机器学习基石HOW部分(4)
2015-12-18 10:59
274 查看
机器学习基石HOW部分(4)
标签:机器学习基石第十二章
nonlinear via nonlinear feature transform ϕ\phi plus linear with price of model complexity前面的分析都是基于“线性假设“,它的优点是实际中简单有效,而且理论上有VC 维的保证;然而,面对线性不可分的数据时(实际中也有许多这样的例子),线性方法不那么有效。
比如下面的例子:
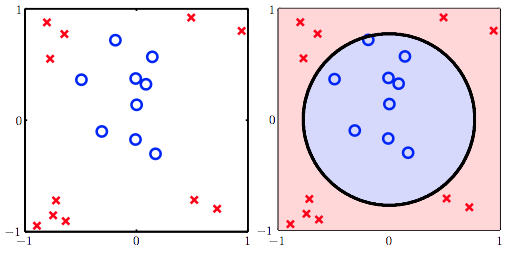
我们可以看出,二次曲线(比如圆)可以解决这个问题。
接下来就分析如何通过二次曲线假设解决线性方法无法处理的问题,进而推广到多次假设。
假设分类器是一个圆心在原点的正圆,圆内的点被分为+1,圆外的被分为-1,于是有:
hSEP(x)=sign(−x21−x22+0.6)h_{SEP}(x)=sign(−x_1^2−x_2^2+0.6)
把圆圈分类器的方程改写一下:
h(x)=(0.6.0⋅1+(−1).x21+(−1).x22)h(x)=(0.6 \quad. \quad 0⋅1+(−1)\quad. \quad x_1^2+(−1)\quad. \quad x_2^2)
=sign(w˜0+w˜1z1+w˜2z2)=sign(w˜Tz)=sign(\widetilde w_0+\widetilde w_1z_1+\widetilde w_2z_2)=sign(\widetilde w^Tz)
可以这样理解,原来的x 变量都映射到了z-空间,这样,在x-空间中线性不可分的数据,在z-空间中变得线性可分;然后,我们在新的z-空间中进行线性假设。

这个转换的过程成为nonlinear feature transform,用符号ϕ\phi表示,ϕ\phi把两个互相独立的空间给联系了起来:
(1,x21,x−22)=ϕ(x)=(z0,z1,z2)=z(1,x_1^2,x-2^2)=\phi (x)=(z_0,z_1,z_2)=z
X空间下的每个点,都对应Z空间下的某个点,同样的,X空间下的二次曲线方程,都对应Z空间下的某个一次直线方程。
h(x)=sign(w˜0+w˜1x21+w˜2x22)=sign(w˜Tϕ(x))=h˜(z)h(x)=sign(\widetilde w_0+\widetilde w_1x_1^2+\widetilde w_2x_2^2)=sign(\widetilde w^T\phi (x))=\widetilde h(z)
| w˜\widetilde w | X空间下的曲线形态 |
|---|---|
| (0.6,−1,−1) | circle(圈圈在内部,叉叉在外部) |
| (−0.6,+1,+1) | circle(圈圈在外部,叉叉在内部) |
| (0.6,−1,−2) | 椭圆(ellipse) |
| (0.6,−1,+2) | 双曲线(hyperbola) |
| (0.6,+1,+2) | 所有点都判断为圈圈 |
如果想要得到跟一般的二次曲线,如圆心不在原点的圆、斜的椭圆、抛物线等,则需要更一般的二次假设。
ϕ(x)=(1,x1,x2,x21,x1x2,x22)\phi (x)=(1,x_1,x_2,x_1^2,x_1x_2,x_2^2)
这样一来,这个完整版的Z空间的直线,就可以代表X空间下的所有二次曲线了。
非线性转换(nonlinear transform)
进行非线性转换的步骤(这里的非线性转换其实也是特征转换(feature transform),在特征工程里很常见。):
非线性变换的代价
所谓”有得必有失“,将特征转换到高次空间,我们需要付出学习代价(更高的模型复杂度)。x-空间的数据转换到z-空间之后,新的假设中的参数数量也比传统线性假设多了许多
Q-th Order Polynomial Transform
d维向量x经过Q次多项式变换:
ϕ(x)=(1,\phi (x)=(1,
x1,x2,...,xd,x_1,x_2,...,x_d,
x21,x1x2,...,x2d,x^2_1,x_1x_2,...,x^2_d,
...,...,
xQ1,xQ−11x2,...,xQd)x^Q_1,x^{Q−1}_1x_2,...,x^Q_d)
根据之前分析过的,vc 维约等于自由变量(参数)的数量,所以新假设的dvcd_{vc} 急速变大,也就是模型复杂大大增加(复杂度由O(d)变为O(QdQ^d))。
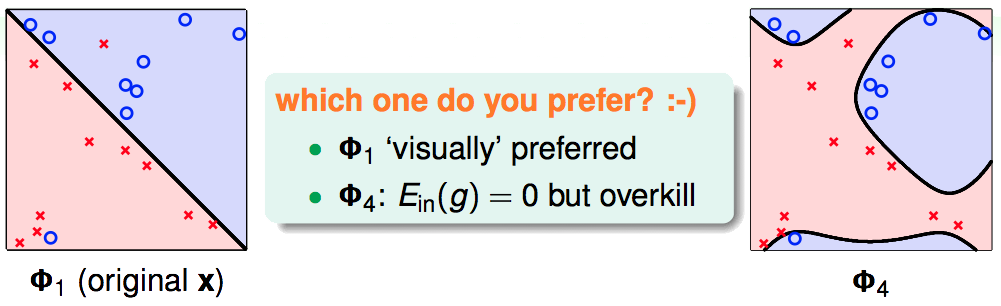
上图是分别使用原始数据进行训练以及进行4次非线性变换后的数据进行训练的结果对比。从视觉上看,虽然右图(经过4次非线性变换的模型)能够把圈圈叉叉完全分开,但显然这种模型过于复杂了。
回顾机器学习前几讲的内容,我们可以有效学习的条件是:(1)Ein(g)E_{in}(g) 约等于Eout(g)E_{out}(g);(2)Ein(g)E_{in}(g)足够小。
当模型很简单时(dvcd_{vc}很小),我们更容易满足(1)而不容易满足(2);反之,模型很复杂时(dvcd_{vc}很大),更容易满足(2)而不容易满足(1)。
那么如何选择合适的复杂度呢?像上面一样用眼睛看?暂且不讨论10维的数据有没有办法用眼睛看,就拿前面2维的例子来说,用眼睛看来选择模型是件很危险的事情。
因为你是在“看过”数据之后,由你大脑选择的一个模型,这里要考虑到你大脑“选择模型”产生的一个复杂度,因为如果重新选取一部分数据,你有可能就不再挑选这个模型了,事实上你的大脑不知不觉地参与到了模型参数估计上。因此要切记,在ϕ\phi的选择之前,不可以偷偷去看数据。
假设集(Structured Hypothesis Sets)
前面我们分析的非线性转换都是多项式转换(polynomial transform)。我们用符号ϕQ\phi Q来表示Q次多项式变换:
ϕ0(x)=(1),ϕ1(x)=(ϕ0(x),x1,x2……,xd)\phi _0(x)=(1),\phi _1(x) = (\phi _0(x),x_1,x_2……,x_d)
ϕ2(x)=(ϕ1x,x21,x1x2,……,x2d)\phi _2(x) = (\phi _1{x},x^2_1,x_1x_2,……,x^2_d)
…………
ϕQ(x)=(ϕQ−1(x),xQ1,xQ−11x2,...,xQd)\phi _Q(x)=(\phi _Q−1(x),x^Q_1,x^{Q−1}_1x_2,...,x^Q_d)
可以发现ϕi(x)\phi _i(x)中包含了ϕi−1(x)\phi _{i−1}(x),因此他们对应的Hypothesis Set也有如下关系:
Hϕ0⊂Hϕ1⊂Hϕ2⊂……⊂HϕQH\phi _0 \subset H\phi _1 \subset H\phi _2 \subset …… \subset H\phi _Q
我们将二次假设记为H2H_2,k次假设记为HkH_k。显然,高次假设的模型复杂度更高。
H0⊂H1⊂H2⊂……⊂HQH _0 \subset H _1 \subset H _2 \subset …… \subset H _Q

也就是说,高次假设对数据拟合得更充分,EinE_{in} 更小;然而,由于付出的模型复杂度代价逐渐增加,EoutE_{out} 并不是一直随着EinE_{in}减小。

通常在进行高次非线性变换的时候,应该特别小心,因为dvcd_{vc}上升很快,极容易造成overfitting。比较安全的做法是,先尝试不做非线性变换,即使用Hϕ1H\phi _1,如果效果足够好了,就不需要进行非线性变换,否则,转而进行更高次的假设,一旦获得满意的Ein 就停止学习(不再进行更高次的学习)。
总结为一句话:linear/simpler model first !

相关文章推荐
- 页游 《大皇帝》
- html5高价值的android屏幕适配精华教程(HTML5+CSS3)!
- 修改用户属主属组 chown
- 史上最全的正则表达式
- notepad扩展搜索,正则搜索
- 分享一个连接
- 史上最全的正则表达式
- Remoting随想
- 转,android Selector
- 算法训练 数字三角形
- ps命令详解与示例说明
- 机器学习基石HOW部分(2)
- 性能优化系列第四篇--移动端网络优化
- notepad扩展搜索,正则搜索
- Android学习之 使用依赖注入函数库Roboguice
- 存储的相关技术
- mysql update 随机数
- OC学习 第十节 文件管理
- 层次聚类方法(Hierarchical Clustering)
- 两种方式的i2c设备驱动的编写方法