Opencv+Kinect2.0 的环境配置和获取彩色图
2015-09-13 19:21
441 查看
一、环境的配置
在属性管理器窗口中找到Microsoft.Cpp.Win32.user这一项,双击进入。
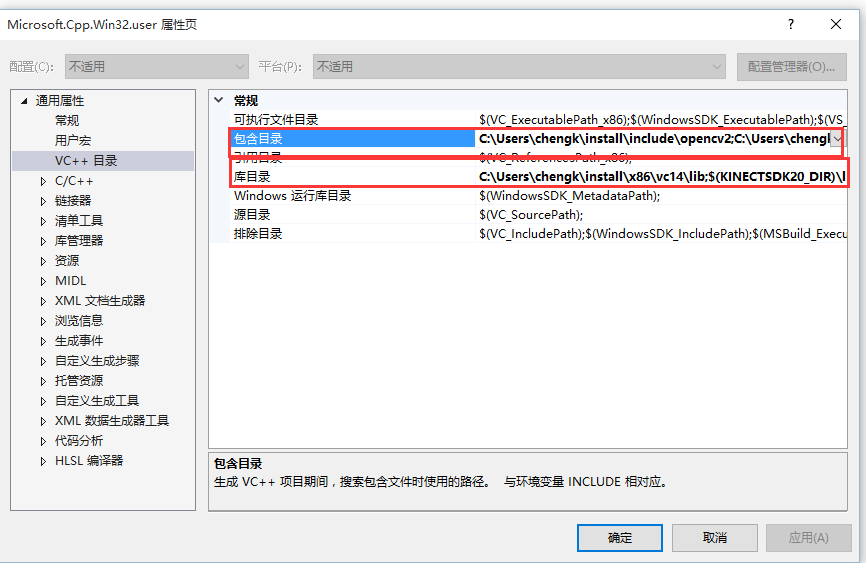
然后在 通用属性,VC++目录下
默认Opencv已经配置好,在包含目录中添加:
$(KINECTSDK20_DIR)\inc
在库目录中添加:
$(KINECTSDK20_DIR)\lib\x86
然后在cpp文件的include….后添加
到这就可以了。
二、获取彩色图
直接看代码和注释吧
运行图:

在属性管理器窗口中找到Microsoft.Cpp.Win32.user这一项,双击进入。
然后在 通用属性,VC++目录下
默认Opencv已经配置好,在包含目录中添加:
$(KINECTSDK20_DIR)\inc
在库目录中添加:
$(KINECTSDK20_DIR)\lib\x86
然后在cpp文件的include….后添加
#include <Kinect.h> #pragma comment ( lib, "kinect20.lib" )
到这就可以了。
二、获取彩色图
直接看代码和注释吧
#include "opencv2/core.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/videoio.hpp"
#include <iostream>
#include <Kinect.h>
#pragma comment ( lib, "kinect20.lib" )
using namespace cv;
using namespace std;
int main()
{
HRESULT hResult = S_OK; //用于检测操作是否成功
IKinectSensor *kinect; //创建一个感应器
GetDefaultKinectSensor(&kinect);
kinect->Open(); //打开感应器
IColorFrameSource *colorsource;
IColorFrameReader *colorreader;
IFrameDescription *colorde;
kinect->get_ColorFrameSource(&colorsource);
colorsource->OpenReader(&colorreader);
colorsource->get_FrameDescription(&colorde);
int width = 0; //长和宽
int hight = 0;
colorde->get_Height(&hight);
colorde->get_Width(&width);
Mat a(hight, width, CV_8UC4); //注意:这里必须为4通道的图,Kinect的数据只能以Bgra格式传出
namedWindow("aaa");
while (1)
{
IColorFrame*frame;
hResult=colorreader->AcquireLatestFrame(&frame);
if (SUCCEEDED(hResult))
{
frame->CopyConvertedFrameDataToArray(hight*width * 4, reinterpret_cast<BYTE*>(a.data), ColorImageFormat::ColorImageFormat_Bgra); //传出数据
}
if (frame != NULL) //释放
{
frame->Release();
frame = NULL;
}
if (waitKey(30) == VK_ESCAPE)
break;
imshow("aaa", a);
}
if (colorsource != NULL) //全部释放掉
{
colorsource->Release();
colorsource = NULL;
}
if (colorreader != NULL)
{
colorreader->Release();
colorreader = NULL;
}
if (colorde != NULL)
{
colorde->Release();
colorde = NULL;
}
if (kinect)
{
kinect->Close();
}
if (kinect != NULL)
{
kinect->Release();
kinect = NULL;
}
destroyAllWindows();
}运行图:

相关文章推荐
- linux 查找出包含某个字符串的所有文件的方法详解
- Linux 用户管理
- 如何将tomcat加入到linux服务中去
- CentOS-6.5下编译hadoop-2.6.0的eclipse插件
- 软件自动测试架构设计
- linux(centos) SPAM 问题
- linux 间拷贝文件
- 中国人最常用的密码TOP10,一猜即中,下次见到新WiFi要试试
- Linux里设置环境变量的方法(export PATH)
- 小案例--门户网站
- Linux下用普通用户安装mysql数据库(编译好的二进制包安装)
- 【Linux】RedHat9.0 利用sftp传文件
- Linux php出现中文乱码的解决方法
- Codesys——PLCopen基本运动控制功能块的使用方法总结
- 系统批量运维工具paramiko
- Apache "No services installed"问题的处理以及Apache提示 the requested operation has failed而无法启动
- Linux快速教程和图说设计模式(互联网博集)
- tomcat 7源代码调试环境搭建(二)
- C#实现插件式架构的方法
- iTOP4412裸机开发——按键(轮巡方式)