Linux IPC实践 --System V信号量(1)
2015-11-07 16:03
741 查看
信号量API
[cpp]view plaincopy


#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/sem.h>
int semget(key_t key, int nsems, int semflg);
int semctl(int semid, int semnum, int cmd, ...);
int semop(int semid, struct sembuf *sops, unsigned nsops);
semget
[cpp]
view plaincopy
int semget(key_t key, int nsems, int semflg);
创建/访问一个信号量集
参数:
key: 信号集键(key)
nsems:信号集中信号量的个数
semflg: 由九个权限标志构成,它们的用法和创建文件时使用的mode模式标志一致
返回值:成功返回一个非负整数,即该信号集的标识码;失败返回-1;
此时创建的信号量集中的每一个信号量都会有一个默认值: 0, 如果需要更改该值, 则需要调用semctl函数->更改初始值;
[cpp]
view plaincopy
/** 示例1: 封装一个创建一个信号量集函数
该信号量集包含1个信号量;
权限为0666
**/
int sem_create(key_t key)
{
int semid = semget(key, 1, IPC_CREAT|IPC_EXCL|0666);
if (semid == -1)
err_exit("sem_create error");
return semid;
}
[cpp]
view plaincopy
/** 示例2: 打开一个信号量集
nsems(信号量数量)可以填0,
semflg(信号量权限)也可以填0, 表示使用默认的权限打开
**/
int sem_open(key_t key)
{
int semid = semget(key, 0, 0);
if (semid == -1)
err_exit("sem_open error");
return semid;
}
shmctl
[cpp]
view plaincopy
int semctl(int semid, int semnum, int cmd, ...);
控制信号量集
参数
semid:由semget返回的信号集标识码
semnum:信号集中信号量的序号(注意: 从0开始The semaphores in a set are numbered starting at 0.)
cmd:将要采取的动作(常用取值如下)
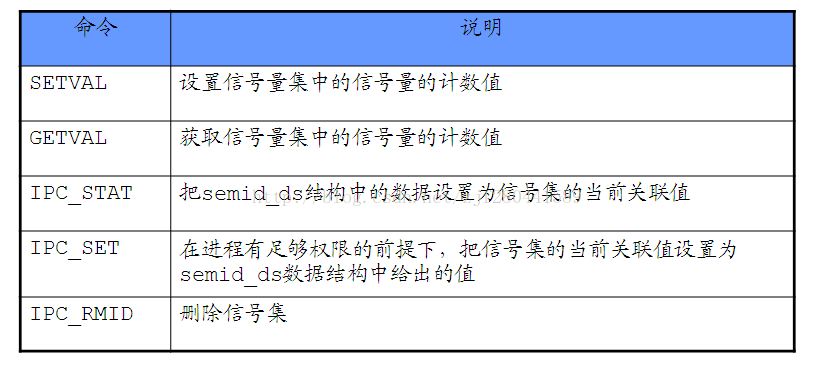
如果该函数需要第四个参数(有时是不需要第四个参数的, 取决于cmd的取值), 则程序中必须定义如下的联合体:
[cpp]
view plaincopy

union semun
{
int val; /* Value for SETVAL */
struct semid_ds *buf; /* Buffer for IPC_STAT, IPC_SET */
unsigned short *array; /* Array for GETALL, SETALL */
struct seminfo *__buf; /* Buffer for IPC_INFO (Linux-specific)*/
};
[cpp]
view plaincopy
//struct semid_ds : Linux内核为System V信号量维护的数据结构
struct semid_ds
{
struct ipc_perm sem_perm; /* Ownership and permissions */
time_t sem_otime; /* Last semop time */
time_t sem_ctime; /* Last change time */
unsigned long sem_nsems; /* No. of semaphores in set */
};
[cpp]
view plaincopy
/** 示例1: 将信号量集semid中的第一个信号量的值设置成为value(SETVAL)
注意: semun联合体需要自己给出(从man-page中拷贝出来即可)
**/
union semun
{
int val; /* Value for SETVAL */
struct semid_ds *buf; /* Buffer for IPC_STAT, IPC_SET */
unsigned short *array; /* Array for GETALL, SETALL */
struct seminfo *__buf; /* Buffer for IPC_INFO
(Linux-specific) */
};
int sem_setval(int semid, int value)
{
union semun su;
su.val = value;
if (semctl(semid, 0, SETVAL, su) == -1)
err_exit("sem_setval error");
return 0;
}
[cpp]
view plaincopy
/** 示例2: 获取信号量集中第一个信号所关联的值(GETVAL)
注意: 此时第四个参数可以不填, 而信号量所关联的值可以通过semctl的返回值返回(the value of semval.)
**/
int sem_getval(int semid)
{
int value = semctl(semid, 0, GETVAL);
if (value == -1)
err_exit("sem_getval error");
return value;
return 0;
}
[cpp]
view plaincopy
/** 示例3: 删除一个信号量集(注意是删除整个集合)
IPC_RMID Immediately remove(立刻删除) the semaphore set, awakening all processes blocked in semop(2) calls on the set (with an error return and errno set to EIDRM)[然后唤醒所有阻塞在该信号量上的进程]. The argument semnum is ignored[忽略第二个参数].
**/
int sem_delete(int semid)
{
if (semctl(semid, 0, IPC_RMID) == -1)
err_exit("sem_delete error");
return 0;
}
//测试代码
int main(int argc,char *argv[])
{
int semid = sem_create(0x1234); //创建一个信号量集
sem_setval(semid, 500); //设置值
cout << sem_getval(semid) << endl; //获取值
sleep(10);
sem_delete(semid); //删除该集合
}
[cpp]
view plaincopy
/**示例4: 获取/设置信号量的权限
注意:一定要设定struct semid_ds结构体, 以指定使用semun的哪个字段
**/
int sem_getmode(int semid)
{
union semun su;
// 注意: 下面这两行语句一定要设定.
// (告诉内核使用的semun的哪个字段)
struct semid_ds sd;
su.buf = &sd;
//
if (semctl(semid, 0, IPC_STAT, su) == -1)
err_exit("sem_getmode error");
printf("current permissions is: %o\n", su.buf->sem_perm.mode);
return 0;
}
int sem_setmode(int semid, char *mode)
{
union semun su;
// 注意: 下面这两行语句一定要设定.
// (告诉内核使用的semun的哪个字段)
struct semid_ds sd;
su.buf = &sd;
//
sscanf(mode, "%o", (unsigned int *)&su.buf->sem_perm.mode);
if (semctl(semid, 0, IPC_SET, su) == -1)
err_exit("sem_setmode error");
return 0;
}
semop
[cpp]
view plaincopy
int semop(int semid, struct sembuf *sops, unsigned nsops);
用来操纵一个信号量集, 以实现P,V操作
参数:
semid:是该信号量的标识码,也就是semget函数的返回值
sops:是个指向一个结构数组(如果信号量集中只有一个信号量的话, 只有一个结构体也可)的指针
nsops:所设置的信号量个数(如果nsops>1话, 需要将sops[第二个参数]设置成为一个结构数组, 具体参考Man-Page给出的示例代码), 第三个参数其实也指出第二个参数所表示对象的个数;
[cpp]
view plaincopy
//sembuf结构体
struct sembuf
{
unsigned short sem_num; /*semaphore number:信号量的编号(从0开始)*/
short sem_op; /* semaphore operation(+1, 0, -1) */
short sem_flg; /* operation flags: 常用取值为SEM_UNDO(解释见下) */
};
sem_op是信号量一次PV操作时加减的数值,一般只会用到两个值,一个是“-1”,也就是P操作,等待信号量变得可用;另一个是“+1”,也就是V操作,发出信号量已经变得可用, 该参数还可以等于0, 表示进程将阻塞直到信号量的值等于0;
sem_flg有三个取值: SEM_UNDO(在进程结束时, 将该进程对信号量的操作复原[即:取消该进程对信号量所有的操作], 推荐使用), IPC_NOWAIT(非阻塞)或0(默认操作, 并不撤销操作);
[cpp]
view plaincopy
/** 示例: P,V操作封装
**可以将sembuf的第三个参数设置为IPC_NOWAIT/0, 以查看程序的状态的变化
**/
int sem_P(int semid)
{
struct sembuf sops = {0, -1, SEM_UNDO};
if (semop(semid, &sops, 1) == -1)
err_exit("sem_P error");
return 0;
}
int sem_V(int semid)
{
struct sembuf sops = {0, +1, SEM_UNDO};
if (semop(semid, &sops, 1) == -1)
err_exit("sem_V error");
return 0;
}
[cpp]
view plaincopy
/** 信号量综合运用示例:
编译完成之后, 直接运行./semtool, 程序将打印该工具的用法;
下面的这些函数调用, 只不过是对上面所封装函数的稍稍改动, 理解起来并不困难;
**/
//semtool.cpp
#include "Usage.h"
int main(int argc,char *argv[])
{
int opt = getopt(argc, argv, "cdpvs:gfm:");
if (opt == '?')
exit(EXIT_FAILURE);
else if (opt == -1)
{
usage();
exit(EXIT_FAILURE);
}
key_t key = ftok(".", 's');
int semid;
switch (opt)
{
case 'c':
sem_create(key);
break;
case 'd':
semid = sem_open(key);
sem_delete(semid);
break;
case 'p':
semid = sem_open(key);
sem_P(semid);
sem_getval(semid);
break;
case 'v':
semid = sem_open(key);
sem_V(semid);
sem_getval(semid);
break;
case 's':
semid = sem_open(key);
sem_setval(semid, atoi(optarg));
sem_getval(semid);
break;
case 'g':
semid = sem_open(key);
sem_getval(semid);
break;
case 'f':
semid = sem_open(key);
sem_getmode(semid);
break;
case 'm':
semid = sem_open(key);
sem_setmode(semid, argv[2]);
sem_getmode(semid);
break;
default:
break;
}
return 0;
}
[cpp]
view plaincopy
//Usage.h
#ifndef USAGE_H_INCLUDED
#define USAGE_H_INCLUDED
#include <iostream>
#include <string>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <string.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <sys/ipc.h>
#include <sys/wait.h>
#include <sys/time.h>
#include <sys/msg.h>
#include <sys/shm.h>
#include <sys/mman.h>
#include <sys/sem.h>
#include <fcntl.h>
#include <signal.h>
#include <unistd.h>
#include <grp.h>
#include <pwd.h>
#include <time.h>
#include <errno.h>
#include <mqueue.h>
using namespace std;
inline void err_quit(std::string message);
inline void err_exit(std::string message);
void usage()
{
cerr << "Usage:" << endl;
cerr << "./semtool -c #create" << endl;
cerr << "./semtool -d #delte" << endl;
cerr << "./semtool -p #signal" << endl;
cerr << "./semtool -v #wait" << endl;
cerr << "./semtool -s <val> #set-value" << endl;
cerr << "./semtool -g #get-value" << endl;
cerr << "./semtool -f #print-mode" << endl;
cerr << "./semtool -m <mode> #set-mode" << endl;
}
int sem_create(key_t key)
{
int semid = semget(key, 1, IPC_CREAT|IPC_EXCL|0666);
if (semid == -1)
err_exit("sem_create error");
return semid;
}
int sem_open(key_t key)
{
int semid = semget(key, 0, 0);
if (semid == -1)
err_exit("sem_open error");
return semid;
}
union semun
{
int val; /* Value for SETVAL */
struct semid_ds *buf; /* Buffer for IPC_STAT, IPC_SET */
unsigned short *array; /* Array for GETALL, SETALL */
struct seminfo *__buf; /* Buffer for IPC_INFO (Linux-specific) */
};
int sem_getmode(int semid)
{
union semun su;
// 注意: 下面这两行语句一定要设定.
// (告诉内核使用的semun的哪个字段)
struct semid_ds sd;
su.buf = &sd;
//
if (semctl(semid, 0, IPC_STAT, su) == -1)
err_exit("sem_getmode error");
printf("current permissions is: %o\n", su.buf->sem_perm.mode);
return 0;
}
int sem_setmode(int semid, char *mode)
{
union semun su;
// 注意: 下面这两行语句一定要设定.
// (告诉内核使用的semun的哪个字段)
struct semid_ds sd;
su.buf = &sd;
//
sscanf(mode, "%o", (unsigned int *)&su.buf->sem_perm.mode);
if (semctl(semid, 0, IPC_SET, su) == -1)
err_exit("sem_setmode error");
return 0;
}
int sem_getval(int semid)
{
int value = semctl(semid, 0, GETVAL);
if (value == -1)
err_exit("sem_getval error");
cout << "current value: " << value << endl;
return value;
}
int sem_setval(int semid, int value)
{
union semun su;
su.val = value;
if (semctl(semid, 0, SETVAL, su) == -1)
err_exit("sem_setval error");
return 0;
}
int sem_delete(int semid)
{
if (semctl(semid, 0, IPC_RMID) == -1)
err_exit("sem_delete error");
return 0;
}
// 为了能够打印信号量的持续变化, 因此sem_flg我们并没用SEM_UNDO
// 但是我们推荐使用SEM_UNDO
int sem_P(int semid)
{
struct sembuf sops = {0, -1, 0};
if (semop(semid, &sops, 1) == -1)
err_exit("sem_P error");
return 0;
}
int sem_V(int semid)
{
struct sembuf sops = {0, +1, 0};
if (semop(semid, &sops, 1) == -1)
err_exit("sem_V error");
return 0;
}
inline void err_quit(std::string message)
{
std::cerr << message << std::endl;
exit(EXIT_FAILURE);
}
inline void err_exit(std::string message)
{
perror(message.c_str());
exit(EXIT_FAILURE);
}
#endif // USAGE_H_INCLUDED
附-Makefile
[plain]
view plaincopy
.PHONY: clean all
CC = g++
CPPFLAGS = -Wall -g
BIN = semtool
SOURCES = $(BIN.=.cpp)
all: $(BIN)
%.o: %.c
$(CC) $(CPPFLAGS) -c $^ -o $@
main: main.o
$(CC) $(CPPFLAGS) $^ -lrt -o $@
clean:
-rm -rf $(BIN) *.o bin/ obj/ core

相关文章推荐
- Linux下小巧的取色精灵gcolor2
- 【拔苗计划】linux学习笔记——top命令学习
- linux权限浅析
- Linux rpm 命令参数使用详解[介绍和应用]
- Linux进程管理之SMP负载平衡
- Centos6.5 安装Python 3.5+ipython
- Linux IPC实 --共享内存/内存映射
- Ubuntu和Windows默认系统启动顺序修改
- Linux-dd命令详解
- 2015.11.07_16_03_Linux日志系统syslog
- 从windows系统硬盘安装CentOS
- linux命令-mount挂载umount卸载
- Linux系统中strace命令的使用教程
- Linux 远程管理工具(SecureCRT)
- linux debian
- linux下安装及启动mysql
- 安装最新的qt5.5.1,在使用qmake -v 出现qmake -v could not exec '/usr/lib/x86_64-linux-gnu/qt4/bin/qmake': No su
- Linux Scheduling Domains
- linux下同步工具rsync+inotify 详解
- linux命令-mke2fs