玩转四旋翼无人机(DJI OnBoard SDK ROS)
2015-12-14 18:24
543 查看
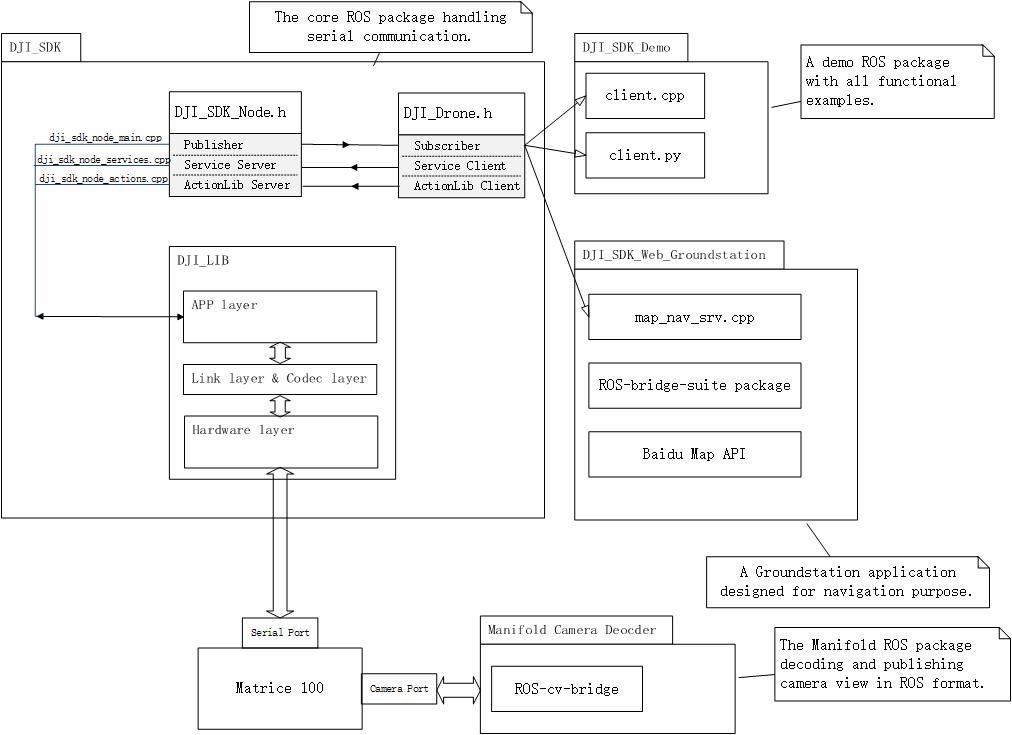
System Structure
dji_sdk: the core package handling the communication with Matrice 100, which provides a header filedji_drone.hfor future use
dji_sdk_demo: an example package of using
dji_drone.hto control the Matrice 100
dji_sdk_web_groundstation: a WebSocket example using ROS-bridge-suite, where a webpage groundstatino is provided
dji_sdk_manifold_read_cam: a specifed X3 video reading package for Manifold, video stream will be published out in RGB, CATKIN_IGNOREd by defualt
dji_sdk_manifold_read_cam_nv: same as the previous one, but use hardware decoding method and in Grayscale, CATKIN_IGNOREd by defualt
dji_sdk_doc: all documents
DJI Onboard SDK ROS Package for Video Decoding on Manifold
This package is a specified video decoding package for Manifold.How to use
Install the necessary library: refer hereDelete the
CATKIN_IGNOREfile inside package and
catkin_make.
rosrun dji_sdk_manifold_read_cam_nv dji_sdk_manifold_read_cam_nv
The image will be published into topic
/dji_sdk/image_raw
Note:
This package is specially designed for Manifold.The RC controller must be connected to Matrice 100 in order to get the video stream.
This package does not provice video transparent transmission. You cannot see the video on DJI Go while running this package.
This package uses hardware decoding method, while the other one uses FFMPEG.
The image format is in Grayscale, while the other one publishes RGB image.
DJI Onboard SDK ROS Package for Video Decoding on Manifold
This package is a specified video decoding package for Manifold.How to use
Install the necessary library: it should be already there, try to run the project in thedemofolder of your Manifold home directory. If not, please run the
install_lib.sh
Delete the
CATKIN_IGNOREfile inside package and
catkin_make.
rosrun dji_sdk_manifold_read_cam dji_sdk_manifold_read_cam
The image will be published into topic
/dji_sdk/image_raw
Note:
This package is specially designed for Manifold.The RC controller must be connected to Matrice 100 in order to get the video stream.
This package does not provice video transparent transmission. You cannot see the video on DJI Go while running this package.
This package uses FFMPENG for video decoding. while the _nv one uses hardware decoding method.
The image format is RGB, while the _nv one publishes Grayscale image.
DJI_SDK_Node是这个ROS package的核心部分,可以看出它打包了DJI_LIB,向外展示了三个模块,一是dji_sdk_node_main.cpp(Publisher), dji_sdk_node_service.cpp(Service_Server), 以及dji_sdk_node_action.cpp(ActionLib Server).为了理解这三个文件我们首先看一下,他们构成了一个类就是DJISDKNode, 所以这里先看一下他的类头文件。
//# acceleration Header header int32 ts float32 ax float32 ay float32 az //#//#Gimbal Header header int32 ts float32 pitch float32 yaw float32 roll //#Compass Header header int32 ts int8 x int8 y int8 z //#FlightControlInfo int8 cur_ctrl_dev_in_navi_mode int8 serial_req_status //#AttitudeQuaternion //# The attitude in the aeronautical frame (right-handed, Z-down, X-front, Y-right), expressed as quaternion. Quaternion order is w, x, y, z and a zero rotation would be expressed as (1 0 0 0). Header header int32 ts //# Quaternion component float32 q0 float32 q1 float32 q2 float32 q3 //# Angular speed (rad/s) float32 wx float32 wy float32 wz //#GlobalPosition Header header int32 ts //#latitude is in angle float64 latitude //#longitude is in angle float64 longitude float32 altitude float32 height //#reliablity [0,5] int8 health //#LocalPosition //# North(x) //# / //# / //# /______East(y) //# | //# | //# Donw (-z) Header header int32 ts float32 x float32 y float32 z //#RCChannels //# RC Map //# //# mode: //# //# +8000 <---> 0 <---> -8000 //# API <---> ATT <---> POS //# //# CH3(throttle) +10000 CH1(pitch) +10000 //# ^ ^ //# | | / -10000 //# CH2(yaw) | CH0(roll) | / //# -10000 <-----------> +10000 -10000 <-----------> +10000 H(gear) //# | | \ //# | | \ -4545 //# V V //# -10000 -10000 //# Header header int32 ts float32 roll float32 pitch float32 yaw float32 throttle float32 mode float32 gear //#waypoint //#latitude is in degree float64 latitude //#longitude is in degree float64 longitude float32 altitude //#heading is in [-180,180] int16 heading //#stay time is in second uint16 staytime //#Velocity Header header int32 ts float32 vx float32 vy float32 vz //# if from guidance uint8 health_flag uint8 feedback_sensor_id
这是从文件msg中的读出的变量定义结构,其他action,srv中的变量类似如此。DJISDKNode中开始定义了一些状态变量,加速度,位姿四元数,位置和姿态等。
class DJISDKNode
{
private:
//Drone state variables:
dji_sdk::Acceleration acceleration;
dji_sdk::AttitudeQuaternion attitude_quaternion;
dji_sdk::Compass compass;
dji_sdk::FlightControlInfo flight_
control_info;
uint8_t flight_status;
dji_sdk::Gimbal gimbal;//姿态,yaw,pitch,roll
dji_sdk::GlobalPosition global_position;//维度,经度,海拔。
dji_sdk::GlobalPosition global_position_ref;
dji_sdk::LocalPosition local_position;//x,y,z
dji_sdk::LocalPosition local_position_ref;
dji_sdk::PowerStatus power_status;
dji_sdk::RCChannels rc_channels;
dji_sdk::Velocity velocity;
nav_msgs::Odometry odometry;
bool sdk_permission_opened = false;
bool activated = false;
bool localposbase_use_height = true;
int global_position_ref_seted = 0;
//internal variables
char app_key[65];
activate_data_t user_act_data;
//对应前面的状态变量各有一个发布者。
//Publishers:
ros::Publisher acceleration_publisher;
ros::Publisher attitude_quaternion_publisher;
ros::Publisher compass_publisher;
ros::Publisher flight_control_info_publisher;
ros::Publisher flight_status_publisher;
ros::Publisher gimbal_publisher;
ros::Publisher global_position_publisher;
ros::Publisher local_position_publisher;
ros::Publisher power_status_publisher;
ros::Publisher rc_channels_publisher;
ros::Publisher velocity_publisher;
ros::Publisher activation_publisher;
ros::Publisher odometry_publisher;
ros::Publisher sdk_permission_publisher;
//构造发布者
void init_publishers(ros::NodeHandle\& nh)
{
// start ros publisher
acceleration_publisher = nh.advertise<dji_sdk::Acceleration>("dji_sdk/acceleration", 10);
//Creating a handle to publish messages to a topic is done using the ros::NodeHandle class.
attitude_quaternion_publisher = nh.advertise<dji_sdk::AttitudeQuaternion>("dji_sdk/attitude_quaternion", 10);
compass_publisher = nh.advertise<dji_sdk::Compass>("dji_sdk/compass", 10);
flight_control_info_publisher = nh.advertise<dji_sdk::FlightControlInfo>("dji_sdk/flight_control_info", 10);
flight_status_publisher = nh.advertise<std_msgs::UInt8>("dji_sdk/flight_status", 10);
gimbal_publisher = nh.advertise<dji_sdk::Gimbal>("dji_sdk/gimbal", 10);
global_position_publisher = nh.advertise<dji_sdk::GlobalPosition>("dji_sdk/global_position", 10);
local_position_publisher = nh.advertise<dji_sdk::LocalPosition>("dji_sdk/local_position", 10);
power_status_publisher = nh.advertise<dji_sdk::PowerStatus>("dji_sdk/power_status", 10);
rc_channels_publisher = nh.advertise<dji_sdk::RCChannels>("dji_sdk/rc_channels", 10);
velocity_publisher = nh.advertise<dji_sdk::Velocity>("dji_sdk/velocity", 10);
activation_publisher = nh.advertise<std_msgs::UInt8>("dji_sdk/activation", 10);
odometry_publisher = nh.advertise<nav_msgs::Odometry>("dji_sdk/odometry",10);
sdk_permission_publisher = nh.advertise<std_msgs::UInt8>("dji_sdk/sdk_permission", 10);
}
//Services:
ros::ServiceServer attitude_control_service;
ros::ServiceServer camera_action_control_service;
ros::ServiceServer drone_task_control_service;
ros::ServiceServer gimbal_angle_control_service;
ros::ServiceServer gimbal_speed_control_service;
ros::ServiceServer global_position_control_service;
ros::ServiceServer local_position_control_service;
ros::ServiceServer sdk_permission_control_service;
ros::ServiceServer velocity_control_service;
bool attitude_control_callback(dji_sdk::AttitudeControl::Request\& request, dji_sdk::AttitudeControl::Response\& response);
bool camera_action_control_callback(dji_sdk::CameraActionControl::Request\& request, dji_sdk::CameraActionControl::Response\& response);
bool drone_task_control_callback(dji_sdk::DroneTaskControl::Request\& request, dji_sdk::DroneTaskControl::Response\& response);
bool gimbal_angle_control_callback(dji_sdk::GimbalAngleControl::Request\& request, dji_sdk::GimbalAngleControl::Response\& response);
bool gimbal_speed_control_callback(dji_sdk::GimbalSpeedControl::Request\& request, dji_sdk::GimbalSpeedControl::Response\& response);
bool global_position_control_callback(dji_sdk::GlobalPositionControl::Request\& request, dji_sdk::GlobalPositionControl::Response\& response);
bool local_position_control_callback(dji_sdk::LocalPositionControl::Request\& request, dji_sdk::LocalPositionControl::Response\& response);
bool sdk_permission_control_callback(dji_sdk::SDKPermissionControl::Request\& request, dji_sdk::SDKPermissionControl::Response\& response);
bool velocity_control_callback(dji_sdk::VelocityControl::Request\& request, dji_sdk::VelocityControl::Response\& response);
void init_services(ros::NodeHandle\& nh)
{
attitude_control_service = nh.advertiseService("dji_sdk/attitude_control", \&DJISDKNode::attitude_control_callback, this);
camera_action_control_service = nh.advertiseService("dji_sdk/camera_action_control",\&DJISDKNode::camera_action_control_callback, this);
drone_task_control_service = nh.advertiseService("dji_sdk/drone_task_control", \&DJISDKNode::drone_task_control_callback, this);
gimbal_angle_control_service = nh.advertiseService("dji_sdk/gimbal_angle_control", \&DJISDKNode::gimbal_angle_control_callback, this);
gimbal_speed_control_service = nh.advertiseService("dji_sdk/gimbal_speed_control", \&DJISDKNode::gimbal_speed_control_callback, this);
global_position_control_service = nh.advertiseService("dji_sdk/global_position_control", \&DJISDKNode::global_position_control_callback, this);
local_position_control_service = nh.advertiseService("dji_sdk/local_position_control", \&DJISDKNode::local_position_control_callback, this);
sdk_permission_control_service = nh.advertiseService("dji_sdk/sdk_permission_control", \&DJISDKNode::sdk_permission_control_callback, this);
velocity_control_service = nh.advertiseService("dji_sdk/velocity_control", \&DJISDKNode::velocity_control_callback, this);
}
//Actions:
typedef actionlib::SimpleActionServer<dji_sdk::DroneTaskAction> DroneTaskActionServer;
typedef actionlib::SimpleActionServer<dji_sdk::LocalPositionNavigationAction> LocalPositionNavigationActionServer;
typedef actionlib::SimpleActionServer<dji_sdk::GlobalPositionNavigationAction> GlobalPositionNavigationActionServer;
typedef actionlib::SimpleActionServer<dji_sdk::WaypointNavigationAction> WaypointNavigationActionServer;
DroneTaskActionServer* drone_task_action_server;
LocalPositionNavigationActionServer* local_position_navigation_action_server;
GlobalPositionNavigationActionServer* global_position_navigation_action_server;
WaypointNavigationActionServer* waypoint_navigation_action_server;
dji_sdk::DroneTaskFeedback drone_task_feedback;
dji_sdk::DroneTaskResult drone_task_result;
dji_sdk::LocalPositionNavigationFeedback local_position_navigation_feedback;
dji_sdk::LocalPositionNavigationResult local_position_navigation_result;
dji_sdk::GlobalPositionNavigationFeedback global_position_navigation_feedback;
dji_sdk::GlobalPositionNavigationResult global_position_navigation_result;
dji_sdk::WaypointNavigationFeedback waypoint_navigation_feedback;
dji_sdk::WaypointNavigationResult waypoint_navigation_result;
bool drone_task_action_callback(const dji_sdk::DroneTaskGoalConstPtr\& goal);
bool local_position_navigation_action_callback(const dji_sdk::LocalPositionNavigationGoalConstPtr\& goal);
bool global_position_navigation_action_callback(const dji_sdk::GlobalPositionNavigationGoalConstPtr\& goal);
bool waypoint_navigation_action_callback(const dji_sdk::WaypointNavigationGoalConstPtr\& goal);
void init_actions(ros::NodeHandle\& nh)
{
drone_task_action_server = new DroneTaskActionServer(nh,
"dji_sdk/drone_task_action",
boost::bind(\&DJISDKNode::drone_task_action_callback, this, _1), false);
drone_task_action_server->start();
local_position_navigation_action_server = new LocalPositionNavigationActionServer(nh,
"dji_sdk/local_position_navigation_action",
boost::bind(\&DJISDKNode::local_position_navigation_action_callback, this, _1), false);
local_position_navigation_action_server->start();
global_position_navigation_action_server = new GlobalPositionNavigationActionServer(nh,
"dji_sdk/global_position_navigation_action",
boost::bind(\&DJISDKNode::global_position_navigation_action_callback, this, _1), false );
global_position_navigation_action_server->start();
waypoint_navigation_action_server = new WaypointNavigationActionServer(nh,
"dji_sdk/waypoint_navigation_action",
boost::bind(\&DJISDKNode::waypoint_navigation_action_callback, this, _1), false);
waypoint_navigation_action_server->start();
}
public:
DJISDKNode(ros::NodeHandle\& nh, ros::NodeHandle\& nh_private);
private:
int init_parameters_and_activate(ros::NodeHandle\& nh_private);
void broadcast_callback();
bool process_waypoint(dji_sdk::Waypoint new_waypoint);
inline void gps_convert_ned(float \&ned_x, float \&ned_y,
double gps_t_lon, double gps_t_lat,
double gps_r_lon, double gps_r_lat);
dji_sdk::LocalPosition gps_convert_ned(dji_sdk::GlobalPosition loc);
};

相关文章推荐
- 四旋翼飞行器的姿态解算小知识点
- 微型四旋翼飞行器的设计与制作
- 基于四元数的扩展卡尔曼(EKF)滤波器四旋翼姿态解算详解-2.EKF介绍
- 基于四元数的扩展卡尔曼(EKF)滤波器四旋翼姿态解算详解-1.KF介绍
- 四旋翼位置控制之-GPS水平位置控制
- 四元数、欧拉角和方向余弦的定义及关系
- 四轴飞行diy全套入门教程(从最基础的开始)
- 四旋翼飞行器结构和原理
- Pixhawk 四旋翼状态估计
- hjr-四旋翼飞行器串级PID飞控算法
- 四旋翼电池电压与油门曲线拟合
- 四轴思路(持续更新)
- 应用mavlink通信协议的四轴offboard地面站(上位机)
- 基于optitrack的四旋翼飞行器室内定点悬停simulink程序
- 初学四旋翼之定高
- 初学四旋翼之光流定点
- 初学四旋翼之蓝牙通讯
- 四旋翼建模
- 配置ROS Indigo&gazebo仿真环境
- 四旋翼飞行器教学笔记2.2——姿态读取的计算