【APUE】1、第一章 UNIX基础知识
2015-11-24 11:02
501 查看
第一章 UNIX基础知识
1、如何运行书中的例子
方法一:
1.APUE2源代码下载:http://www.apuebook.com/src.tar.gz
2.我保存到了/root下.解压缩:tar -xzvf src.tar.gz
3.cd apue.2e进入apue.2e目录,查看README,告诉我们linux系统只要修改Make.defines.linux再make
4.vi Make.defines.linux 修改WKDIR=/root/apue.2e 就是说工作目录为WKDIR=/root/apue.2e
5.修改/root/apue.2e/std/linux.mk把全部的nawk改为awk.因些linux默认没有nawk
6.make
现在,你可以把它拷贝到你能寻找的地方,在编写例子的时候,你就可以
4、拷贝apue2e_src/apue.2e/include/apue.h和apue2e_src/apue.2e/lib/libapue.a
到你的源代码目录。
5、使用gcc -o hello hello.c libapue.a来编译你的源代码
方法二:
apue编程的例子都有关include"apue.h"的代码,其实apue.h并不是系统自带的,它是作者编写的头文件,源代码在附录B中.因此一个方法是.把刚才生成的 /root/apue.2e/include/apue.h直接复制到/usr/include下.
还有像err_sys的函数也在附录B中.同样的方法是在/usr/include新建一个 my_err.h的文件,把Figure B.3. Error functionsthat output to standard error内容复制进去.这样按例子编程就只需要在行首添加:#include "my_err.h"就可以了..
引用:http://blog.csdn.net/csufuyi/archive/2008/03/25/2218074.aspx
2. 标准输入、标准输出和标准错误
每当运行一个新程序时,所有的s h e l l都为其打开三个文件描述符:标准输入、标
准输出以及标准出错。
4. 标准I/O
使用标准I / O可无需担心如何选取最佳的缓存长度。另一个使用标准I / O函数的优点与处理输入行有关(常常发生在U N I X的应用中)。例如,f g e t s函数读一完整的行,而另一方面, r e a d函数读指定字节数。
/**
* 功能:标准输入复制到标准输出,也就能复制任一UNIX普通文件。
* 时间:2015年11月22日17:16:44
* 作者:cutter_point
*/
#include <stdio.h>
#include "apue.h"
#include "error.c"
int main(void)
{
int c; //我们用这个c来存放我们读取到的字符
while((c = getc(stdin)) != EOF)
{
if(putc(c, stdout) == EOF) //把c放到,标准输出
{
err_sys("output error");
}//if
}//while
if(ferror(stdin)) //标准输入
{
err_sys("input error");
}//if
exit(0);
}
1.6 程序和进程
1、程序
程序(p r o g r a m)是存放在磁盘文件中的可执行文件。使用6个e x e c函数中的一个由内核将
程序读入存储器,并使其执行。
2、进程和进程ID
程序的执行实例被称为进程( p r o c e s s)。本书的每一页几乎都会使用这一术语。某些操作
系统用任务表示正被执行的程序。
/**
* 功能:打印出进程ID
* 时间:2015年11月22日17:26:54
* 作者:cutter_point
*/
#include "apue.h"
#include "error.c"
int main(void)
{
printf("hello world from process ID %ld\n", (long)getpid());
exit(0);
}3、进程控制
有三个用于进程控制的主要函数: f o r k、e x e c和w a i t p i d(e x e c函数有六种变体,但经常把它们统称为e x e c函数)。
并没有代码,这个后面会讲解
4、线程和线程ID
通常,一个进程只有一个控制线程——某一时刻执行的一组机器指令。
多个控制线程也可以充分利用多处理器系统的并行能力。
与进程相同,线程也用ID标识。但是,线程ID只在它所属的进程内起作用。
1.7 出错处理
当U N I X函数出错时,往常返回一个负值,而且整型变量e r r n o通常设置为具有特定信息的一个值。
对于e r r n o应当知道两条规则。
第一条规则是:如果没有出错,则其值不会被一个例程清除。
第二条是:任一函数都不会将e r r n o值设置为0,在< e r r n o . h >中定义的所有常数都不为0。
1.9 信号
进程如何处理信号有三种选择:
(1) 忽略该信号。有些信号表示硬件异常,例如,除以0或访问进程地址空间以外的单元等,因为这些异常产生的后果不确定,所以不推荐使用这种处理方式。
(2) 按系统默认方式处理。对于0除,系统默认方式是终止该进程。
(3) 提供一个函数,信号发生时则调用该函数。使用这种方式,我们将能知道什么时候产生了信号,并按所希望的方式处理它。
/**
* 功能:处理进程信号
* 时间:2015年11月24日10:16:09
* 作者:cutter_point
*/
#include "apue.h"
#include "error.c"
#include <sys/wait.h>
/**
* 信号捕获函数声明
*/
static void sig_int(int);
int main(void)
{
char buf[MAXLINE]; //MAXLINE在apue.h中4096
pid_t pid; //进程id号
int status;
if(signal(SIGINT, sig_int) == SIG_ERR)
{
//捕获信号
err_sys("signal error");
}//if
printf("%% ");
while(fgets(buf, MAXLINE, stdin) != NULL)
{
if(buf[strlen(buf) - 1] == '\n')
{
buf[strlen(buf) - 1] = 0;
}//if
if((pid = fork()) < 0)
{
err_sys("fork error");
}//if
else if(pid == 0)
{
execlp(buf, buf, (char *)0);
err_ret("不能执行:%s", buf);
exit(127);
}//else if
if((pid = waitpid(pid, &status, 0)) < 0)
{
err_sys("等待pid错误");
}//if
printf("%% ");
}//while
exit(0);
}
void sig_int(int signo)
{
printf("interrupt\n%% ");
}
1.10 时间值
(1) 日历时间。该值是自1 9 7 0年1月1日0 0 : 0 0 : 0 0以来国际标准时间(U T C)所经过的秒数累计值(早期的手册称U T C为格林尼治标准时间)。这些时间值可用于记录文件最近一次的修改时间等。(2) 进程时间。这也被称为C P U时间,用以度量进程使用的中央处理机资源。进程时间以时钟滴答计算,多年来,每秒钟取为5 0、6 0或1 0 0个滴答。系统基本数据类型c l o c k t保存这种时间值。另外, P O S I X定义常数C L K T C K,用其说明每秒滴答数。
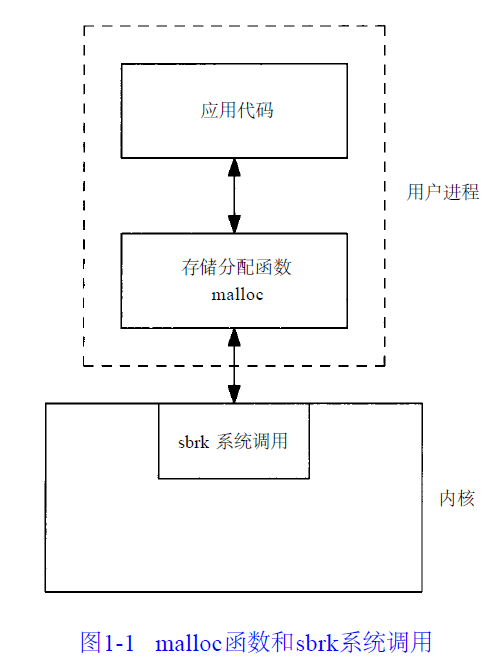
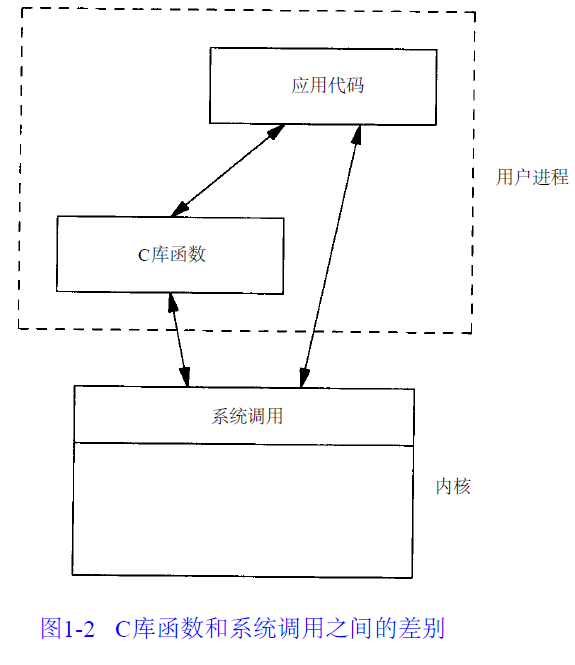
1.11 系统调用和库函数
从执行者的角度来看,系统调用和库函数之间有重大区别,但从用户角度来看,其区别并不非常重要。