动态规划
2016-07-10 11:09
190 查看
星型结构的动态规划
图1.归一化的人脸图像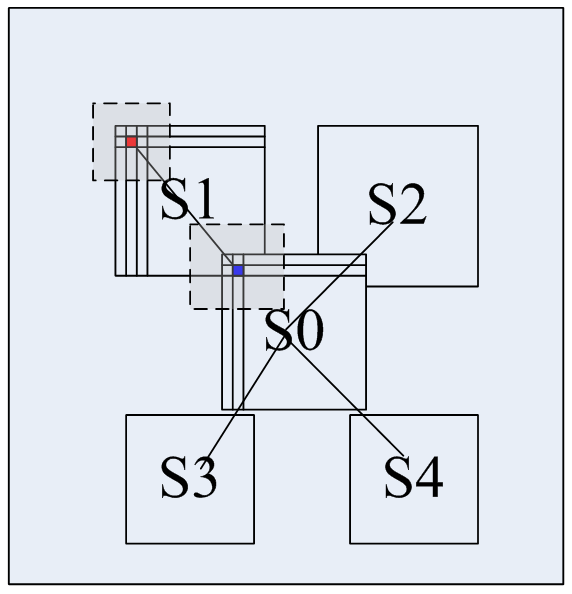
其中,S0,S1,S2,S3,S4分别是cen,lel,rer,ml,mr,(即中心,左眼眼角,右眼眼角和嘴左角,嘴右脚)是搜索空间。
红色的点和蓝色的点之间的连线称之为:spring,其外围的虚线边框是该特征点对应的patch.
动态规划问题:
注:下面S0−S4即表示搜索空间,又表示阶段。采用混合术语。
1阶段
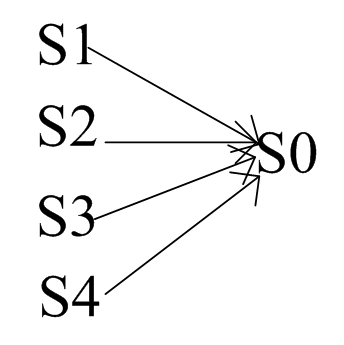
这里从S0,S1,S2,S3,S4可以看作1-5阶段。
2状态
第一个阶段S0的状态变量,即cener,或用s0表示,其状态变量的集合即为搜索空间,图中S0所标注的矩形区域。
3决策
状态变量lel取值为红色的位置时,其下一个阶段,可以选择蓝色的位置,或者蓝色的前一个位置。这表示决策。描述决策的变量称为决策变量。如从第二个S1阶段到第一个阶段S0决策的例子:
u1(lel=′红色位置′),可以看作是一个决策变量,其取值是整个S0区域。
编程时,通常定义一个决策数组,用来跟踪状态的变化,用来寻找达到最优时的最优策略。
4策略
各决策阶段组成的序列就是策略。我们的目的是根据一个”评价函数+准则”,找到最优的策略。
5状态转移方程
其描述了上一个阶段的状态sk和下一个阶段的状态sk+1,以及决策uk的关系,如上为:
sk+1=uk(sk)
6指标函数
即评价函数。即我们希望找到的5个landmarks满足,所有特征点的纹理匹配代价和形变代价最大。
纹理代价:
我们可以提取hog,sift,sparse_LBP,LBF等特征。在评价函数一般确认的情况下,纹理特征的描述和提取对于landmarks的定位很重要。学过模板匹配的都知道,当检测的区域的纹理特征和模板表示的特征相同时,可以达到最大的响应。
形变代价:
常用的代价是两个特征点之间的位移矢量的二次函数,则两个特征点之间的形变代价为:。
f((xi,yi),(xj,yj))=a(dx)2+b(dx)+c(dy)2+d(dy)(2)
其中a,b,c,d是在训练时,需要学习的模型参数。
在模型的学习过程中,我们只要约束二次函数的二次项的系数全负,我们就可以利用广义距离变换加速动态规划的求解。
辅助理解:
文献1中,公式(3)Shapem(L)=∑ij∈Emamijdx2+b2ij+cmijdy2+cmijdy2+dmijdy(3)
其中m表示component 或者viewPoint或者mixture,即视角
ij∈Em表示i,j相连。
上述公式转换为公式(4):
Shapem(L)=−(L−μm)TΛm(L−μm)+constant(4)
其中(μ,Λ)是形状参数(a,b,c,d)重新参数化的表示。其类似于一个高斯分布。其中Λm是一个sparse precision matrix,即其中的非0项对应于Em中相连的两个部分i,j。[34]给出,当二次函数的a,c两个系数是负的时,矩阵Λm是正定的。μm可以看作是理想的形状。Λm小的特征值对应的特征向量表示带有小惩罚的“形变模式 deformation mode”。
个人理解:当Λm正定时,则:
−(L−μm)TΛm(L−μm)<0
同时公式(2)对于二次是一个抛物面,开口向下的抛物面。其正迎合了广义距离变换的求解。
评价函数:
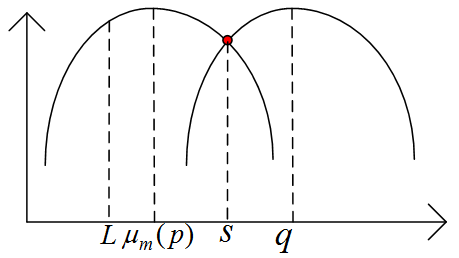
f(L)=App(L)+Shape(L)
我们希望评价函数值越大越好,对于纹理,越匹配,则App(L)值越大。对于Shape(L)也是约匹配的时候越大。(下图,抛物线画的不标准,广义距离变换在求解时,需要两个抛物线的交点只有一个。我们将形变和广义距离变换画在同一个图上了,其中L表示当前形状,μm表示理想的形状,p,q表示一维网格,其对应图中的两个抛物线,S是两个抛物线的交点。)
1.欧式距离的广义距离变换:
给定G={0,...,n−1}×{0,...,m−1}是一个二维的网格,并且f:G→R是网格上的任意函数。函数f的二维距离变换(在平方欧式距离下)给出:Df(x,y)=minx′,y′((x−x′)2+(y−y′)2+f(x′,y′))(5)
这里,(x,y)和(x′,y′)在同样的网格上。
和多元函数求解积分类似,由于公式(5)中的第一项不含有y′,那么我们可以对公式(5),先对y′最小化,或者先对x′最小化:
先对y′:
Df(x,y)=miny′((y−y′)2+minx′((x−x′)2+f(x′,y′))
=miny′((y−y′)2+Df|y′(x))(6)
先对x′:
Df(x,y)=minx′((x−x′)2+miny′((y−y′)2+f(x′,y′))
=minx′((x−x′)2+Df|x′(y))(7)
说明:例如上式,先对将x′看成常数,对y′进行最小化、
2.任意二次形变函数的广义距离变换:
公式(3)中,我们针对某两个相邻的landmarks,如果从Vi→Vj,我们称Vi为孩子,Vj为父亲,进行动态规划求解,即形如公式(2)那样:f(xj,yj)=maxxi,yi(f(xi,yi)+f((xi,yi),(xj,yj)))=maxxi,yi(a(dx)2+b(dx)+c(dy)2+d(dy)+f(xi,yi))(8)
其中f(xi,yi)表示孩子基准点匹配的纹理代价,f((xi,yi),(xj,yj))表示两个基准点之间的形变代价。
同理,我们也可以转换为一维广义距离变换:
f(xj,yj)=maxxi(a(dx)2+b(dx)+maxyi(c(dy)2+d(dy)+f(xi,yi)))(9)
即:
f(xj,yj)=maxxi(a(dx)2+b(dx)+maxyi(c(dy)2+d(dy)+f(xi,yi)))(10)
其实现过程中,只需要修改交叉点s的计算,以及Df(xj,yj)的计算。
在图1中的S1→S0的动态规划的计算,可以将搜索区域S1和S0都映射到从1(for matlab)或者从0(for C)开始的位置,即通过减去各搜索区域的左上角位置。然后直接利用文献2中的一维广义距离变换求解。
算法复杂度的分析:
常规遍历算法的时间复杂度:
针对图1中S1和S0,我们假设S1区域大小为h1×w1,S0的搜索区域为h0×w0,则外循环次数为h0×w0,内循环次数为h1×w1,则时间复杂度为:
O(h1×w1×h0×w0)
广义距离变换的时间复杂度:
1.计算下包络(lower envelope或上包络)时间复杂度为:h1×w12.填充值(查找表)时间复杂度为:h0×w0
故总的时间复杂度为:
O(h1×w1+h0×w0)
参考文献:
1、Face Detection, Pose Estimation, and Landmark Localization in the Wild2、Distance Transforms of Sampled Functions(广义距离变换)

相关文章推荐
- hdu 5084 HeHe(暴力/找规律)
- InputStreamReader 和 OutputStreamWriter类用法简介,及演示。
- APP开发流程实例讲解-儒释道网络电台八天开发全程-签名发布
- C++primer(5th)第三章总结(string)
- ORACLE window10下卸载
- checkbox全选-取消-再全选没有显示问题
- MySQL存储过程详解 mysql 存储过程(转载)
- C#写的工厂抽象模式
- redis 配置开机启动
- python学习——map/reduce
- Eclipse Neon Java EE IDE 安装配置指南
- ios-Cell 的层级关系
- ORM
- [转]图片中的字符分割提取(基于opencv)
- VMware与VirtualBox相互转换
- Android 四大组件之BroadcastReceiver 广播
- 【MyBatis框架】mybatis和spring整合
- 分治法-数组中出现次数超过一半的数字
- 对input设置height在非ie浏览器下失效
- js重写方法的简单实现