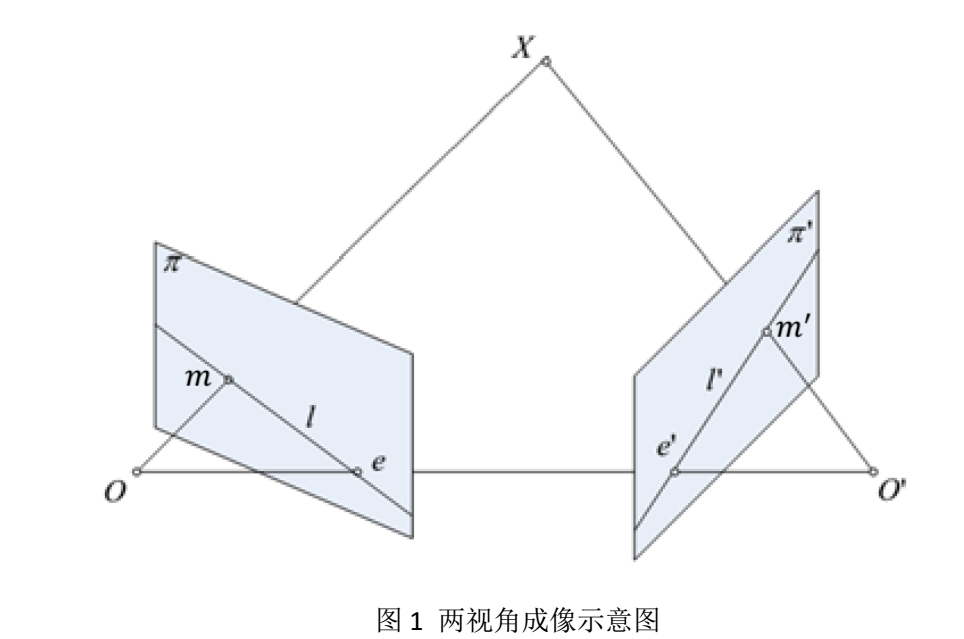
两视图基础矩阵和本质矩阵的最简单推导
2016-08-23 22:42
716 查看
由于所写公式为word中编辑中,上传图片形式。
对于向量的说明:
如果对两个向量做点乘以及叉乘操作时,如果需要将向量表示为坐标形式,应将两个向量放到同一个坐标系。

对于向量的说明:
如果对两个向量做点乘以及叉乘操作时,如果需要将向量表示为坐标形式,应将两个向量放到同一个坐标系。

相关文章推荐
- 计算机视觉基础5——本质矩阵与基本矩阵(Essential and Fundamental Matrices)
- 视图矩阵的推导
- 通过基础矩阵和本质矩阵恢复摄像机矩阵
- OpenGL取景变换(视图变换)矩阵推导
- 计算机视觉基础(三)——对极几何中的基本矩阵F和本质矩阵E
- [3D基础]投影矩阵的推导(1)
- 右手坐标系下LookAt视图矩阵的推导
- 基础矩阵、本质矩阵、单应性矩阵、透射变换、仿射变换
- 右手坐标系下LookAt视图矩阵的推导
- 计算机视觉基础5——本质矩阵与基本矩阵(Essential and Fundamental Matrices)
- OpenGL矩阵推导——模型视图变化
- kuangbin带你飞,矩阵(简单数学推导题)
- [3D基础]投影矩阵的推导
- 两个平行视图中间的基础矩阵是什么
- 本质矩阵和基础矩阵的区别是什么
- OpenGL矩阵推导——模型视图变化(转载需写明作者)
- 一、OpenGL灯光位置的控制 -- 模型视图矩阵的本质
- OpenGL: 视图矩阵的推导
- OpenGL矩阵推导——模型视图变化
- BP神经网络原理简单介绍以及公式推导(矩阵形式和分量形式)