红外遥控系统原理附51单片机软件解码程序
2016-04-11 00:36
316 查看
红外接收头的型号有很多HS0038 VS838等 功能大致相同,只是引脚封装不同。
红外接收有几种统一的编码方式,采样哪种编码方式取决于遥控器使用的芯片,接收头收到的都是一样的。
电视遥控器使用的是专用集成发射芯片来实现遥控码的发射,如东芝TC9012,飞利浦AA3010T等,通常彩电遥控信号的发射,就是将某个按键所对应的控制指令和系统码(由0和1组成的序列),调制在38KHz的载波上,然后经放大、驱动红外发射管将信号发射出去。不同公司的遥控芯片,采样的遥控码格式也不一样,较普遍的有两种,一种NEC标准,一种是PHILIPS标准。
NEC标准:遥控载波的频率为38KHz(占空比1:3)当某个键按下时,系统首先发射一个完整的全码,如果按键超过108ms仍未松开,接下来发射的代码(连发代码)将由起始码(9ms)和结束码(2.5ms)组成。
一个完整的全码 = 引导码 +用户码 +用户码 + 数据码 + 数据码 + 数据反码。
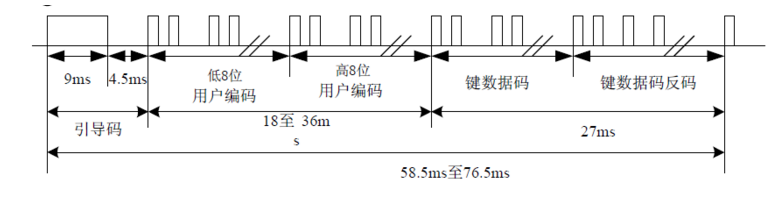
其中,引导码高电平9ms,低电平4.5ms;系统码8位,数据码8位,共32位;其中前16位为用户识别码,能区别不同的红外遥控设备,以防止不同的机种遥控码互相干扰。后16位为8位的操作码和8位的操作反码,用于核对数据是否接收准确。收端根据数据码做出应该执行上面动作的判断。
连发代码是在持续按键时发送的码。它告知接收端。某键是在被连续的按着。
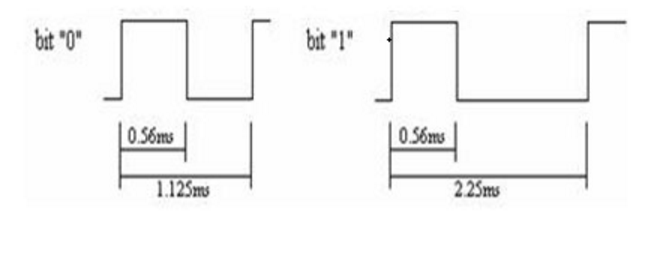
NEC标准下的发射码表示
发射数据0时用”0.56ms高电平 + 0.565ms低电平 = 1.125ms”表示;
数据1用”高电平0.56ms + 1.69ms = 2.25ms”表示。
遥控器发射信号:
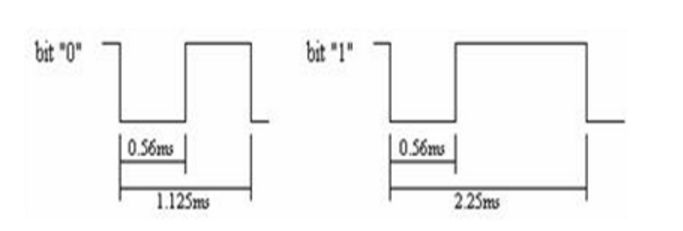
需要注意的是:当一体化接收头收到38kHz红外信号时,输出端输出低电平,否则为高电平。所以一体化接收头输出的波形和发射波形是反向的
PHILIPS标准:
载波频率38KHz:没有筒,点按键时,控制码1和0之间切换,若持续按键,则控制码不变。
一个全码 = 起始码’11’ +控制码 + 用户码 + 用户码
数据0用“低电平1.778ms + 高电平1.778ms”表示;
数据1用“高电平1.778ms + 低电平1.778ms”表示。
连续码重复延时114ms。
所谓的解码就是一个区分脉冲宽度的过程。红矮信号的0和1是通过脉冲持续时间的长短来区分的,
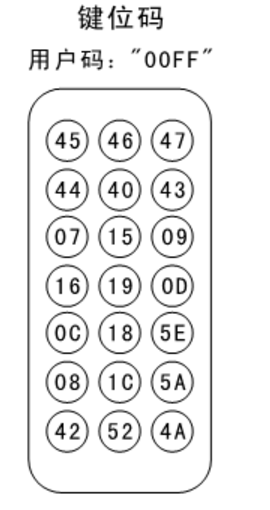
我的遥控器使用的是NEC标准的WD6122芯片,遥控器编码如下:
以下是我用1602显示红外接收头接收到编码的程序:
①这个是对1602操作的函数
②延时函数
③以下是主函数
红外接收有几种统一的编码方式,采样哪种编码方式取决于遥控器使用的芯片,接收头收到的都是一样的。
电视遥控器使用的是专用集成发射芯片来实现遥控码的发射,如东芝TC9012,飞利浦AA3010T等,通常彩电遥控信号的发射,就是将某个按键所对应的控制指令和系统码(由0和1组成的序列),调制在38KHz的载波上,然后经放大、驱动红外发射管将信号发射出去。不同公司的遥控芯片,采样的遥控码格式也不一样,较普遍的有两种,一种NEC标准,一种是PHILIPS标准。
NEC标准:遥控载波的频率为38KHz(占空比1:3)当某个键按下时,系统首先发射一个完整的全码,如果按键超过108ms仍未松开,接下来发射的代码(连发代码)将由起始码(9ms)和结束码(2.5ms)组成。
一个完整的全码 = 引导码 +用户码 +用户码 + 数据码 + 数据码 + 数据反码。
其中,引导码高电平9ms,低电平4.5ms;系统码8位,数据码8位,共32位;其中前16位为用户识别码,能区别不同的红外遥控设备,以防止不同的机种遥控码互相干扰。后16位为8位的操作码和8位的操作反码,用于核对数据是否接收准确。收端根据数据码做出应该执行上面动作的判断。
连发代码是在持续按键时发送的码。它告知接收端。某键是在被连续的按着。
NEC标准下的发射码表示
发射数据0时用”0.56ms高电平 + 0.565ms低电平 = 1.125ms”表示;
数据1用”高电平0.56ms + 1.69ms = 2.25ms”表示。
遥控器发射信号:
需要注意的是:当一体化接收头收到38kHz红外信号时,输出端输出低电平,否则为高电平。所以一体化接收头输出的波形和发射波形是反向的
PHILIPS标准:
载波频率38KHz:没有筒,点按键时,控制码1和0之间切换,若持续按键,则控制码不变。
一个全码 = 起始码’11’ +控制码 + 用户码 + 用户码
数据0用“低电平1.778ms + 高电平1.778ms”表示;
数据1用“高电平1.778ms + 低电平1.778ms”表示。
连续码重复延时114ms。
所谓的解码就是一个区分脉冲宽度的过程。红矮信号的0和1是通过脉冲持续时间的长短来区分的,
我的遥控器使用的是NEC标准的WD6122芯片,遥控器编码如下:
以下是我用1602显示红外接收头接收到编码的程序:
①这个是对1602操作的函数
------------------------------------------------*/
#include "1602.h"
#include "delay.h"
#define CHECK_BUSY
sbit RS = P2^4; //定义端口
sbit RW = P2^5;
sbit EN = P2^6;
#define RS_CLR RS=0
#define RS_SET RS=1
#define RW_CLR RW=0
#define RW_SET RW=1
#define EN_CLR EN=0
#define EN_SET EN=1
#define DataPort P0
/*------------------------------------------------
判忙函数
------------------------------------------------*/
bit LCD_Check_Busy(void)
{
#ifdef CHECK_BUSY
DataPort= 0xFF;
RS_CLR;
RW_SET;
EN_CLR;
_nop_();
EN_SET;
return (bit)(DataPort & 0x80);
#else
return 0;
#endif
}
/*------------------------------------------------
写入命令函数
------------------------------------------------*/
void LCD_Write_Com(unsigned char com)
{
// while(LCD_Check_Busy()); //忙则等待
DelayMs(5);
RS_CLR;
RW_CLR;
EN_SET;
DataPort= com;
_nop_();
EN_CLR;
}
/*------------------------------------------------
写入数据函数
------------------------------------------------*/
void LCD_Write_Data(unsigned char Data)
{
//while(LCD_Check_Busy()); //忙则等待
DelayMs(5);
RS_SET;
RW_CLR;
EN_SET;
DataPort= Data;
_nop_();
EN_CLR;
}
/*------------------------------------------------
清屏函数
------------------------------------------------*/
void LCD_Clear(void)
{
LCD_Write_Com(0x01);
DelayMs(5);
}
/*------------------------------------------------
写入字符串函数
------------------------------------------------*/
void LCD_Write_String(unsigned char x,unsigned char y,unsigned char *s)
{
if (y == 0)
{
LCD_Write_Com(0x80 + x); //表示第一行
}
else
{
LCD_Write_Com(0xC0 + x); //表示第二行
}
while (*s)
{
LCD_Write_Data( *s);
s ++;
}
}
/*------------------------------------------------
写入字符函数
------------------------------------------------*/
/* void LCD_Write_Char(unsigned char x,unsigned char y,unsigned char Data)
{
if (y == 0)
{
LCD_Write_Com(0x80 + x);
}
else
{
LCD_Write_Com(0xC0 + x);
}
LCD_Write_Data( Data);
}*/
/*------------------------------------------------
初始化函数
------------------------------------------------*/
void LCD_Init(void)
{
LCD_Write_Com(0x38); /*显示模式设置*/
DelayMs(5);
LCD_Write_Com(0x38);
DelayMs(5);
LCD_Write_Com(0x38);
DelayMs(5);
LCD_Write_Com(0x38);
LCD_Write_Com(0x08); /*显示关闭*/
LCD_Write_Com(0x01); /*显示清屏*/
LCD_Write_Com(0x06); /*显示光标移动设置*/
DelayMs(5);
LCD_Write_Com(0x0C); /*显示开及光标设置*/
}②延时函数
#include "delay.h"
/*------------------------------------------------
uS延时函数,含有输入参数 unsigned char t,无返回值
unsigned char 是定义无符号字符变量,其值的范围是
0~255 这里使用晶振12M,精确延时请使用汇编,大致延时
长度如下 T=tx2+5 uS
------------------------------------------------*/
void DelayUs2x(unsigned char t)
{
while(--t);
}
/*------------------------------------------------
mS延时函数,含有输入参数 unsigned char t,无返回值
unsigned char 是定义无符号字符变量,其值的范围是
0~255 这里使用晶振12M,精确延时请使用汇编
------------------------------------------------*/
void DelayMs(unsigned char t)
{
while(t--)
{
//大致延时1mS
DelayUs2x(245);
DelayUs2x(245);
}
}③以下是主函数
#include<reg52.h> //包含头文件,一般情况不需要改动,头文件包含特殊功能寄存器的定义
#include"1602.h"
#include"delay.h"
sbit IR=P3^2; //红外接口标志
char code Tab[16]="0123456789ABCDEF";
/*------------------------------------------------
全局变量声明
------------------------------------------------*/
unsigned char irtime;//红外用全局变量
bit irpro_ok,irok;
unsigned char IRcord[4];
unsigned char irdata[33];
unsigned char TempData[16];
/*------------------------------------------------
函数声明
------------------------------------------------*/
void Ir_work(void);
void Ircordpro(void);
/*------------------------------------------------
定时器0中断处理
------------------------------------------------*/
void tim0_isr (void) interrupt 1 using 1
{
irtime++; //用于计数2个下降沿之间的时间
}
/*------------------------------------------------
外部中断0中断处理
------------------------------------------------*/
void EX0_ISR (void) interrupt 0 //外部中断0服务函数
{
static unsigned char i; //接收红外信号处理
static bit startflag; //是否开始处理标志位
if(startflag)
{
if(irtime<63&&irtime>=33)//引导码 TC9012的头码,9ms+4.5ms
i=0;
irdata[i]=irtime;//存储每个电平的持续时间,用于以后判断是0还是1
irtime=0;
i++;
if(i==33)
{
irok=1;
i=0;
}
}
else
{
irtime=0;
startflag=1;
}
}
/*------------------------------------------------
定时器0初始化
------------------------------------------------*/
void TIM0init(void)//定时器0初始化
{
TMOD=0x02;//定时器0工作方式2,TH0是重装值,TL0是初值
TH0=0x00; //重载值
TL0=0x00; //初始化值
ET0=1; //开中断
TR0=1;
}
/*------------------------------------------------
外部中断0初始化
------------------------------------------------*/
void EX0init(void)
{
IT0 = 1; //指定外部中断0下降沿触发,INT0 (P3.2)
EX0 = 1; //使能外部中断
EA = 1; //开总中断
}
/*------------------------------------------------
键值处理
------------------------------------------------*/
void Ir_work(void)
{
TempData[0] = Tab[IRcord[0]/16]; //处理客户码
TempData[1] = Tab[IRcord[0]%16];
TempData[2] = '-';
TempData[3] = Tab[IRcord[1]/16]; //处理客户码
TempData[4] = Tab[IRcord[1]%16];
TempData[5] = '-';
TempData[6] = Tab[IRcord[2]/16]; //处理数据码
TempData[7] = Tab[IRcord[2]%16];
TempData[8] = '-';
TempData[9] = Tab[IRcord[3]/16]; //处理数据反码
TempData[10] = Tab[IRcord[3]%16];
LCD_Write_String(5,1,TempData);
irpro_ok=0;//处理完成标志
}
/*------------------------------------------------
红外码值处理
------------------------------------------------*/
void Ircordpro(void)//红外码值处理函数
{
unsigned char i, j, k;
unsigned char cord,value;
k=1;
for(i=0;i<4;i++) //处理4个字节
{
for(j=1;j<=8;j++) //处理1个字节8位
{
cord=irdata[k];
if(cord>7)//大于某值为1,这个和晶振有绝对关系,这里使用12M计算,此值可以有一定误差
value|=0x80;
if(j<8)
{
value>>=1;
}
k++;
}
IRcord[i]=value;
value=0;
}
irpro_ok=1;//处理完毕标志位置1
}
/*------------------------------------------------
主函数
------------------------------------------------*/
void main(void)
{
EX0init(); //初始化外部中断
TIM0init(); //初始化定时器
LCD_Init(); //初始化液晶
DelayMs(20); //延时有助于稳定
LCD_Clear(); //清屏
LCD_Write_String(0,0,"www.doflye.net");
LCD_Write_String(0,1,"Code:");
while(1)//主循环
{
if(irok) //如果接收好了进行红外处理
{
Ircordpro();
irok=0;
}
if(irpro_ok) //如果处理好后进行工作处理,如按对应的按键后显示对应的数字等
{
Ir_work();
}
}
}

相关文章推荐
- 阿里巴巴发布第一颗自研芯片,全球最强 AI 芯片含光 800
- dell笔记本维修-芯片级-技巧
- ASP编码必备的8条原则
- XML指南——XML编码
- C#中字符串编码处理
- ExtJS中文乱码之GBK格式编码解决方案及代码
- 程序员趣味读物 谈谈Unicode编码
- 文本文件编码方式区别
- C语言安全编码之数值中的sizeof操作符
- C#实现获取文本文件的编码的一个类(区分GB2312和UTF8)
- VC中BASE64编码和解码使用详解
- 计算机中的字符串编码、乱码、BOM等问题详解
- Base64编码解码原理及C#编程实例
- C#编码好习惯小结
- javascript编码的几个方法详细介绍
- UTF8编码开发中页面空白问题的解决方法
- php生成固定长度纯数字编码的方法
- 重新restore了mysql到另一台机器上后mysql 编码问题报错
- c# Base64编码和图片的互相转换代码
- java自动根据文件内容的编码来读取避免乱码