OpenCV定制化创建角点检测子
2016-03-18 15:18
597 查看
定制化创建角点检测子
目标
在这个教程中我们将涉及:使用 OpenCV 函数 cornerEigenValsAndVecs 来计算像素对应的本征值和本征向量来确定其是否是角点。
使用OpenCV 函数 cornerMinEigenVal 通过最小化本征值来进行角点检测。
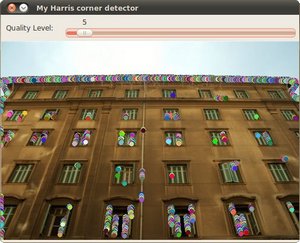
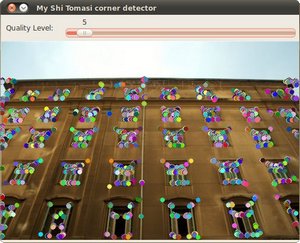
用上述两个函数实现一个定制化的Harris detector,类似Shi-Tomasi检测子。
解释
代码
这个教程的代码如下所示。源代码还可以从 这个链接下载得到#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
#include <stdio.h>
#include <stdlib.h>
using namespace cv;
using namespace std;
/// Global variables
Mat src, src_gray;
Mat myHarris_dst; Mat myHarris_copy; Mat Mc;
Mat myShiTomasi_dst; Mat myShiTomasi_copy;
int myShiTomasi_qualityLevel = 50;
int myHarris_qualityLevel = 50;
int max_qualityLevel = 100;
double myHarris_minVal; double myHarris_maxVal;
double myShiTomasi_minVal; double myShiTomasi_maxVal;
RNG rng(12345);
char* myHarris_window = "My Harris corner detector";
char* myShiTomasi_window = "My Shi Tomasi corner detector";
/// Function headers
void myShiTomasi_function( int, void* );
void myHarris_function( int, void* );
/** @function main */
int main( int argc, char** argv )
{
/// Load source image and convert it to gray
src = imread( argv[1], 1 );
cvtColor( src, src_gray, CV_BGR2GRAY );
/// Set some parameters
int blockSize = 3; int apertureSize = 3;
/// My Harris matrix -- Using cornerEigenValsAndVecs
myHarris_dst = Mat::zeros( src_gray.size(), CV_32FC(6) );
Mc = Mat::zeros( src_gray.size(), CV_32FC1 );
cornerEigenValsAndVecs( src_gray, myHarris_dst, blockSize, apertureSize, BORDER_DEFAULT );
/* calculate Mc */
for( int j = 0; j < src_gray.rows; j++ )
{ for( int i = 0; i < src_gray.cols; i++ )
{
float lambda_1 = myHarris_dst.at<float>( j, i, 0 );
float lambda_2 = myHarris_dst.at<float>( j, i, 1 );
Mc.at<float>(j,i) = lambda_1*lambda_2 - 0.04*pow( ( lambda_1 + lambda_2 ), 2 );
}
}
minMaxLoc( Mc, &myHarris_minVal, &myHarris_maxVal, 0, 0, Mat() );
/* Create Window and Trackbar */
namedWindow( myHarris_window, CV_WINDOW_AUTOSIZE );
createTrackbar( " Quality Level:", myHarris_window, &myHarris_qualityLevel, max_qualityLevel,
myHarris_function );
myHarris_function( 0, 0 );
/// My Shi-Tomasi -- Using cornerMinEigenVal
myShiTomasi_dst = Mat::zeros( src_gray.size(), CV_32FC1 );
cornerMinEigenVal( src_gray, myShiTomasi_dst, blockSize, apertureSize, BORDER_DEFAULT );
minMaxLoc( myShiTomasi_dst, &myShiTomasi_minVal, &myShiTomasi_maxVal, 0, 0, Mat() );
/* Create Window and Trackbar */
namedWindow( myShiTomasi_window, CV_WINDOW_AUTOSIZE );
createTrackbar( " Quality Level:", myShiTomasi_window, &myShiTomasi_qualityLevel, max_qualityLevel,
myShiTomasi_function );
myShiTomasi_function( 0, 0 );
waitKey(0);
return(0);
}
/** @function myShiTomasi_function */
void myShiTomasi_function( int, void* )
{
myShiTomasi_copy = src.clone();
if( myShiTomasi_qualityLevel < 1 ) { myShiTomasi_qualityLevel = 1; }
for( int j = 0; j < src_gray.rows; j++ )
{ for( int i = 0; i < src_gray.cols; i++ )
{
if( myShiTomasi_dst.at<float>(j,i) > myShiTomasi_minVal + ( myShiTomasi_maxVal -
myShiTomasi_minVal )*myShiTomasi_qualityLevel/max_qualityLevel )
{ circle( myShiTomasi_copy, Point(i,j), 4, Scalar( rng.uniform(0,255),
rng.uniform(0,255), rng.uniform(0,255) ), -1, 8, 0 ); }
}
}
imshow( myShiTomasi_window, myShiTomasi_copy );
}
/** @function myHarris_function */
void myHarris_function( int, void* )
{
myHarris_copy = src.clone();
if( myHarris_qualityLevel < 1 ) { myHarris_qualityLevel = 1; }
for( int j = 0; j < src_gray.rows; j++ )
{ for( int i = 0; i < src_gray.cols; i++ )
{
if( Mc.at<float>(j,i) > myHarris_minVal + ( myHarris_maxVal - myHarris_minVal )
*myHarris_qualityLevel/max_qualityLevel )
{ circle( myHarris_copy, Point(i,j), 4, Scalar( rng.uniform(0,255), rng.uniform(0,255),
rng.uniform(0,255) ), -1, 8, 0 ); }
}
}
imshow( myHarris_window, myHarris_copy );
}解释
结果
翻译者
Shuai Zheng, <kylezheng04@gmail.com>, http://www.cbsr.ia.ac.cn/users/szheng/from: http://www.opencv.org.cn/opencvdoc/2.3.2/html/doc/tutorials/features2d/trackingmotion/generic_corner_detector/generic_corner_detector.html#generic-corner-detector

相关文章推荐
- 基于Docker的CaaS容器云平台架构设计
- OpenCV Shi-Tomasi角点检测子
- 技术架构的关注点
- OpenCV Harris 角点检测子
- 网站服务器选择windows主机好还是linux主机好
- Lynis:linux系统安全检查工具
- 使用structs2开源框架+tomcat开源服务+mysql开源数据库+微信开放接口构建考务信息推送平台
- linux
- PropertyChangeSupport类
- OpenCV 特征点检测
- TN21 命令与消息传递
- OpenCV Harris 角点检测子
- 用自动化运维工具解放IT运维
- sed 引入shell变量
- linux的nohup命令的用法
- Linux命令学习总结: file命令
- GNU/Linux 体系结构
- 关于下拉框select和option默认值选定
- linux下QTE环境搭建
- centos 死活安装不上 libxml