双边滤波原理
2016-07-20 15:23
267 查看
双边滤波(bilateral
filter)是一种非线性滤波器,该算法结合空间信息和亮度相似性对图像进行滤波处理,在平滑滤波的同时能大量保留图像的边缘和细节特征。
定义如下:

在灰度变化平缓区域,值域滤波系数接近1,此时空域滤波起主要作用,双边滤波器退化为传统的高斯低通滤波器,对图像进行平滑操作。而在图像变化剧烈的部分(即图像边缘),像素间差异较大,值域滤波起主要作用,因而能保持边缘信息。
为了直观地了解高斯滤波与双边滤波的区别,我们可以从下列图示中看出依据。假设目标源图像为下述左右区域分明的带有噪声的图像(由程序自动生成),蓝色框的中心即为目标像素所在的位置,那么当前像素处所对应的高斯权重与双边权重因子3D可视化后的形状如后边两图所示:
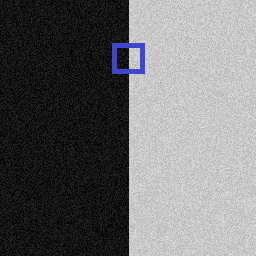
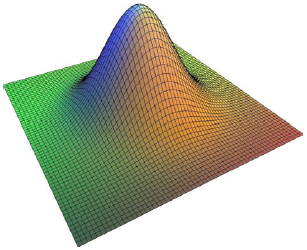
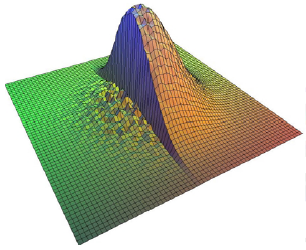
左图为原始的噪声图像;中间为高斯采样的权重;右图为Bilateral采样的权重。从图中可以看出Bilateral加入了相似程度分部以后可以将源图像左侧那些跟当前像素差值过大的点给滤去,这样就很好地保持了边缘。
filter)是一种非线性滤波器,该算法结合空间信息和亮度相似性对图像进行滤波处理,在平滑滤波的同时能大量保留图像的边缘和细节特征。
定义如下:
在灰度变化平缓区域,值域滤波系数接近1,此时空域滤波起主要作用,双边滤波器退化为传统的高斯低通滤波器,对图像进行平滑操作。而在图像变化剧烈的部分(即图像边缘),像素间差异较大,值域滤波起主要作用,因而能保持边缘信息。
为了直观地了解高斯滤波与双边滤波的区别,我们可以从下列图示中看出依据。假设目标源图像为下述左右区域分明的带有噪声的图像(由程序自动生成),蓝色框的中心即为目标像素所在的位置,那么当前像素处所对应的高斯权重与双边权重因子3D可视化后的形状如后边两图所示:
左图为原始的噪声图像;中间为高斯采样的权重;右图为Bilateral采样的权重。从图中可以看出Bilateral加入了相似程度分部以后可以将源图像左侧那些跟当前像素差值过大的点给滤去,这样就很好地保持了边缘。

相关文章推荐
- Maven为web项目同时打jar和war包,deploy时只上传jar包的配置
- php两个数字进行比较大小
- <C++略识>之浅拷贝与深拷贝
- ServletContext容器,网站访问量
- 使用Toolbar + DrawerLayou实现菜单侧滑,改变toolbar左上角图标
- 【Android基础知识】使用Http和HttpClient上传文件
- linux源码Makefile详解
- 把数组排成最小的数
- MySql数据库操作
- 《Hive编程指南》学习笔记
- 调皮的MFC(2)
- caffe学习(1):安装配置ubuntu14.04+cuda7.5+caffe+cudnn
- 多校&&HDU.5733 tetrahedron
- listView基本设置
- 使用Toolbar + DrawerLayou实现菜单侧滑,改变toolbar左上角图标
- Windows下设备GUID常识
- 94.大于屏幕宽度的TableView上下拉刷新实现 大于屏幕宽度MJRefresh怎么实现刷新控件显示居中
- Android开发中的waiting for debugger留下的坑
- Dom4j 中Node节点 和Element元素的区别
- 链表的各类操作