机电传动控制——直流电机调速仿真实验
2016-06-16 01:51
169 查看
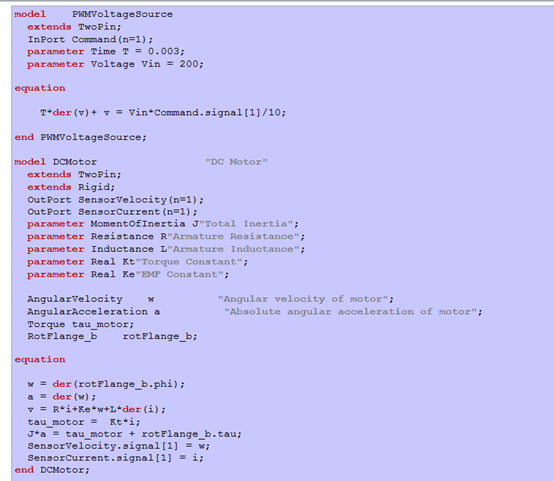
1.直流电机模型

2.PID调节参数的作用:
1.比例系数Kp的作用是加快系统的响应速度,提高系统的调节精度。
2.积分作用系数Ki的作用是消除系统的稳态误差。
3.微分系数Kd的作用是改善系统的动态特性。
3. 控制函数controller的编写
调试KP,TI,TD的值
Kp=2.5 ti=1.2 td=0.31

4.仿真结果

上升时间 tp=0.0282
无超调
2.PID调节参数的作用:
1.比例系数Kp的作用是加快系统的响应速度,提高系统的调节精度。
2.积分作用系数Ki的作用是消除系统的稳态误差。
3.微分系数Kd的作用是改善系统的动态特性。
3. 控制函数controller的编写
调试KP,TI,TD的值
Kp=2.5 ti=1.2 td=0.31
4.仿真结果
上升时间 tp=0.0282
无超调

相关文章推荐
- 作业九:报告及总结
- iOS--UIButton图片在上,文字在下
- iOS--UIButton图片在上,文字在下
- JFinal集成Beetl静态模板
- 【揭密:刘强东9年密谋的商业布局—京东快物流背后的核心技术盘点】
- Android的OkHttp开源框架的使用方法
- iOS--对接soap协议接口
- iOS--对接soap协议接口
- 展望10年内VR技术的盈利模式的发展历程
- AndroidStudio打包全攻略---Gradle-Build Variants构建定制版App
- Ubuntu 16.04 下修改免安裝版tomcat的內存大小
- os名词解释
- leetcode之Triangle
- Rserve资料-01
- Verify Preorder Serialization of a Binary Tree
- Eclipse下NDK开发
- 作业九:《软件工程》课程的总结
- perl中->和=>作用
- MySQL.zip安装及初始化
- 确认(confirm 消息对话框)