ROS_Kinetic_01 在 Ubuntu 16.04 安装ROS Kinetic 全教程附资料和镜像 2018.02.02更新
2016-05-10 17:55
1046 查看
ROS_Kinetic系列学习(一)
在ubuntu 16.04安装ROS Kinetic
资料汇总下载地址:http://download.csdn.net/album/detail/4431Celebrating 10 Years of ROS! ~~ROSⅩ年庆祝~~ ;-)
通过网页快速了解Linux(Ubuntu)和ROS机器人操作系统,请参考实验楼在线系统如下:初级教程可参考:https://www.shiyanlou.com/courses/854 邀请码:U23ERF8H中级教程可参考:https://www.shiyanlou.com/courses/938 邀请码:U9SVZMKH
纯净定制版镜像已经发布,供ROS爱好者交流学习,在如下链接:http://blog.csdn.net/zhangrelay/article/details/54632130
Ubuntu 16.04 + ROS Kinetic 机器人操作系统学习镜像分享与使用安装说明
ubuntu16.04已经发布半年多了,ROS的Kinetic版本功能包也越来越丰富了,需要了解ROS发行版及支持维护的时间等,
可以参考如下网页:http://wiki.ros.org/Distributions
+

ubuntu 16.04对中文支持很好,直接支持中文输入,使用体验不错。
1. ubuntu 16.04安装与使用
安装镜像下载地址:http://www.ubuntu.com/download/desktop下载后,使用U盘启动安装,安装后设置更新源等,并配置常用的应用。

镜像选择:

2. ROS kinetic安装与使用
参考的网址:http://wiki.ros.org/kinetic:http://wiki.ros.org/kinetic/Installation/Ubuntu
爲了保證安裝速度,請選擇國內鏡像如下:ustc鏡像
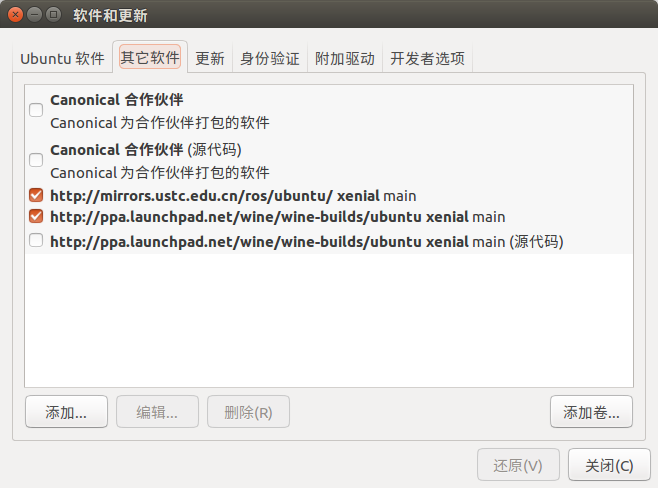
2.1 设置安装源
ROS Kinetic只支持Wily(15.10)和Xenial(16.04)对应内核分别为4.2和4.4,其他版本需要编译安装不支持直接deb软件源安装,使用下面命令:
~$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'

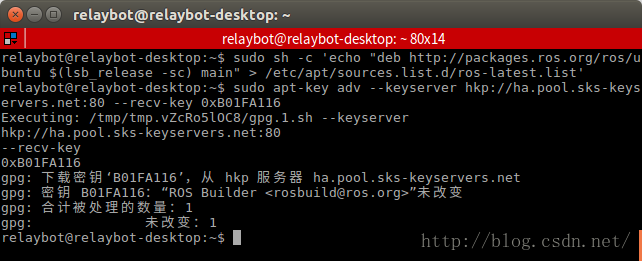
2.2 设置keys
~$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116Executing: /tmp/tmp.vZcRo5lOC8/gpg.1.sh --keyserver
hkp://ha.pool.sks-keyservers.net:80
--recv-key
0xB01FA116
2.3 安装
~$ sudo apt-get update~$ sudo apt-get install ros-kinetic-desktop-full
安装功能包:
~$ sudo apt-get install ros-kinetic-PACKAGE
例如:
~$ sudo apt-get install ros-kinetic-slam-gmapping
查找在kinetic中可以使用的功能包:
~$ apt-cache search ros-kinetic
2.4 初始化
~$ sudo rosdep initWrote /etc/ros/rosdep/sources.list.d/20-default.list
Recommended: please run
rosdep update
~$ rosdep update
reading in sources list data from /etc/ros/rosdep/sources.list.d
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml Hit https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml Query rosdistro index https://raw.githubusercontent.com/ros/rosdistro/master/index.yaml Add distro "groovy"
Add distro "hydro"
Add distro "indigo"
Add distro "jade"
Add distro "kinetic"
updated cache in /home/relaybot/.ros/rosdep/sources.cache
2.5 环境配置
~$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc~$ source ~/.bashrc
注意当安装多个ROS发行版,使用kinetic需要用到下面命令:
~$ source /opt/ros/kinetic/setup.bash
2.6 安装rosinstall
~$ sudo apt-get install python-rosinstall2.7 测试roscore
~$ roscore
有兴趣也可以测试一下小海归的例子。
-End-

相关文章推荐
- javax.validation.ValidationException: HV000183: Unable to load 'javax.el.ExpressionFactory'
- ROS_Kinetic_01 在ubuntu 16.04安装ROS Kinetic 2017.01更新
- ROS_Kinetic_01 在 Ubuntu 16.04 安装ROS Kinetic 全教程附资料和镜像 2017.02.15更新
- javax.validation.ValidationException: HV000183: Unable to load 'javax.el.ExpressionFactory'
- 八大排序算法
- iOS UIWindow,UIApplication类中的属性介绍
- Android 中String的小秘密
- 数据持久化其实很简单 【上】(精华)
- C++作业5
- linux 性能优化
- 上拉加载,下拉刷新
- Unreal Engine 4 —— 适用于FPS游戏的勾边后期效果
- IE7下z-index失效问题
- 快速安装服务
- 位操作相关资料汇总
- oracle 执行包含update语句的存储过程并获取结果记录
- (OK) IMUNES—Docker—Fedora23
- SPI中的极性CPOL和相位CPHA是什么以及如何设置
- 第十一周时间项目(5)——d
- 文章标题