[ROS]3 Linux编程练习
2016-01-20 16:45
555 查看
一起做RGB-SLAM(2)实验
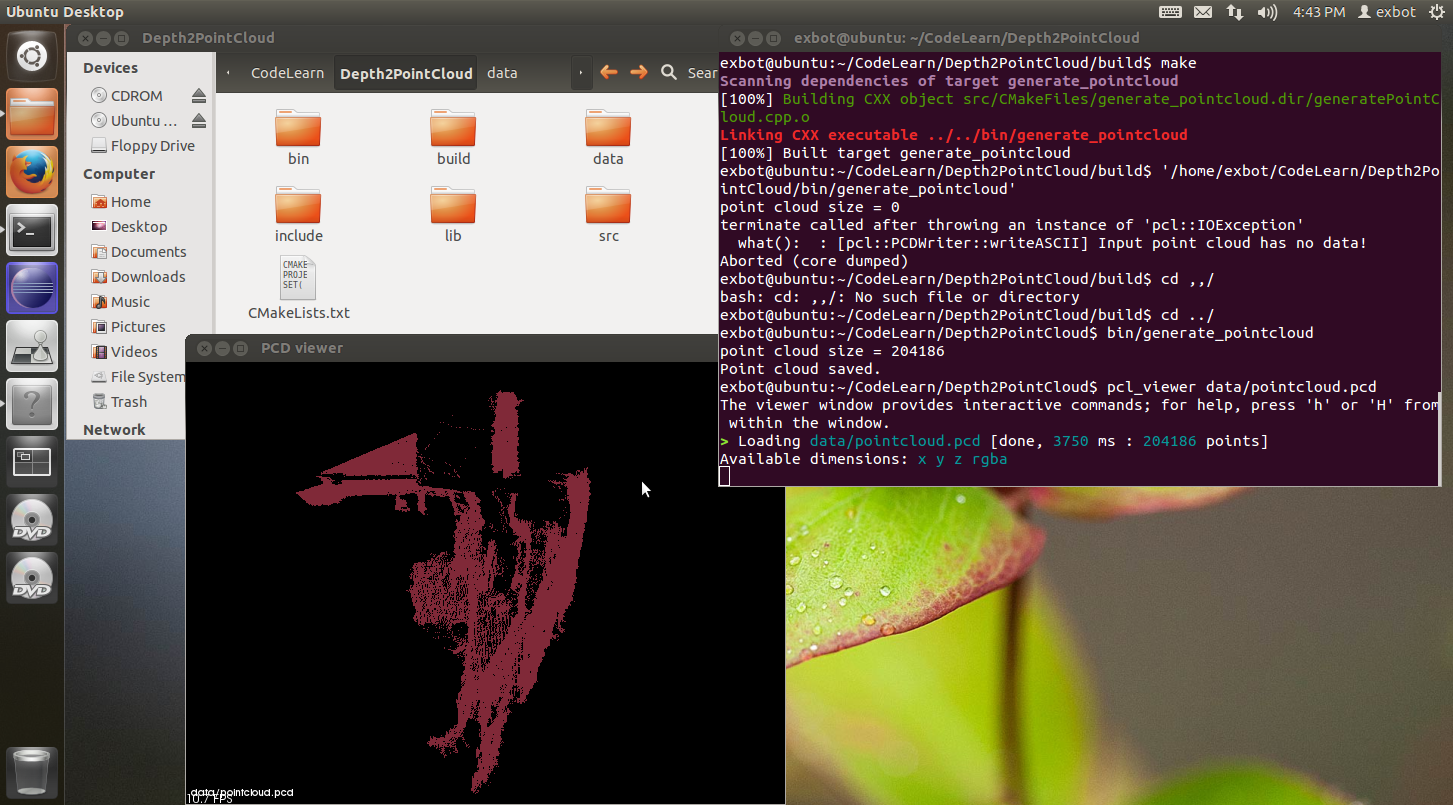
第二讲 从图像到点云
/article/4578230.htmlexbot@ubuntu:~$ cd CodeLearn exbot@ubuntu:~/CodeLearn$ cd Depth2PointCloud exbot@ubuntu:~/CodeLearn/Depth2PointCloud$ mkdir bin include lib src build exbot@ubuntu:~/CodeLearn/Depth2PointCloud$ touch CMakeLists.txt exbot@ubuntu:~/CodeLearn/Depth2PointCloud$ touch src/generatePointCloud.cpp exbot@ubuntu:~/CodeLearn/Depth2PointCloud$ touch src/CMakeLists.txt exbot@ubuntu:~/CodeLearn/Depth2PointCloud$ cd build exbot@ubuntu:~/CodeLearn/Depth2PointCloud/build$ cmake .. -- The C compiler identification is GNU -- The CXX compiler identification is GNU -- Check for working C compiler: /usr/bin/gcc -- Check for working C compiler: /usr/bin/gcc -- works -- Detecting C compiler ABI info -- Detecting C compiler ABI info - done -- Check for working CXX compiler: /usr/bin/c++ -- Check for working CXX compiler: /usr/bin/c++ -- works -- Detecting CXX compiler ABI info -- Detecting CXX compiler ABI info - done -- checking for module 'eigen3' -- found eigen3, version 3.2.7 -- Found eigen: /usr/include/eigen3 -- Boost version: 1.46.1 -- Found the following Boost libraries: -- system -- filesystem -- thread -- date_time -- iostreams -- serialization -- checking for module 'openni-dev' -- package 'openni-dev' not found -- Found openni: /usr/lib/libOpenNI.so -- Found libusb-1.0: /usr/include -- looking for PCL_COMMON -- Found PCL_COMMON: /usr/lib/libpcl_common.so -- looking for PCL_OCTREE -- Found PCL_OCTREE: /usr/lib/libpcl_octree.so -- looking for PCL_IO -- Found PCL_IO: /usr/lib/libpcl_io.so -- Found PCL: /usr/lib/libboost_system-mt.so;/usr/lib/libboost_filesystem-mt.so;/usr/lib/libboost_thread-mt.so;pthread;/usr/lib/libboost_date_time-mt.so;/usr/lib/libboost_iostreams-mt.so;/usr/lib/libboost_serialization-mt.so;optimized;/usr/lib/libpcl_common.so;debug;/usr/lib/libpcl_common.so;optimized;/usr/lib/libpcl_octree.so;debug;/usr/lib/libpcl_octree.so;/usr/lib/libOpenNI.so;vtkCommon;vtkRendering;vtkHybrid;vtkCharts;optimized;/usr/lib/libpcl_io.so;debug;/usr/lib/libpcl_io.so;/usr/lib/libboost_system-mt.so;/usr/lib/libboost_filesystem-mt.so;/usr/lib/libboost_thread-mt.so;pthread;/usr/lib/libboost_date_time-mt.so;/usr/lib/libboost_iostreams-mt.so;/usr/lib/libboost_serialization-mt.so;/usr/lib/libOpenNI.so;vtkCommon;vtkRendering;vtkHybrid;vtkCharts -- Configuring done WARNING: Target "generate_pointcloud" requests linking to directory "/usr/lib". Targets may link only to libraries. CMake is dropping the item. -- Generating done -- Build files have been written to: /home/exbot/CodeLearn/Depth2PointCloud/build exbot@ubuntu:~/CodeLearn/Depth2PointCloud/build$ make Scanning dependencies of target generate_pointcloud [100%] Building CXX object src/CMakeFiles/generate_pointcloud.dir/generatePointCloud.cpp.o Linking CXX executable ../../bin/generate_pointcloud [100%] Built target generate_pointcloud exbot@ubuntu:~/CodeLearn/Depth2PointCloud/build$ '/home/exbot/CodeLearn/Depth2PointCloud/bin/generate_pointcloud' point cloud size = 0 terminate called after throwing an instance of 'pcl::IOException' what(): : [pcl::PCDWriter::writeASCII] Input point cloud has no data! Aborted (core dumped) exbot@ubuntu:~/CodeLearn/Depth2PointCloud/build$ cd ,,/ bash: cd: ,,/: No such file or directory exbot@ubuntu:~/CodeLearn/Depth2PointCloud/build$ cd ../ exbot@ubuntu:~/CodeLearn/Depth2PointCloud$ bin/generate_pointcloud point cloud size = 204186 Point cloud saved. exbot@ubuntu:~/CodeLearn/Depth2PointCloud$ pcl_viewer data/pointcloud.pcd The viewer window provides interactive commands; for help, press 'h' or 'H' from within the window. > Loading data/pointcloud.pcd [done, 3750 ms : 204186 points] Available dimensions: x y z rgba

相关文章推荐
- Linux常用命令大全
- linux线程同步(3)-读写锁
- 在linux系统下文件和数据库的定时备份
- 在linux中连接wifi
- RPC(linux)报错 Cannot register service RPC
- centos6.7搭建lnmp及配置
- Linux系统常见的压缩与打包
- Linux安装mysql。
- Linux守护进程(init.d和xinetd)
- Linux下Samba服务器配置攻略
- Linux C语言 内存越界问题总结
- linux命令行终端设置tab补全文件名或路径不区分大小写(大小写不敏感)
- CentOS 6.5 32位系统与64位系统区别、版本查询、不同服务器分区规则
- linux如何进入图形界面
- CentOS7 安装mysql-5.7.10(glibc版)
- linux配置永久静态IP地址
- 初步了解Linux内核 (3)
- Linux signal events Learning note
- 安装linux学习二(1):centos 开启防火墙
- Linux曲径通幽:常用命令(权限管理命令)