坐标旋转变换公式的推导
2016-07-13 11:13
218 查看
翻译自: http://www.metro-hs.ac.jp/rs/sinohara/zahyou_rot/zahyou_rotate.htm
翻译: 汤 永康
出处: http://blog.csdn.net/tangyongkang
转贴请注明出处
1 围绕原点的旋转
如下图, 在2维坐标上,有一点p(x, y) , 直线opの长度为r, 直线op和x轴的正向的夹角为a。 直线op围绕原点做逆时针方向b度的旋转,到达p’ (s,t)
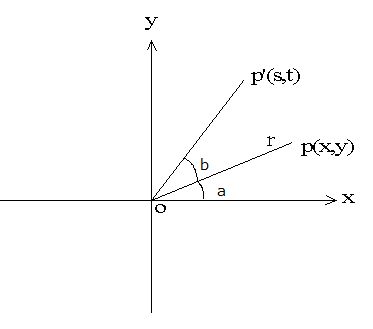
s = r cos(a + b) = r cos(a)cos(b) – r sin(a)sin(b) (1.1)
t = r sin(a + b) = r sin(a)cos(b) + r cos(a) sin(b) (1.2)
其中 x = r cos(a) , y = r sin(a)
代入(1.1), (1.2) ,
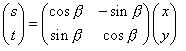
s = x cos(b) – y sin(b) (1.3)
t = x sin(b) + y cos(b) (1.4)
用行列式表达如下:
2.座标系的旋转
在原坐标系xoy中, 绕原点沿逆时针方向旋转theta度, 变成座标系 sot。
设有某点p,在原坐标系中的坐标为 (x, y), 旋转后的新坐标为(s, t)。
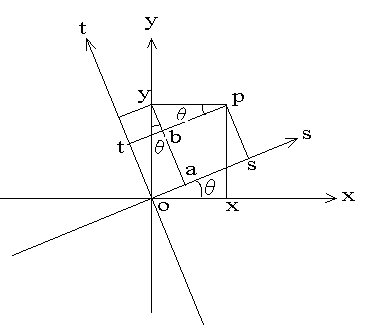
oa = y sin(theta) (2.1)
as = x cos(theta) (2.2)
综合(2.1),(2.2) 2式
s = os = oa + as = x cos(theta) + y sin(theta)
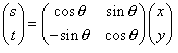
t = ot = ay – ab = y cos(theta) – x sin(theta)
用行列式表达如下:
转载于http://blog.csdn.net/tangyongkang/article/details/5484636
翻译: 汤 永康
出处: http://blog.csdn.net/tangyongkang
转贴请注明出处
1 围绕原点的旋转
如下图, 在2维坐标上,有一点p(x, y) , 直线opの长度为r, 直线op和x轴的正向的夹角为a。 直线op围绕原点做逆时针方向b度的旋转,到达p’ (s,t)
s = r cos(a + b) = r cos(a)cos(b) – r sin(a)sin(b) (1.1)
t = r sin(a + b) = r sin(a)cos(b) + r cos(a) sin(b) (1.2)
其中 x = r cos(a) , y = r sin(a)
代入(1.1), (1.2) ,
s = x cos(b) – y sin(b) (1.3)
t = x sin(b) + y cos(b) (1.4)
用行列式表达如下:
2.座标系的旋转
在原坐标系xoy中, 绕原点沿逆时针方向旋转theta度, 变成座标系 sot。
设有某点p,在原坐标系中的坐标为 (x, y), 旋转后的新坐标为(s, t)。
oa = y sin(theta) (2.1)
as = x cos(theta) (2.2)
综合(2.1),(2.2) 2式
s = os = oa + as = x cos(theta) + y sin(theta)
t = ot = ay – ab = y cos(theta) – x sin(theta)
用行列式表达如下:
转载于http://blog.csdn.net/tangyongkang/article/details/5484636

相关文章推荐
- Android Camera系统
- ACM 动态规划笔记
- 开源新闻速递:VirtualBox 5.1 发布
- Length of Last Word
- 【Mysql 调用存储过程,输出参数的坑】
- repositoryItemSearchLookUpEdit绑定数据源以及读取其中数据
- jquery计算出left和top,让一个div水平垂直居中的简单实例
- ubuntu--camera
- python 中文编码及显示问题
- MySQL sum()函数的一些注意点
- C中二进制方式读取写入文件简单实验
- Android Camera Framework Stream(一)
- MYSQL笔记二
- Microsoft VBScript 编译器错误 错误 '800a0409' 未结束的字符串常量
- 树 2016.8.23
- Oracle入门书籍推荐
- android:clipChildren属性的分析——是否剪裁子View
- 【noip】 华容道 搜索
- CentOS7 安装tomcat7.x为系统服务器 Systemctl管理Tomcat
- MongoDB安装