ROS(10):mac 下树莓派Raspberry Pi 烧录 img
2015-10-08 22:31
579 查看
本文的原文连接是: http://blog.csdn.net/freewebsys/article/details/48980993 未经博主允许不得转载。
博主地址是:http://blog.csdn.net/freewebsys
树莓派是一个Arm的开发板,只有香烟盒大小,最新版的是树莓派2。4 cup 900MHZ,1G内存大小,4个usb接口。
https://www.raspberrypi.org/products/model-b-plus/
sd卡是自己购买的。32G SanDisk。


https://www.raspberrypi.org/downloads/raspbian/
下载后对文件进行校验:
在mac下面遇到一个问题,居然解压缩不了这个zip格式的文件。
还是在widnows上面解压缩的。解压缩后,文件有4G。
官方推荐使用 sdcard formatter,这个只识别sd卡,不会出现格式错误的问题。支持windows 和 mac两个系统。
https://www.sdcard.org/downloads/formatter_4/
操作简单点击下就行。
2),查看磁盘
记住磁盘叫/dev/disk2s1。
在写入镜像文件之前,先卸载磁盘。
然后开始写入文件。(特别注意写入文件没有s1且前面多了个r,/dev/disk2s1对应的输出文件是/dev/rdisk2)
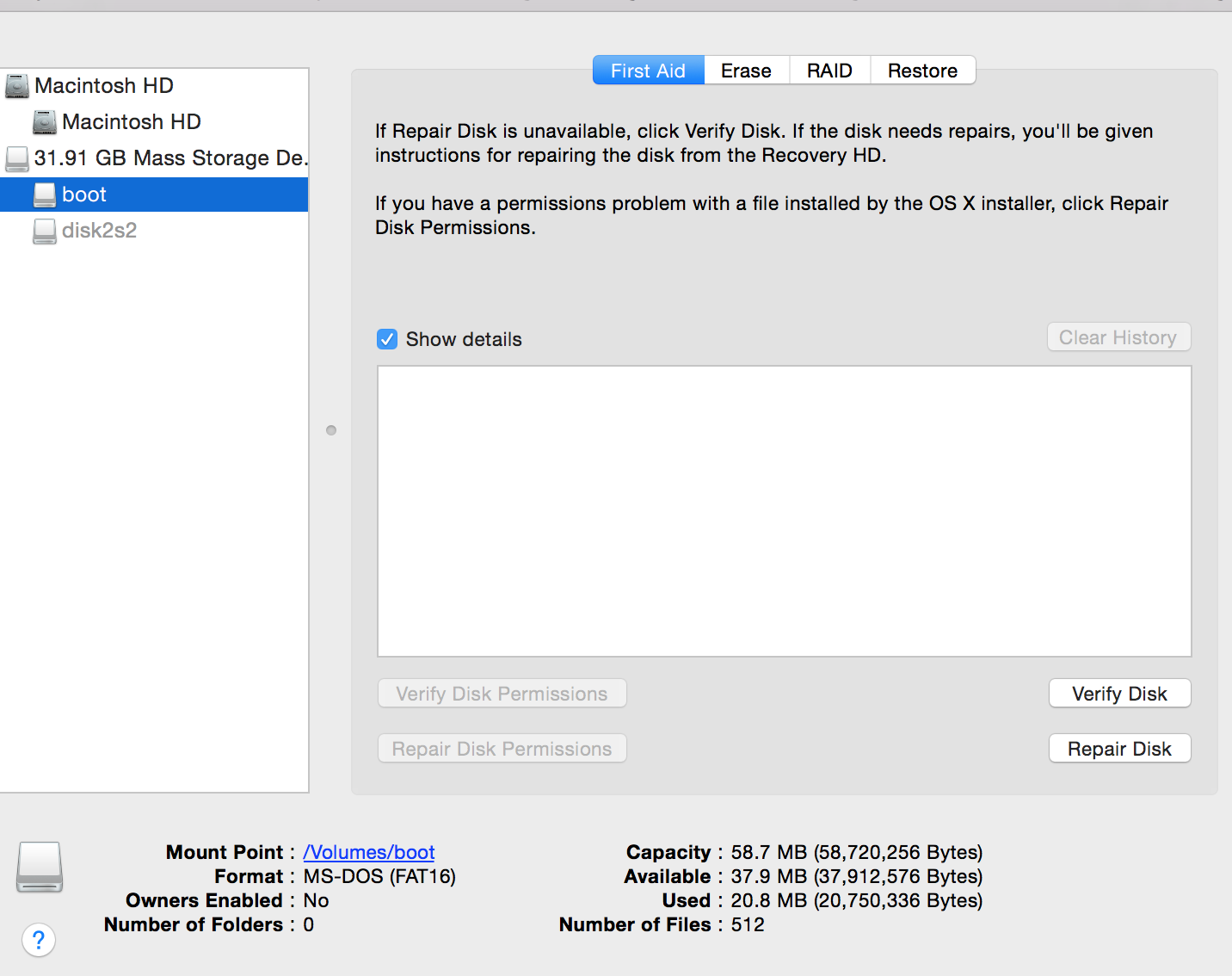
写入文件成功后,可以在磁盘管理里面看到多了个boot磁盘,说明写入文件成功。
搜索后发现hdmi 转 dvi是可以的。我试验了下 hdmi 转 vga也是可以的。
2,同时修改 boot磁盘下的 config.txt 文件
开启hdmi
参考文章:http://wangye.org/blog/archives/762/
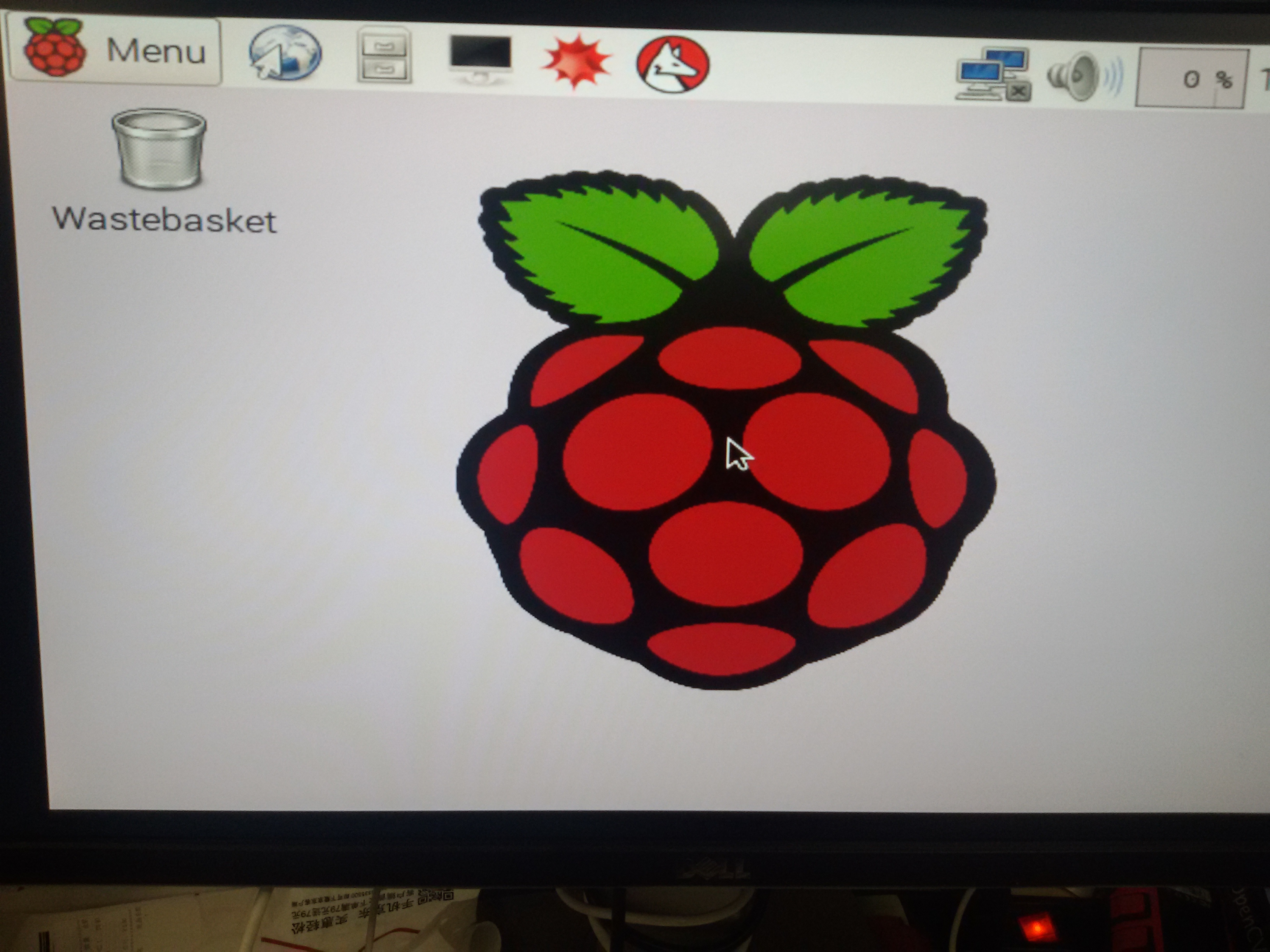
启动之后,可以使用键盘和鼠标了,就是一个arm的小电脑,启动速度非常的快。

很快进入操作系统。默认用户名 pi,直接进入的,没有登录窗口。
还按照了libreOffice呢。

博主地址是:http://blog.csdn.net/freewebsys
树莓派非常是一个非常简单的arm开发平台,带图像界面的开发环境。
上面有python开发环境,可以很快的开发有创意的产品。
接下来尝试在上面安装 ROS,开发机器人。
博主地址是:http://blog.csdn.net/freewebsys
1,关于树莓派
https://www.raspberrypi.org树莓派是一个Arm的开发板,只有香烟盒大小,最新版的是树莓派2。4 cup 900MHZ,1G内存大小,4个usb接口。
https://www.raspberrypi.org/products/model-b-plus/
sd卡是自己购买的。32G SanDisk。
2,下载img
直接下载镜像文件zip格式的。https://www.raspberrypi.org/downloads/raspbian/
下载后对文件进行校验:
$ shasum 2015-09-24-raspbian-jessie.zip d8d4880cd0e4f155f343984725d5bd94c1f86023 2015-09-24-raspbian-jessie.zip
在mac下面遇到一个问题,居然解压缩不了这个zip格式的文件。
还是在widnows上面解压缩的。解压缩后,文件有4G。
3,镜像安装
1),首先格式化磁盘。官方推荐使用 sdcard formatter,这个只识别sd卡,不会出现格式错误的问题。支持windows 和 mac两个系统。
https://www.sdcard.org/downloads/formatter_4/
操作简单点击下就行。
2),查看磁盘
$ df -lh Filesystem Size Used Avail Capacity iused ifree %iused Mounted on /dev/disk1 233Gi 215Gi 18Gi 93% 56386271 4592543 92% / /dev/disk2s1 30Gi 1.6Mi 30Gi 1% 0 0 100% /Volumes/21 1
记住磁盘叫/dev/disk2s1。
在写入镜像文件之前,先卸载磁盘。
$ sudo diskutil umount /dev/disk2s1 Volume 21 on disk2s1 unmounted
然后开始写入文件。(特别注意写入文件没有s1且前面多了个r,/dev/disk2s1对应的输出文件是/dev/rdisk2)
$ sudo dd bs=1m if=./2015-09-24-raspbian-jessie.img of=/dev/rdisk2 4125+0 records in 4125+0 records out 4325376000 bytes transferred in 401.205151 secs (10780958 bytes/sec)
写入文件成功后,可以在磁盘管理里面看到多了个boot磁盘,说明写入文件成功。
4,启动
遇到两个问题1,hdmi视频输出线,直接接入到现实器上面不行。没有图像显示。搜索后发现hdmi 转 dvi是可以的。我试验了下 hdmi 转 vga也是可以的。
2,同时修改 boot磁盘下的 config.txt 文件
开启hdmi
hdmi_safe=1
参考文章:http://wangye.org/blog/archives/762/
启动之后,可以使用键盘和鼠标了,就是一个arm的小电脑,启动速度非常的快。
很快进入操作系统。默认用户名 pi,直接进入的,没有登录窗口。
还按照了libreOffice呢。
5,总结
本文的原文连接是: http://blog.csdn.net/freewebsys/article/details/48980993 未经博主允许不得转载。博主地址是:http://blog.csdn.net/freewebsys
树莓派非常是一个非常简单的arm开发平台,带图像界面的开发环境。
上面有python开发环境,可以很快的开发有创意的产品。
接下来尝试在上面安装 ROS,开发机器人。

相关文章推荐
- #新闻拍一拍# IBM 招聘广告要求应聘者具备至少 12 年 K8S 使用经验
- vivi下重新调整分区
- ARM Linux系统启动
- Linux及ARM Linux程序开发笔记(零基础入门篇)
- 收集的ROS防火墙脚本
- 树莓派中python获取GY-85九轴模块信息示例
- 在树莓派2或树莓派B+上安装Python和OpenCV的教程
- Raspberry PI 512M 入手
- 我的 ARM+Linux 学习路线
- banana pi BPI-M2 四核开源单板计算机
- 香蕉派 banana pi 英文论坛与GITHUB正式上线
- 香蕉派 banana pi BPI-M2_WiringPI 测试成功 代码已经上传GITHUB
- 树莓派(Raspberry Pi):完美的家用服务器
- 树莓派使用实例之:2 Pi R
- Arduino VS 树莓派:哪个才是你的菜?
- 在树莓派上安装游戏模拟器
- 把你的树莓派打造成一个NAS
- 教你用树莓派打造一个家庭影院
- 树莓派使用实例之:2 Pi R 第二篇:Web服务器