init进程【2】——解析配置文件
2015-09-10 23:17
399 查看
【转账自这里】http://blog.csdn.net/zhgxhuaa
在前面的一篇文章中分析了init进程的启动过程和main函数,本文将着重对配置文件(init.rc)的解析做一下分析。
关于init.rc脚本的介绍,在@system/core/init/readme.txt中有完整的介绍,这里不再赘述,不想看英文的朋友也可以看下面的部分,这个部分关于rc脚本的介绍转自http://blog.csdn.net/nokiaguy/article/details/9109491。相当于readme的翻译吧。
init.rc文件并不是普通的配置文件,而是由一种被称为“Android初始化语言”(Android Init Language,这里简称为AIL)的脚本写成的文件。在了解init如何解析init.rc文件之前,先了解AIL非常必要,否则机械地分析init.c及其相关文件的源代码毫无意义。
为了学习AIL,读者可以到自己Android手机的根目录寻找init.rc文件,最好下载到本地以便查看,如果有编译好的Android源代码,在<Android源代码根目录>out/target/product/geneic/root目录也可找到init.rc文件。
AIL由如下4部分组成。
1. 动作(Actions)
2. 命令(Commands)
3.服务(Services)
4. 选项(Options)
这4部分都是面向行的代码,也就是说用回车换行符作为每一条语句的分隔符。而每一行的代码由多个符号(Tokens)表示。可以使用反斜杠转义符在Token中插入空格。双引号可以将多个由空格分隔的Tokens合成一个Tokens。如果一行写不下,可以在行尾加上反斜杠,来连接下一行。也就是说,可以用反斜杠将多行代码连接成一行代码。
AIL的注释与很多Shell脚本一行,以#开头。
AIL在编写时需要分成多个部分(Section),而每一部分的开头需要指定Actions或Services。也就是说,每一个Actions或Services确定一个Section。而所有的Commands和Options只能属于最近定义的Section。如果Commands和Options在第一个Section之前被定义,它们将被忽略。
Actions和Services的名称必须唯一。如果有两个或多个Action或Service拥有同样的名称,那么init在执行它们时将抛出错误,并忽略这些Action和Service。
下面来看看Actions、Services、Commands和Options分别应如何设置。
Actions的语法格式如下:
[plain] view
plaincopy
on <trigger>
<command>
<command>
<command>
也就是说Actions是以关键字on开头的,然后跟一个触发器,接下来是若干命令。例如,下面就是一个标准的Action
[plain] view
plaincopy
on boot
ifup lo
hostname localhost
domainname localdomain
其中boot是触发器,下面三行是command
那么init.rc到底支持哪些触发器呢?目前init.rc支持如下5类触发器。
1. boot
这是init执行后第一个被触发Trigger,也就是在 /init.rc被装载之后执行该Trigger
2. <name>=<value>
当属性<name>被设置成<value>时被触发。例如,
on property:vold.decrypt=trigger_reset_main
class_reset main
3. device-added-<path>
当设备节点被添加时触发
4. device-removed-<path>
当设备节点被移除时添加
5. service-exited-<name>
会在一个特定的服务退出时触发
Actions后需要跟若干个命令,这些命令如下:
1. exec <path> [<argument> ]*
创建和执行一个程序(<path>)。在程序完全执行前,init将会阻塞。由于它不是内置命令,应尽量避免使用exec ,它可能会引起init执行超时。
2. export <name> <value>
在全局环境中将 <name>变量的值设为<value>。(这将会被所有在这命令之后运行的进程所继承)
3. ifup <interface>
启动网络接口
4. import <filename>
指定要解析的其他配置文件。常被用于当前配置文件的扩展
5. hostname <name>
设置主机名
6. chdir <directory>
改变工作目录
7. chmod <octal-mode><path>
改变文件的访问权限
8. chown <owner><group> <path>
更改文件的所有者和组
9. chroot <directory>
改变处理根目录
10. class_start<serviceclass>
启动所有指定服务类下的未运行服务。
11 class_stop<serviceclass>
停止指定服务类下的所有已运行的服务。
12. domainname <name>
设置域名
13. insmod <path>
加载<path>指定的驱动模块
14. mkdir <path> [mode][owner] [group]
创建一个目录<path> ,可以选择性地指定mode、owner以及group。如果没有指定,默认的权限为755,并属于root用户和 root组。
15. mount <type> <device> <dir> [<mountoption> ]*
试图在目录<dir>挂载指定的设备。<device> 可以是mtd@name的形式指定一个mtd块设备。<mountoption>包括 "ro"、"rw"、"re
16. setkey
保留,暂时未用
17. setprop <name><value>
将系统属性<name>的值设为<value>。
18. setrlimit <resource> <cur> <max>
设置<resource>的rlimit (资源限制)
19. start <service>
启动指定服务(如果此服务还未运行)。
20.stop<service>
停止指定服务(如果此服务在运行中)。
21. symlink <target> <path>
创建一个指向<path>的软连接<target>。
22. sysclktz <mins_west_of_gmt>
设置系统时钟基准(0代表时钟滴答以格林威治平均时(GMT)为准)
23. trigger <event>
触发一个事件。用于Action排队
24. wait <path> [<timeout> ]
等待一个文件是否存在,当文件存在时立即返回,或到<timeout>指定的超时时间后返回,如果不指定<timeout>,默认超时时间是5秒。
25. write <path> <string> [ <string> ]*
向<path>指定的文件写入一个或多个字符串。
Services (服务)是一个程序,他在初始化时启动,并在退出时重启(可选)。Services (服务)的形式如下:
[plain] view
plaincopy
service <name> <pathname> [ <argument> ]*
<option>
<option>
例如,下面是一个标准的Service用法
[plain] view
plaincopy
service servicemanager /system/bin/servicemanager
class core
user system
group system
critical
onrestart restart zygote
onrestart restart media
onrestart restart surfaceflinger
onrestart restart drm
Services的选项是服务的修饰符,可以影响服务如何以及怎样运行。服务支持的选项如下:
1. critical
表明这是一个非常重要的服务。如果该服务4分钟内退出大于4次,系统将会重启并进入 Recovery (恢复)模式。
2. disabled
表明这个服务不会同与他同trigger (触发器)下的服务自动启动。该服务必须被明确的按名启动。
3. setenv <name><value>
在进程启动时将环境变量<name>设置为<value>。
4. socket <name><type> <perm> [ <user> [ <group> ] ]
Create a unix domain socketnamed /dev/socket/<name> and pass
its fd to the launchedprocess. <type> must be"dgram", "stream" or "seqpacket".
User and group default to0.
创建一个unix域的名为/dev/socket/<name> 的套接字,并传递它的文件描述符给已启动的进程。<type> 必须是 "dgram","stream" 或"seqpacket"。用户和组默认是0。
5. user <username>
在启动这个服务前改变该服务的用户名。此时默认为 root。
6. group <groupname> [<groupname> ]*
在启动这个服务前改变该服务的组名。除了(必需的)第一个组名,附加的组名通常被用于设置进程的补充组(通过setgroups函数),档案默认是root。
7. oneshot
服务退出时不重启。
8. class <name>
指定一个服务类。所有同一类的服务可以同时启动和停止。如果不通过class选项指定一个类,则默认为"default"类服务。
9. onrestart
当服务重启,执行一个命令(下详)。
@system/core/init/init.c

early-init主要用于设置init进程(进程号为1)的oom_adj的值,以及启动ueventd进程。oom_adj是Linux和Android中用来表示进程重要性的一个值,取值范围为[-17, 15]。在Android中系统在杀死进程时会根据oom_adj和空闲内存大小作为依据,oom_adj越大越容易被杀死。
Android将程序分成以下几类,按照重要性依次降低的顺序:
[cpp] view
plaincopyprint?


on early-init
# Set init and its forked children's oom_adj.
write /proc/1/oom_adj -16
# Set the security context for the init process.
# This should occur before anything else (e.g. ueventd) is started.
setcon u:r:init:s0
start ueventd
这里设置init进程的oom_adj的值为-16.这里要说明的是,我们现在分析的是init.rc文件,在文件头部我们发现还导入了其他的rc脚本。其他rc脚本中的文件结构与init.rc是类似的。在init进程解析rc脚本时,会将所有rc脚本中的配置安装执行阶段一并解析。即:init.rc中的early-init与init,${hardware}.rc中的early-init是一并解析的。
在执行完early-init以后,接下来就是init阶段。在init阶段主要用来:设置环境变量,创建和挂在文件节点。下面是init接的的不分代码截选:
@system/core/rootdir/init.environ.rc.in
[cpp] view
plaincopyprint?
# set up the global environment
on init
export PATH /sbin:/vendor/bin:/system/sbin:/system/bin:/system/xbin
export LD_LIBRARY_PATH /vendor/lib:/system/lib
export ANDROID_BOOTLOGO 1
export ANDROID_ROOT /system
export ANDROID_ASSETS /system/app
export ANDROID_DATA /data
export ANDROID_STORAGE /storage
export ASEC_MOUNTPOINT /mnt/asec
export LOOP_MOUNTPOINT /mnt/obb
export BOOTCLASSPATH %BOOTCLASSPATH%
以前设置环境变量这一段时在init.rc中的,现在放到了init.environ.rc.in,这样代码也更清晰一些。
@system/core/rootdir/init.rc
[cpp] view
plaincopyprint?
on init
sysclktz 0
loglevel 3
# Backward compatibility
symlink /system/etc /etc
symlink /sys/kernel/debug /d
# Right now vendor lives on the same filesystem as system,
# but someday that may change.
symlink /system/vendor /vendor
# Create cgroup mount point for cpu accounting
mkdir /acct
mount cgroup none /acct cpuacct
mkdir /acct/uid
mkdir /system
mkdir /data 0771 system system
mkdir /cache 0770 system cache
mkdir /config 0500 root root
接下来是fs相关的几个过程,它们主要用于文件系统的挂载,下面是截取的一小部分代码:
[cpp] view
plaincopyprint?
on post-fs
# once everything is setup, no need to modify /
mount rootfs rootfs / ro remount
# mount shared so changes propagate into child namespaces
mount rootfs rootfs / shared rec
mount tmpfs tmpfs /mnt/secure private rec
# We chown/chmod /cache again so because mount is run as root + defaults
chown system cache /cache
chmod 0770 /cache
# We restorecon /cache in case the cache partition has been reset.
restorecon /cache
如果你看过以前的版本的init.rc脚本,看到这里会想起,应该还有几行:
[cpp] view
plaincopyprint?
mount yaffs2 mtd@system /system
mount yaffs2 mtd@userdata /data
这两行用于挂载/system分区和/data分区到yaffs2文件系统。手机领域有多种不同的内存设备,其中NAND闪存设备以其低功耗、重量轻、性能佳等优良特性,受到绝大多数厂商的青睐。NAND闪存采用yaffs2文件系统。
可以看出在Android 4.4中默认已经不再使用yaffs2。在完成文件系统的创建和挂载后,完整的Android根文件系统结构如下:

接下来看一下boot部分,该部分主要用于设置应用程序终止条件,应用程序驱动目录及文件权限等。下面是一部分代码片段:
[cpp] view
plaincopyprint?
on boot
# basic network init
ifup lo
hostname localhost
domainname localdomain
# set RLIMIT_NICE to allow priorities from 19 to -20
setrlimit 13 40 40
# Memory management. Basic kernel parameters, and allow the high
# level system server to be able to adjust the kernel OOM driver
# parameters to match how it is managing things.
write /proc/sys/vm/overcommit_memory 1
write /proc/sys/vm/min_free_order_shift 4
chown root system /sys/module/lowmemorykiller/parameters/adj
chmod 0664 /sys/module/lowmemorykiller/parameters/adj
chown root system /sys/module/lowmemorykiller/parameters/minfree
chmod 0664 /sys/module/lowmemorykiller/parameters/minfree
class_start core
class_start main
在on boot部分,我们可以发现许多”on property:<name> = <value>"的代码片段,这些是根据属性的触发器,但相应的属性满足一定的条件时,就会触发相应的动作。此外,还有许多service字段,service后面第一项表示服务的名称,第二项表示服务的路径,接下来的第2行等是服务的附加内容,配合服务使用,主要包含运行权限、条件以及重启等相关选项。
[cpp] view
plaincopyprint?
init_parse_config_file("/init.rc");//解析init.rc配置文件
@system/core/init/init_parser.c
[cpp] view
plaincopyprint?
int init_parse_config_file(const char *fn)
{
char *data;
data = read_file(fn, 0);
if (!data) return -1;
parse_config(fn, data);
DUMP();
return 0;
}
read_file(fn, 0)函数将fn指针指向的路径(这里即:/init.rc)所对应的文件读取到内存中,保存为字符串形式,并返回字符串在内存中的地址;然后parse_config会对文件进行解析,生成动作列表(Action List)和服务列表(Service List)。关于read_file()函数的实现在@system/core/init/util.c中。下面是parse_config()的实现:
[cpp] view
plaincopyprint?
static void parse_config(const char *fn, char *s)
{
struct parse_state state;
struct listnode import_list;//导入链表,用于保持在init.rc中通过import导入的其他rc文件
struct listnode *node;
char *args[INIT_PARSER_MAXARGS];
int nargs;
nargs = 0;
state.filename = fn;//初始化filename的值为init.rc文件
state.line = 0;//初始化行号为0
state.ptr = s;//初始化ptr指向s,即read_file读入到内存中的init.rc文件的首地址
state.nexttoken = 0;//初始化nexttoken的值为0
state.parse_line = parse_line_no_op;//初始化行解析函数
list_init(&import_list);
state.priv = &import_list;
for (;;) {
switch (next_token(&state)) {
case T_EOF://如果返回为T_EOF,表示init.rc已经解析完成,则跳到parser_done解析import进来的其他rc脚本
state.parse_line(&state, 0, 0);
goto parser_done;
case T_NEWLINE:
state.line++;//一行读取完成后,行号加1
if (nargs) {//如果刚才解析的一行为语法行(非注释等),则nargs的值不为0,需要对这一行进行语法解析
int kw = lookup_keyword(args[0]);//init.rc中每一个语法行均是以一个keyword开头的,因此args[0]即表示这一行的keyword
if (kw_is(kw, SECTION)) {
state.parse_line(&state, 0, 0);
parse_new_section(&state, kw, nargs, args);
} else {
state.parse_line(&state, nargs, args);
}
nargs = 0;//复位
}
break;
case T_TEXT://将nexttoken解析的一个text保存到args字符串数组中,nargs的最大值为INIT_PARSER_MAXARGS(64),即init.rc中一行最多不能超过INIT_PARSER_MAXARGS个text(单词)
if (nargs < INIT_PARSER_MAXARGS) {
args[nargs++] = state.text;
}
break;
}
}
parser_done:
list_for_each(node, &import_list) {
struct import *import = node_to_item(node, struct import, list);
int ret;
INFO("importing '%s'", import->filename);
ret = init_parse_config_file(import->filename);
if (ret)
ERROR("could not import file '%s' from '%s'\n",
import->filename, fn);
}
}
parse_config()函数,代码虽然很短,实际上却比较复杂。接下来将对其进行详细分析。首先看一下struct parse_state的定义:
[cpp] view
plaincopyprint?
struct parse_state
{
char *ptr;//指针,指向剩余的尚未被解析的数据(即:ptr指向当前解析到的位置)
char *text;//一行文本
int line; //行号
int nexttoken;//下一行的标示,T_EOF标示文件结束,T_TEXT表示需要进行解释的文本,T_NEWLINE标示一个空行或者是注释行
void *context;//一个action或者service
void (*parse_line)(struct parse_state *state, int nargs, char **args);//函数指针,指向当前行的解析函数
const char *filename;//解析的rc文件
void *priv;//执行import链表的指针
};
next_token()以行为单位分割参数传递过来的字符串。
@system/core/init/parser.c
[cpp] view
plaincopyprint?
int next_token(struct parse_state *state)
{
char *x = state->ptr;
char *s;
if (state->nexttoken) {//nexttoken的值为0
int t = state->nexttoken;
state->nexttoken = 0;
return t;
}
for (;;) {
switch (*x) {
case 0://到底末尾,解析完成
state->ptr = x;
return T_EOF;
case '\n'://换行符,返回T_NEWLINE,表示下一个token是新的一行
x++;
state->ptr = x;
return T_NEWLINE;
case ' '://忽略空格、制表符等
case '\t':
case '\r':
x++;
continue;
case '#'://在当前解析到的字符为#号时,将指针一直移动到#行的末尾,然后判断下一个字符是T_NEWLINE还是T_EOF
while (*x && (*x != '\n')) x++;//注意x++,当指针移动到#行末尾时,x执行末尾的下一个字符
if (*x == '\n') {
state->ptr = x+1;
return T_NEWLINE;
} else {
state->ptr = x;
return T_EOF;
}
default:
goto text;//解析的为普通文本
}
}
textdone://x指向一个单词的开头位置,s指向末尾位置,将s设置为0(C字符串末尾为0),即表示单词结束
state->ptr = x;
*s = 0;
return T_TEXT;
text:
state->text = s = x;
textresume:
for (;;) {
switch (*x) {
case 0:
goto textdone;
case ' ':
case '\t':
case '\r':
x++;
goto textdone;
case '\n':
state->nexttoken = T_NEWLINE;
x++;
goto textdone;
case '"':
x++;
for (;;) {
switch (*x) {
case 0:
/* unterminated quoted thing */
state->ptr = x;
return T_EOF;
case '"':
x++;
goto textresume;
default:
*s++ = *x++;
}
}
break;
case '\\':
x++;
switch (*x) {
case 0:
goto textdone;
case 'n':
*s++ = '\n';
break;
case 'r':
*s++ = '\r';
break;
case 't':
*s++ = '\t';
break;
case '\\':
*s++ = '\\';
break;
case '\r':
/* \ <cr> <lf> -> line continuation */
if (x[1] != '\n') {
x++;
continue;
}
case '\n':
/* \ <lf> -> line continuation */
state->line++;
x++;
/* eat any extra whitespace */
while((*x == ' ') || (*x == '\t')) x++;
continue;
default:
/* unknown escape -- just copy */
*s++ = *x++;
}
continue;
default:
*s++ = *x++;
}
}
return T_EOF;
}
在parse_config()中通过next_token从rc脚本中解析出一行行的rc语句,下面看一下另一个重要的函数lookup_keyword()的实现:
[cpp] view
plaincopyprint?
int lookup_keyword(const char *s)
{
switch (*s++) {
case 'c':
if (!strcmp(s, "opy")) return K_copy;
if (!strcmp(s, "apability")) return K_capability;
if (!strcmp(s, "hdir")) return K_chdir;
if (!strcmp(s, "hroot")) return K_chroot;
if (!strcmp(s, "lass")) return K_class;
if (!strcmp(s, "lass_start")) return K_class_start;
if (!strcmp(s, "lass_stop")) return K_class_stop;
if (!strcmp(s, "lass_reset")) return K_class_reset;
if (!strcmp(s, "onsole")) return K_console;
if (!strcmp(s, "hown")) return K_chown;
if (!strcmp(s, "hmod")) return K_chmod;
if (!strcmp(s, "ritical")) return K_critical;
break;
case 'd':
if (!strcmp(s, "isabled")) return K_disabled;
if (!strcmp(s, "omainname")) return K_domainname;
break;
case 'e':
if (!strcmp(s, "xec")) return K_exec;
if (!strcmp(s, "xport")) return K_export;
break;
case 'g':
if (!strcmp(s, "roup")) return K_group;
break;
case 'h':
if (!strcmp(s, "ostname")) return K_hostname;
break;
case 'i':
if (!strcmp(s, "oprio")) return K_ioprio;
if (!strcmp(s, "fup")) return K_ifup;
if (!strcmp(s, "nsmod")) return K_insmod;
if (!strcmp(s, "mport")) return K_import;
break;
case 'k':
if (!strcmp(s, "eycodes")) return K_keycodes;
break;
case 'l':
if (!strcmp(s, "oglevel")) return K_loglevel;
if (!strcmp(s, "oad_persist_props")) return K_load_persist_props;
break;
case 'm':
if (!strcmp(s, "kdir")) return K_mkdir;
if (!strcmp(s, "ount_all")) return K_mount_all;
if (!strcmp(s, "ount")) return K_mount;
break;
case 'o':
if (!strcmp(s, "n")) return K_on;
if (!strcmp(s, "neshot")) return K_oneshot;
if (!strcmp(s, "nrestart")) return K_onrestart;
break;
case 'p':
if (!strcmp(s, "owerctl")) return K_powerctl;
case 'r':
if (!strcmp(s, "estart")) return K_restart;
if (!strcmp(s, "estorecon")) return K_restorecon;
if (!strcmp(s, "mdir")) return K_rmdir;
if (!strcmp(s, "m")) return K_rm;
break;
case 's':
if (!strcmp(s, "eclabel")) return K_seclabel;
if (!strcmp(s, "ervice")) return K_service;
if (!strcmp(s, "etcon")) return K_setcon;
if (!strcmp(s, "etenforce")) return K_setenforce;
if (!strcmp(s, "etenv")) return K_setenv;
if (!strcmp(s, "etkey")) return K_setkey;
if (!strcmp(s, "etprop")) return K_setprop;
if (!strcmp(s, "etrlimit")) return K_setrlimit;
if (!strcmp(s, "etsebool")) return K_setsebool;
if (!strcmp(s, "ocket")) return K_socket;
if (!strcmp(s, "tart")) return K_start;
if (!strcmp(s, "top")) return K_stop;
if (!strcmp(s, "wapon_all")) return K_swapon_all;
if (!strcmp(s, "ymlink")) return K_symlink;
if (!strcmp(s, "ysclktz")) return K_sysclktz;
break;
case 't':
if (!strcmp(s, "rigger")) return K_trigger;
break;
case 'u':
if (!strcmp(s, "ser")) return K_user;
break;
case 'w':
if (!strcmp(s, "rite")) return K_write;
if (!strcmp(s, "ait")) return K_wait;
break;
}
return K_UNKNOWN;
}
lookup_keyword()主要用解析出args中的关键字,这个函数本身没有什么特别,也非常简单,但是其实现方法在我们自己实现类似通过switch等的查找判断时是值得借鉴的,即:先通过单词的首字母将内容分组,在定位到哪一个组后再依次比较。这样就减少了程序中比较的次数,提高了效率。
[cpp] view
plaincopyprint?
case T_NEWLINE:
state.line++;//一行读取完成后,行号加1
if (nargs) {//如果刚才解析的一行为语法行(非注释等),则nargs的值不为0,需要对这一行进行语法解析
int kw = lookup_keyword(args[0]);//init.rc中每一个语法行均是以一个keyword开头的,因此args[0]即表示这一行的keyword
if (kw_is(kw, SECTION)) {
state.parse_line(&state, 0, 0);
parse_new_section(&state, kw, nargs, args);
} else {
state.parse_line(&state, nargs, args);
}
nargs = 0;//复位
}
break;
在parse_config()中,在找的keyword以后,接下来会判断这个keyword是否是section,是则走解析section的逻辑,否则走其他逻辑。下面我们看一下kw_is的实现:
[cpp] view
plaincopyprint?
#define kw_is(kw, type) (keyword_info[kw].flags & (type))
可以看出kw_is只不过是一个宏定义,这里又引出了keyword_info,下面让我们一起来看一下keyword的相关定义:
[cpp] view
plaincopyprint?
#ifndef KEYWORD//如果没有定义KEYWORD则执行下面的分支
//声明一些函数,这些函数即Action的执行函数
int do_chroot(int nargs, char **args);
int do_chdir(int nargs, char **args);
int do_class_start(int nargs, char **args);
int do_class_stop(int nargs, char **args);
int do_class_reset(int nargs, char **args);
int do_domainname(int nargs, char **args);
int do_exec(int nargs, char **args);
int do_export(int nargs, char **args);
int do_hostname(int nargs, char **args);
int do_ifup(int nargs, char **args);
int do_insmod(int nargs, char **args);
int do_mkdir(int nargs, char **args);
int do_mount_all(int nargs, char **args);
int do_mount(int nargs, char **args);
int do_powerctl(int nargs, char **args);
int do_restart(int nargs, char **args);
int do_restorecon(int nargs, char **args);
int do_rm(int nargs, char **args);
int do_rmdir(int nargs, char **args);
int do_setcon(int nargs, char **args);
int do_setenforce(int nargs, char **args);
int do_setkey(int nargs, char **args);
int do_setprop(int nargs, char **args);
int do_setrlimit(int nargs, char **args);
int do_setsebool(int nargs, char **args);
int do_start(int nargs, char **args);
int do_stop(int nargs, char **args);
int do_swapon_all(int nargs, char **args);
int do_trigger(int nargs, char **args);
int do_symlink(int nargs, char **args);
int do_sysclktz(int nargs, char **args);
int do_write(int nargs, char **args);
int do_copy(int nargs, char **args);
int do_chown(int nargs, char **args);
int do_chmod(int nargs, char **args);
int do_loglevel(int nargs, char **args);
int do_load_persist_props(int nargs, char **args);
int do_wait(int nargs, char **args);
#define __MAKE_KEYWORD_ENUM__//定义一个宏
/*
* 定义KEYWORD宏,这里KEYWORD宏中有四个参数,其各自的含义如下:
* symbol表示keyword的名称(即init.rc中的关键字);
* flags表示keyword的类型,包括SECTION、COMMAND和OPTION三种类型,其定义在init_parser.c中;
* nargs表示参数的个数,即:该keyword需要几个参数
* func表示该keyword所对应的处理函数。
*
* KEYWORD宏虽然有四个参数,但是这里只用到了symbol,其中K_##symbol中的##表示连接的意思,
* 即最后的得到的值为K_symbol。
*/
#define KEYWORD(symbol, flags, nargs, func) K_##symbol,
enum {
K_UNKNOWN,
#endif
KEYWORD(capability, OPTION, 0, 0)//根据上面KEYWORD的宏定义,这一行就变成了K_capability,
KEYWORD(chdir, COMMAND, 1, do_chdir)//key_chdir,后面的依次类推
KEYWORD(chroot, COMMAND, 1, do_chroot)
KEYWORD(class, OPTION, 0, 0)
KEYWORD(class_start, COMMAND, 1, do_class_start)
KEYWORD(class_stop, COMMAND, 1, do_class_stop)
KEYWORD(class_reset, COMMAND, 1, do_class_reset)
KEYWORD(console, OPTION, 0, 0)
KEYWORD(critical, OPTION, 0, 0)
KEYWORD(disabled, OPTION, 0, 0)
KEYWORD(domainname, COMMAND, 1, do_domainname)
KEYWORD(exec, COMMAND, 1, do_exec)
KEYWORD(export, COMMAND, 2, do_export)
KEYWORD(group, OPTION, 0, 0)
KEYWORD(hostname, COMMAND, 1, do_hostname)
KEYWORD(ifup, COMMAND, 1, do_ifup)
KEYWORD(insmod, COMMAND, 1, do_insmod)
KEYWORD(import, SECTION, 1, 0)
KEYWORD(keycodes, OPTION, 0, 0)
KEYWORD(mkdir, COMMAND, 1, do_mkdir)
KEYWORD(mount_all, COMMAND, 1, do_mount_all)
KEYWORD(mount, COMMAND, 3, do_mount)
KEYWORD(on, SECTION, 0, 0)
KEYWORD(oneshot, OPTION, 0, 0)
KEYWORD(onrestart, OPTION, 0, 0)
KEYWORD(powerctl, COMMAND, 1, do_powerctl)
KEYWORD(restart, COMMAND, 1, do_restart)
KEYWORD(restorecon, COMMAND, 1, do_restorecon)
KEYWORD(rm, COMMAND, 1, do_rm)
KEYWORD(rmdir, COMMAND, 1, do_rmdir)
KEYWORD(seclabel, OPTION, 0, 0)
KEYWORD(service, SECTION, 0, 0)
KEYWORD(setcon, COMMAND, 1, do_setcon)
KEYWORD(setenforce, COMMAND, 1, do_setenforce)
KEYWORD(setenv, OPTION, 2, 0)
KEYWORD(setkey, COMMAND, 0, do_setkey)
KEYWORD(setprop, COMMAND, 2, do_setprop)
KEYWORD(setrlimit, COMMAND, 3, do_setrlimit)
KEYWORD(setsebool, COMMAND, 2, do_setsebool)
KEYWORD(socket, OPTION, 0, 0)
KEYWORD(start, COMMAND, 1, do_start)
KEYWORD(stop, COMMAND, 1, do_stop)
KEYWORD(swapon_all, COMMAND, 1, do_swapon_all)
KEYWORD(trigger, COMMAND, 1, do_trigger)
KEYWORD(symlink, COMMAND, 1, do_symlink)
KEYWORD(sysclktz, COMMAND, 1, do_sysclktz)
KEYWORD(user, OPTION, 0, 0)
KEYWORD(wait, COMMAND, 1, do_wait)
KEYWORD(write, COMMAND, 2, do_write)
KEYWORD(copy, COMMAND, 2, do_copy)
KEYWORD(chown, COMMAND, 2, do_chown)
KEYWORD(chmod, COMMAND, 2, do_chmod)
KEYWORD(loglevel, COMMAND, 1, do_loglevel)
KEYWORD(load_persist_props, COMMAND, 0, do_load_persist_props)
KEYWORD(ioprio, OPTION, 0, 0)
#ifdef __MAKE_KEYWORD_ENUM__
KEYWORD_COUNT,
};
#undef __MAKE_KEYWORD_ENUM__
#undef KEYWORD//取消KEYWORD宏的定义
#endif
看一下keyword在init_parse.c中是如何被使用的:
[cpp] view
plaincopyprint?
#include "keywords.h"
#define KEYWORD(symbol, flags, nargs, func) \
[ K_##symbol ] = { #symbol, func, nargs + 1, flags, },
struct {
const char *name;//关键字的名称
int (*func)(int nargs, char **args);//对应关键字的处理函数
unsigned char nargs;//参数个数,每个关键字的参数个数是固定的
unsigned char flags;//关键字属性,包括:SECTION、OPTION和COMMAND,其中COMMAND有对应的处理函数,见keyword的定义。
} keyword_info[KEYWORD_COUNT] = {
[ K_UNKNOWN ] = { "unknown", 0, 0, 0 },
#include "keywords.h"
};
#undef KEYWORD
#define kw_is(kw, type) (keyword_info[kw].flags & (type))
#define kw_name(kw) (keyword_info[kw].name)
#define kw_func(kw) (keyword_info[kw].func)
#define kw_nargs(kw) (keyword_info[kw].nargs)
从上面的代码我们看到一个很有意思的地方,keyword.h头文件被包含引用了两次。
第一次包含keywords.h时,它声明了一些诸如do_class_start的函数,另外还定义了一个枚举,枚举值为K_class、K_mkdir等关键字。
第二次包含keywords.h后,得到了keyword_info结构体数组,这个keyword_info结构体数组以前定义的枚举值为索引,存储对应的关键字信息。
flags的取值也在init_parse.c中定义:
[cpp] view
plaincopyprint?
#define SECTION 0x01
#define COMMAND 0x02
#define OPTION 0x04
在了解了keyword后,下面我们继续来分析rc脚本的解析,让我们回到之前的代码,继续分析。
[cpp] view
plaincopyprint?
case T_NEWLINE:
state.line++;//一行读取完成后,行号加1
if (nargs) {//如果刚才解析的一行为语法行(非注释等),则nargs的值不为0,需要对这一行进行语法解析
int kw = lookup_keyword(args[0]);//init.rc中每一个语法行均是以一个keyword开头的,因此args[0]即表示这一行的keyword
if (kw_is(kw, SECTION)) {
state.parse_line(&state, 0, 0);
parse_new_section(&state, kw, nargs, args);
} else {
state.parse_line(&state, nargs, args);
}
nargs = 0;//复位
}
break;
解析section的函数为parse_new_section,其实现为:
[cpp] view
plaincopyprint?
void parse_new_section(struct parse_state *state, int kw,
int nargs, char **args)
{
printf("[ %s %s ]\n", args[0],
nargs > 1 ? args[1] : "");
switch(kw) {
case K_service://解析Service
state->context = parse_service(state, nargs, args);//当service_list中不存在同名service时,执行新加入service_list中的service
if (state->context) {//service为新增加的service时,即:<span style="font-family: Arial, Helvetica, sans-serif;">service_list中不存在同名service</span>
state->parse_line = parse_line_service;//制定解析service行的函数为<span style="font-family: Arial, Helvetica, sans-serif;">parse_line_service</span>
return;
}
break;
case K_on://解析section
state->context = parse_action(state, nargs, args);
if (state->context) {
state->parse_line = parse_line_action;
return;
}
break;
case K_import://解析import
parse_import(state, nargs, args);
break;
}
state->parse_line = parse_line_no_op;
}
先看一下service的解析:
[cpp] view
plaincopyprint?
static void *parse_service(struct parse_state *state, int nargs, char **args)
{
struct service *svc;//保持Service相关信息
if (nargs < 3) {
parse_error(state, "services must have a name and a program\n");
return 0;
}
if (!valid_name(args[1])) {
parse_error(state, "invalid service name '%s'\n", args[1]);
return 0;
}
//service_list中是否已存在同名service<span style="white-space:pre"> </span>
svc = service_find_by_name(args[1]);
if (svc) {//<span style="font-family: Arial, Helvetica, sans-serif;">如果已存在同名service则直接返回,不再做其他操作</span>
parse_error(state, "ignored duplicate definition of service '%s'\n", args[1]);
return 0;
}
nargs -= 2;
svc = calloc(1, sizeof(*svc) + sizeof(char*) * nargs);
if (!svc) {
parse_error(state, "out of memory\n");
return 0;
}
svc->name = args[1];
svc->classname = "default";//设置classname为“default”
memcpy(svc->args, args + 2, sizeof(char*) * nargs);
svc->args[nargs] = 0;
svc->nargs = nargs;
svc->onrestart.name = "onrestart";
list_init(&svc->onrestart.commands);
list_add_tail(&service_list, &svc->slist);//将service添加到全局链表service_list中
return svc;
}
init中使用了一个叫做service的结构体来保存与service相关的信息。
@system/core/init/init.h
[cpp] view
plaincopyprint?
struct service {
/* list of all services */
struct listnode slist;//双向链表
const char *name;//service的名字
const char *classname;//service所属class的名字,默认是“default”
unsigned flags;//service的属性
pid_t pid;//进程号
time_t time_started; /* time of last start 上一次启动的时间*/
time_t time_crashed; /* first crash within inspection window 第一次死亡的时间*/
int nr_crashed; /* number of times crashed within window 死亡次数*/
uid_t uid;
gid_t gid;
gid_t supp_gids[NR_SVC_SUPP_GIDS];
size_t nr_supp_gids;
char *seclabel;
struct socketinfo *sockets;//有些service需要使用socket,socketinfo用来描述socket相关信息
struct svcenvinfo *envvars;//service一般运行在一个单独的进程中,envvars用来描述创建这个进程时所需的环境变量信息
//关键字onrestart标示一个OPTION,可是onrestart后面一般跟着COMMAND,下面这个action结构体可用来存储command信息
struct action onrestart; /* Actions to execute on restart. */
/* keycodes for triggering this service via /dev/keychord */
int *keycodes;
int nkeycodes;
int keychord_id;
int ioprio_class;
int ioprio_pri;
int nargs;//参数个数
/* "MUST BE AT THE END OF THE STRUCT" */
char *args[1];//用于存储参数
}; /* ^-------'args' MUST be at the end of this struct! */
从parse_service函数可以看出,它的作用就是讲service添加到service_list列表中,并制定解析函数为parse_line_service,也就是说具体的service的解析靠的是parse_line_service方法。
[cpp] view
plaincopyprint?
static void parse_line_service(struct parse_state *state, int nargs, char **args)
{
struct service *svc = state->context;
struct command *cmd;
int i, kw, kw_nargs;
if (nargs == 0) {
return;
}
svc->ioprio_class = IoSchedClass_NONE;
kw = lookup_keyword(args[0]);
switch (kw) {
case K_capability:
break;
case K_class:
if (nargs != 2) {
parse_error(state, "class option requires a classname\n");
} else {
svc->classname = args[1];
}
break;
case K_console:
svc->flags |= SVC_CONSOLE;
break;
case K_disabled:
svc->flags |= SVC_DISABLED;
svc->flags |= SVC_RC_DISABLED;
break;
case K_ioprio:
if (nargs != 3) {
parse_error(state, "ioprio optin usage: ioprio <rt|be|idle> <ioprio 0-7>\n");
} else {
svc->ioprio_pri = strtoul(args[2], 0, 8);
if (svc->ioprio_pri < 0 || svc->ioprio_pri > 7) {
parse_error(state, "priority value must be range 0 - 7\n");
break;
}
if (!strcmp(args[1], "rt")) {
svc->ioprio_class = IoSchedClass_RT;
} else if (!strcmp(args[1], "be")) {
svc->ioprio_class = IoSchedClass_BE;
} else if (!strcmp(args[1], "idle")) {
svc->ioprio_class = IoSchedClass_IDLE;
} else {
parse_error(state, "ioprio option usage: ioprio <rt|be|idle> <0-7>\n");
}
}
break;
case K_group:
if (nargs < 2) {
parse_error(state, "group option requires a group id\n");
} else if (nargs > NR_SVC_SUPP_GIDS + 2) {
parse_error(state, "group option accepts at most %d supp. groups\n",
NR_SVC_SUPP_GIDS);
} else {
int n;
svc->gid = decode_uid(args[1]);
for (n = 2; n < nargs; n++) {
svc->supp_gids[n-2] = decode_uid(args
);
}
svc->nr_supp_gids = n - 2;
}
break;
case K_keycodes:
if (nargs < 2) {
parse_error(state, "keycodes option requires atleast one keycode\n");
} else {
svc->keycodes = malloc((nargs - 1) * sizeof(svc->keycodes[0]));
if (!svc->keycodes) {
parse_error(state, "could not allocate keycodes\n");
} else {
svc->nkeycodes = nargs - 1;
for (i = 1; i < nargs; i++) {
svc->keycodes[i - 1] = atoi(args[i]);
}
}
}
break;
case K_oneshot:
svc->flags |= SVC_ONESHOT;
break;
case K_onrestart:
nargs--;
args++;
kw = lookup_keyword(args[0]);
if (!kw_is(kw, COMMAND)) {
parse_error(state, "invalid command '%s'\n", args[0]);
break;
}
kw_nargs = kw_nargs(kw);
if (nargs < kw_nargs) {
parse_error(state, "%s requires %d %s\n", args[0], kw_nargs - 1,
kw_nargs > 2 ? "arguments" : "argument");
break;
}
cmd = malloc(sizeof(*cmd) + sizeof(char*) * nargs);
cmd->func = kw_func(kw);
cmd->nargs = nargs;
memcpy(cmd->args, args, sizeof(char*) * nargs);
list_add_tail(&svc->onrestart.commands, &cmd->clist);
break;
case K_critical:
svc->flags |= SVC_CRITICAL;
break;
case K_setenv: { /* name value */
struct svcenvinfo *ei;
if (nargs < 2) {
parse_error(state, "setenv option requires name and value arguments\n");
break;
}
ei = calloc(1, sizeof(*ei));
if (!ei) {
parse_error(state, "out of memory\n");
break;
}
ei->name = args[1];
ei->value = args[2];
ei->next = svc->envvars;
svc->envvars = ei;
break;
}
case K_socket: {/* name type perm [ uid gid ] */
struct socketinfo *si;
if (nargs < 4) {
parse_error(state, "socket option requires name, type, perm arguments\n");
break;
}
if (strcmp(args[2],"dgram") && strcmp(args[2],"stream")
&& strcmp(args[2],"seqpacket")) {
parse_error(state, "socket type must be 'dgram', 'stream' or 'seqpacket'\n");
break;
}
si = calloc(1, sizeof(*si));
if (!si) {
parse_error(state, "out of memory\n");
break;
}
si->name = args[1];
si->type = args[2];
si->perm = strtoul(args[3], 0, 8);
if (nargs > 4)
si->uid = decode_uid(args[4]);
if (nargs > 5)
si->gid = decode_uid(args[5]);
si->next = svc->sockets;
svc->sockets = si;
break;
}
case K_user:
if (nargs != 2) {
parse_error(state, "user option requires a user id\n");
} else {
svc->uid = decode_uid(args[1]);
}
break;
case K_seclabel:
if (nargs != 2) {
parse_error(state, "seclabel option requires a label string\n");
} else {
svc->seclabel = args[1];
}
break;
default:
parse_error(state, "invalid option '%s'\n", args[0]);
}
}
可以看出parse_line_service中会根据keyword找的对应的keyword的处理函数,具体进程处理。
section的处理与service类似,通过分析init.rc的解析过程,我们知道,所谓的解析就是将rc脚本中的内容通过解析,填充到service_list和action_list中去。那他们是在哪里进行调用的呢,让我们回忆一下init进程中main函数的实现。
[cpp] view
plaincopyprint?
INFO("reading config file\n");
init_parse_config_file("/init.rc");//解析init.rc配置文件
action_for_each_trigger("early-init", action_add_queue_tail);
queue_builtin_action(wait_for_coldboot_done_action, "wait_for_coldboot_done");
queue_builtin_action(mix_hwrng_into_linux_rng_action, "mix_hwrng_into_linux_rng");
queue_builtin_action(keychord_init_action, "keychord_init");
queue_builtin_action(console_init_action, "console_init");
/* execute all the boot actions to get us started */
action_for_each_trigger("init", action_add_queue_tail);
/* skip mounting filesystems in charger mode */
if (!is_charger) {
action_for_each_trigger("early-fs", action_add_queue_tail);
action_for_each_trigger("fs", action_add_queue_tail);
action_for_each_trigger("post-fs", action_add_queue_tail);
action_for_each_trigger("post-fs-data", action_add_queue_tail);
}
OK,到这里init.rc脚本的解析就完了。
在前面的一篇文章中分析了init进程的启动过程和main函数,本文将着重对配置文件(init.rc)的解析做一下分析。
init.rc脚本语法
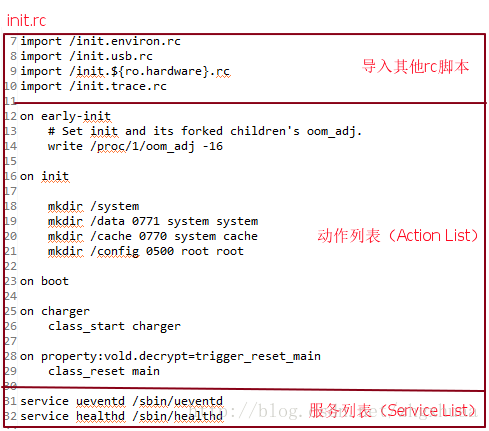
init.rc文件不同于init进程,init进程仅当编译完Android后才会生成,而init.rc文件存在于Android平台源代码中。init.rc在源代码中的位置为:@system/core/rootdir/init.rc。init.rc文件的大致结构如下图所示:关于init.rc脚本的介绍,在@system/core/init/readme.txt中有完整的介绍,这里不再赘述,不想看英文的朋友也可以看下面的部分,这个部分关于rc脚本的介绍转自http://blog.csdn.net/nokiaguy/article/details/9109491。相当于readme的翻译吧。
init.rc文件并不是普通的配置文件,而是由一种被称为“Android初始化语言”(Android Init Language,这里简称为AIL)的脚本写成的文件。在了解init如何解析init.rc文件之前,先了解AIL非常必要,否则机械地分析init.c及其相关文件的源代码毫无意义。
为了学习AIL,读者可以到自己Android手机的根目录寻找init.rc文件,最好下载到本地以便查看,如果有编译好的Android源代码,在<Android源代码根目录>out/target/product/geneic/root目录也可找到init.rc文件。
AIL由如下4部分组成。
1. 动作(Actions)
2. 命令(Commands)
3.服务(Services)
4. 选项(Options)
这4部分都是面向行的代码,也就是说用回车换行符作为每一条语句的分隔符。而每一行的代码由多个符号(Tokens)表示。可以使用反斜杠转义符在Token中插入空格。双引号可以将多个由空格分隔的Tokens合成一个Tokens。如果一行写不下,可以在行尾加上反斜杠,来连接下一行。也就是说,可以用反斜杠将多行代码连接成一行代码。
AIL的注释与很多Shell脚本一行,以#开头。
AIL在编写时需要分成多个部分(Section),而每一部分的开头需要指定Actions或Services。也就是说,每一个Actions或Services确定一个Section。而所有的Commands和Options只能属于最近定义的Section。如果Commands和Options在第一个Section之前被定义,它们将被忽略。
Actions和Services的名称必须唯一。如果有两个或多个Action或Service拥有同样的名称,那么init在执行它们时将抛出错误,并忽略这些Action和Service。
下面来看看Actions、Services、Commands和Options分别应如何设置。
Actions的语法格式如下:
[plain] view
plaincopy
on <trigger>
<command>
<command>
<command>
也就是说Actions是以关键字on开头的,然后跟一个触发器,接下来是若干命令。例如,下面就是一个标准的Action
[plain] view
plaincopy
on boot
ifup lo
hostname localhost
domainname localdomain
其中boot是触发器,下面三行是command
那么init.rc到底支持哪些触发器呢?目前init.rc支持如下5类触发器。
1. boot
这是init执行后第一个被触发Trigger,也就是在 /init.rc被装载之后执行该Trigger
2. <name>=<value>
当属性<name>被设置成<value>时被触发。例如,
on property:vold.decrypt=trigger_reset_main
class_reset main
3. device-added-<path>
当设备节点被添加时触发
4. device-removed-<path>
当设备节点被移除时添加
5. service-exited-<name>
会在一个特定的服务退出时触发
Actions后需要跟若干个命令,这些命令如下:
1. exec <path> [<argument> ]*
创建和执行一个程序(<path>)。在程序完全执行前,init将会阻塞。由于它不是内置命令,应尽量避免使用exec ,它可能会引起init执行超时。
2. export <name> <value>
在全局环境中将 <name>变量的值设为<value>。(这将会被所有在这命令之后运行的进程所继承)
3. ifup <interface>
启动网络接口
4. import <filename>
指定要解析的其他配置文件。常被用于当前配置文件的扩展
5. hostname <name>
设置主机名
6. chdir <directory>
改变工作目录
7. chmod <octal-mode><path>
改变文件的访问权限
8. chown <owner><group> <path>
更改文件的所有者和组
9. chroot <directory>
改变处理根目录
10. class_start<serviceclass>
启动所有指定服务类下的未运行服务。
11 class_stop<serviceclass>
停止指定服务类下的所有已运行的服务。
12. domainname <name>
设置域名
13. insmod <path>
加载<path>指定的驱动模块
14. mkdir <path> [mode][owner] [group]
创建一个目录<path> ,可以选择性地指定mode、owner以及group。如果没有指定,默认的权限为755,并属于root用户和 root组。
15. mount <type> <device> <dir> [<mountoption> ]*
试图在目录<dir>挂载指定的设备。<device> 可以是mtd@name的形式指定一个mtd块设备。<mountoption>包括 "ro"、"rw"、"re
16. setkey
保留,暂时未用
17. setprop <name><value>
将系统属性<name>的值设为<value>。
18. setrlimit <resource> <cur> <max>
设置<resource>的rlimit (资源限制)
19. start <service>
启动指定服务(如果此服务还未运行)。
20.stop<service>
停止指定服务(如果此服务在运行中)。
21. symlink <target> <path>
创建一个指向<path>的软连接<target>。
22. sysclktz <mins_west_of_gmt>
设置系统时钟基准(0代表时钟滴答以格林威治平均时(GMT)为准)
23. trigger <event>
触发一个事件。用于Action排队
24. wait <path> [<timeout> ]
等待一个文件是否存在,当文件存在时立即返回,或到<timeout>指定的超时时间后返回,如果不指定<timeout>,默认超时时间是5秒。
25. write <path> <string> [ <string> ]*
向<path>指定的文件写入一个或多个字符串。
Services (服务)是一个程序,他在初始化时启动,并在退出时重启(可选)。Services (服务)的形式如下:
[plain] view
plaincopy
service <name> <pathname> [ <argument> ]*
<option>
<option>
例如,下面是一个标准的Service用法
[plain] view
plaincopy
service servicemanager /system/bin/servicemanager
class core
user system
group system
critical
onrestart restart zygote
onrestart restart media
onrestart restart surfaceflinger
onrestart restart drm
Services的选项是服务的修饰符,可以影响服务如何以及怎样运行。服务支持的选项如下:
1. critical
表明这是一个非常重要的服务。如果该服务4分钟内退出大于4次,系统将会重启并进入 Recovery (恢复)模式。
2. disabled
表明这个服务不会同与他同trigger (触发器)下的服务自动启动。该服务必须被明确的按名启动。
3. setenv <name><value>
在进程启动时将环境变量<name>设置为<value>。
4. socket <name><type> <perm> [ <user> [ <group> ] ]
Create a unix domain socketnamed /dev/socket/<name> and pass
its fd to the launchedprocess. <type> must be"dgram", "stream" or "seqpacket".
User and group default to0.
创建一个unix域的名为/dev/socket/<name> 的套接字,并传递它的文件描述符给已启动的进程。<type> 必须是 "dgram","stream" 或"seqpacket"。用户和组默认是0。
5. user <username>
在启动这个服务前改变该服务的用户名。此时默认为 root。
6. group <groupname> [<groupname> ]*
在启动这个服务前改变该服务的组名。除了(必需的)第一个组名,附加的组名通常被用于设置进程的补充组(通过setgroups函数),档案默认是root。
7. oneshot
服务退出时不重启。
8. class <name>
指定一个服务类。所有同一类的服务可以同时启动和停止。如果不通过class选项指定一个类,则默认为"default"类服务。
9. onrestart
当服务重启,执行一个命令(下详)。
init.rc脚本分析
在上一篇文章中说过,init将动作执行的时间划分为几个阶段,按照被执行的先后顺序依次为:early-init、init、early-boot、boot。在init进程的main()方法中被调用的先后顺序决定了它们的先后(直接原因), 根本原因是:各个阶段的任务不同导致后面的对前面的有依赖,所以这里的先后顺序是不能乱调整的。@system/core/init/init.c
early-init主要用于设置init进程(进程号为1)的oom_adj的值,以及启动ueventd进程。oom_adj是Linux和Android中用来表示进程重要性的一个值,取值范围为[-17, 15]。在Android中系统在杀死进程时会根据oom_adj和空闲内存大小作为依据,oom_adj越大越容易被杀死。
Android将程序分成以下几类,按照重要性依次降低的顺序:
| 名 称 | oom_adj | 解释 |
| FOREGROUD_APP | 0 | 前 台程序,可以理解为你正在使用的程序 |
| VISIBLE_APP | 1 | 用户可见的程序 |
| SECONDARY_SERVER | 2 | 后 台服务,比如说QQ会在后台运行服务 |
| HOME_APP | 4 | HOME,就是主界面 |
| HIDDEN_APP | 7 | 被 隐藏的程序 |
| CONTENT_PROVIDER | 14 | 内容提供者, |
| EMPTY_APP | 15 | 空程序,既不提供服务,也不提供内容 |
plaincopyprint?
on early-init
# Set init and its forked children's oom_adj.
write /proc/1/oom_adj -16
# Set the security context for the init process.
# This should occur before anything else (e.g. ueventd) is started.
setcon u:r:init:s0
start ueventd
这里设置init进程的oom_adj的值为-16.这里要说明的是,我们现在分析的是init.rc文件,在文件头部我们发现还导入了其他的rc脚本。其他rc脚本中的文件结构与init.rc是类似的。在init进程解析rc脚本时,会将所有rc脚本中的配置安装执行阶段一并解析。即:init.rc中的early-init与init,${hardware}.rc中的early-init是一并解析的。
在执行完early-init以后,接下来就是init阶段。在init阶段主要用来:设置环境变量,创建和挂在文件节点。下面是init接的的不分代码截选:
@system/core/rootdir/init.environ.rc.in
[cpp] view
plaincopyprint?
# set up the global environment
on init
export PATH /sbin:/vendor/bin:/system/sbin:/system/bin:/system/xbin
export LD_LIBRARY_PATH /vendor/lib:/system/lib
export ANDROID_BOOTLOGO 1
export ANDROID_ROOT /system
export ANDROID_ASSETS /system/app
export ANDROID_DATA /data
export ANDROID_STORAGE /storage
export ASEC_MOUNTPOINT /mnt/asec
export LOOP_MOUNTPOINT /mnt/obb
export BOOTCLASSPATH %BOOTCLASSPATH%
以前设置环境变量这一段时在init.rc中的,现在放到了init.environ.rc.in,这样代码也更清晰一些。
@system/core/rootdir/init.rc
[cpp] view
plaincopyprint?
on init
sysclktz 0
loglevel 3
# Backward compatibility
symlink /system/etc /etc
symlink /sys/kernel/debug /d
# Right now vendor lives on the same filesystem as system,
# but someday that may change.
symlink /system/vendor /vendor
# Create cgroup mount point for cpu accounting
mkdir /acct
mount cgroup none /acct cpuacct
mkdir /acct/uid
mkdir /system
mkdir /data 0771 system system
mkdir /cache 0770 system cache
mkdir /config 0500 root root
接下来是fs相关的几个过程,它们主要用于文件系统的挂载,下面是截取的一小部分代码:
[cpp] view
plaincopyprint?
on post-fs
# once everything is setup, no need to modify /
mount rootfs rootfs / ro remount
# mount shared so changes propagate into child namespaces
mount rootfs rootfs / shared rec
mount tmpfs tmpfs /mnt/secure private rec
# We chown/chmod /cache again so because mount is run as root + defaults
chown system cache /cache
chmod 0770 /cache
# We restorecon /cache in case the cache partition has been reset.
restorecon /cache
如果你看过以前的版本的init.rc脚本,看到这里会想起,应该还有几行:
[cpp] view
plaincopyprint?
mount yaffs2 mtd@system /system
mount yaffs2 mtd@userdata /data
这两行用于挂载/system分区和/data分区到yaffs2文件系统。手机领域有多种不同的内存设备,其中NAND闪存设备以其低功耗、重量轻、性能佳等优良特性,受到绝大多数厂商的青睐。NAND闪存采用yaffs2文件系统。
可以看出在Android 4.4中默认已经不再使用yaffs2。在完成文件系统的创建和挂载后,完整的Android根文件系统结构如下:
接下来看一下boot部分,该部分主要用于设置应用程序终止条件,应用程序驱动目录及文件权限等。下面是一部分代码片段:
[cpp] view
plaincopyprint?
on boot
# basic network init
ifup lo
hostname localhost
domainname localdomain
# set RLIMIT_NICE to allow priorities from 19 to -20
setrlimit 13 40 40
# Memory management. Basic kernel parameters, and allow the high
# level system server to be able to adjust the kernel OOM driver
# parameters to match how it is managing things.
write /proc/sys/vm/overcommit_memory 1
write /proc/sys/vm/min_free_order_shift 4
chown root system /sys/module/lowmemorykiller/parameters/adj
chmod 0664 /sys/module/lowmemorykiller/parameters/adj
chown root system /sys/module/lowmemorykiller/parameters/minfree
chmod 0664 /sys/module/lowmemorykiller/parameters/minfree
class_start core
class_start main
在on boot部分,我们可以发现许多”on property:<name> = <value>"的代码片段,这些是根据属性的触发器,但相应的属性满足一定的条件时,就会触发相应的动作。此外,还有许多service字段,service后面第一项表示服务的名称,第二项表示服务的路径,接下来的第2行等是服务的附加内容,配合服务使用,主要包含运行权限、条件以及重启等相关选项。
解析配置文件
前面了解了init.rc脚本的相关内容,接下来我们分析一下init进程是如何解析rc脚本的。首先,在init进程的main()函数中调用init_parse_config_file()函数对属性进行解析,下面就来看一下这个函数:[cpp] view
plaincopyprint?
init_parse_config_file("/init.rc");//解析init.rc配置文件
@system/core/init/init_parser.c
[cpp] view
plaincopyprint?
int init_parse_config_file(const char *fn)
{
char *data;
data = read_file(fn, 0);
if (!data) return -1;
parse_config(fn, data);
DUMP();
return 0;
}
read_file(fn, 0)函数将fn指针指向的路径(这里即:/init.rc)所对应的文件读取到内存中,保存为字符串形式,并返回字符串在内存中的地址;然后parse_config会对文件进行解析,生成动作列表(Action List)和服务列表(Service List)。关于read_file()函数的实现在@system/core/init/util.c中。下面是parse_config()的实现:
[cpp] view
plaincopyprint?
static void parse_config(const char *fn, char *s)
{
struct parse_state state;
struct listnode import_list;//导入链表,用于保持在init.rc中通过import导入的其他rc文件
struct listnode *node;
char *args[INIT_PARSER_MAXARGS];
int nargs;
nargs = 0;
state.filename = fn;//初始化filename的值为init.rc文件
state.line = 0;//初始化行号为0
state.ptr = s;//初始化ptr指向s,即read_file读入到内存中的init.rc文件的首地址
state.nexttoken = 0;//初始化nexttoken的值为0
state.parse_line = parse_line_no_op;//初始化行解析函数
list_init(&import_list);
state.priv = &import_list;
for (;;) {
switch (next_token(&state)) {
case T_EOF://如果返回为T_EOF,表示init.rc已经解析完成,则跳到parser_done解析import进来的其他rc脚本
state.parse_line(&state, 0, 0);
goto parser_done;
case T_NEWLINE:
state.line++;//一行读取完成后,行号加1
if (nargs) {//如果刚才解析的一行为语法行(非注释等),则nargs的值不为0,需要对这一行进行语法解析
int kw = lookup_keyword(args[0]);//init.rc中每一个语法行均是以一个keyword开头的,因此args[0]即表示这一行的keyword
if (kw_is(kw, SECTION)) {
state.parse_line(&state, 0, 0);
parse_new_section(&state, kw, nargs, args);
} else {
state.parse_line(&state, nargs, args);
}
nargs = 0;//复位
}
break;
case T_TEXT://将nexttoken解析的一个text保存到args字符串数组中,nargs的最大值为INIT_PARSER_MAXARGS(64),即init.rc中一行最多不能超过INIT_PARSER_MAXARGS个text(单词)
if (nargs < INIT_PARSER_MAXARGS) {
args[nargs++] = state.text;
}
break;
}
}
parser_done:
list_for_each(node, &import_list) {
struct import *import = node_to_item(node, struct import, list);
int ret;
INFO("importing '%s'", import->filename);
ret = init_parse_config_file(import->filename);
if (ret)
ERROR("could not import file '%s' from '%s'\n",
import->filename, fn);
}
}
parse_config()函数,代码虽然很短,实际上却比较复杂。接下来将对其进行详细分析。首先看一下struct parse_state的定义:
[cpp] view
plaincopyprint?
struct parse_state
{
char *ptr;//指针,指向剩余的尚未被解析的数据(即:ptr指向当前解析到的位置)
char *text;//一行文本
int line; //行号
int nexttoken;//下一行的标示,T_EOF标示文件结束,T_TEXT表示需要进行解释的文本,T_NEWLINE标示一个空行或者是注释行
void *context;//一个action或者service
void (*parse_line)(struct parse_state *state, int nargs, char **args);//函数指针,指向当前行的解析函数
const char *filename;//解析的rc文件
void *priv;//执行import链表的指针
};
next_token()以行为单位分割参数传递过来的字符串。
@system/core/init/parser.c
[cpp] view
plaincopyprint?
int next_token(struct parse_state *state)
{
char *x = state->ptr;
char *s;
if (state->nexttoken) {//nexttoken的值为0
int t = state->nexttoken;
state->nexttoken = 0;
return t;
}
for (;;) {
switch (*x) {
case 0://到底末尾,解析完成
state->ptr = x;
return T_EOF;
case '\n'://换行符,返回T_NEWLINE,表示下一个token是新的一行
x++;
state->ptr = x;
return T_NEWLINE;
case ' '://忽略空格、制表符等
case '\t':
case '\r':
x++;
continue;
case '#'://在当前解析到的字符为#号时,将指针一直移动到#行的末尾,然后判断下一个字符是T_NEWLINE还是T_EOF
while (*x && (*x != '\n')) x++;//注意x++,当指针移动到#行末尾时,x执行末尾的下一个字符
if (*x == '\n') {
state->ptr = x+1;
return T_NEWLINE;
} else {
state->ptr = x;
return T_EOF;
}
default:
goto text;//解析的为普通文本
}
}
textdone://x指向一个单词的开头位置,s指向末尾位置,将s设置为0(C字符串末尾为0),即表示单词结束
state->ptr = x;
*s = 0;
return T_TEXT;
text:
state->text = s = x;
textresume:
for (;;) {
switch (*x) {
case 0:
goto textdone;
case ' ':
case '\t':
case '\r':
x++;
goto textdone;
case '\n':
state->nexttoken = T_NEWLINE;
x++;
goto textdone;
case '"':
x++;
for (;;) {
switch (*x) {
case 0:
/* unterminated quoted thing */
state->ptr = x;
return T_EOF;
case '"':
x++;
goto textresume;
default:
*s++ = *x++;
}
}
break;
case '\\':
x++;
switch (*x) {
case 0:
goto textdone;
case 'n':
*s++ = '\n';
break;
case 'r':
*s++ = '\r';
break;
case 't':
*s++ = '\t';
break;
case '\\':
*s++ = '\\';
break;
case '\r':
/* \ <cr> <lf> -> line continuation */
if (x[1] != '\n') {
x++;
continue;
}
case '\n':
/* \ <lf> -> line continuation */
state->line++;
x++;
/* eat any extra whitespace */
while((*x == ' ') || (*x == '\t')) x++;
continue;
default:
/* unknown escape -- just copy */
*s++ = *x++;
}
continue;
default:
*s++ = *x++;
}
}
return T_EOF;
}
在parse_config()中通过next_token从rc脚本中解析出一行行的rc语句,下面看一下另一个重要的函数lookup_keyword()的实现:
[cpp] view
plaincopyprint?
int lookup_keyword(const char *s)
{
switch (*s++) {
case 'c':
if (!strcmp(s, "opy")) return K_copy;
if (!strcmp(s, "apability")) return K_capability;
if (!strcmp(s, "hdir")) return K_chdir;
if (!strcmp(s, "hroot")) return K_chroot;
if (!strcmp(s, "lass")) return K_class;
if (!strcmp(s, "lass_start")) return K_class_start;
if (!strcmp(s, "lass_stop")) return K_class_stop;
if (!strcmp(s, "lass_reset")) return K_class_reset;
if (!strcmp(s, "onsole")) return K_console;
if (!strcmp(s, "hown")) return K_chown;
if (!strcmp(s, "hmod")) return K_chmod;
if (!strcmp(s, "ritical")) return K_critical;
break;
case 'd':
if (!strcmp(s, "isabled")) return K_disabled;
if (!strcmp(s, "omainname")) return K_domainname;
break;
case 'e':
if (!strcmp(s, "xec")) return K_exec;
if (!strcmp(s, "xport")) return K_export;
break;
case 'g':
if (!strcmp(s, "roup")) return K_group;
break;
case 'h':
if (!strcmp(s, "ostname")) return K_hostname;
break;
case 'i':
if (!strcmp(s, "oprio")) return K_ioprio;
if (!strcmp(s, "fup")) return K_ifup;
if (!strcmp(s, "nsmod")) return K_insmod;
if (!strcmp(s, "mport")) return K_import;
break;
case 'k':
if (!strcmp(s, "eycodes")) return K_keycodes;
break;
case 'l':
if (!strcmp(s, "oglevel")) return K_loglevel;
if (!strcmp(s, "oad_persist_props")) return K_load_persist_props;
break;
case 'm':
if (!strcmp(s, "kdir")) return K_mkdir;
if (!strcmp(s, "ount_all")) return K_mount_all;
if (!strcmp(s, "ount")) return K_mount;
break;
case 'o':
if (!strcmp(s, "n")) return K_on;
if (!strcmp(s, "neshot")) return K_oneshot;
if (!strcmp(s, "nrestart")) return K_onrestart;
break;
case 'p':
if (!strcmp(s, "owerctl")) return K_powerctl;
case 'r':
if (!strcmp(s, "estart")) return K_restart;
if (!strcmp(s, "estorecon")) return K_restorecon;
if (!strcmp(s, "mdir")) return K_rmdir;
if (!strcmp(s, "m")) return K_rm;
break;
case 's':
if (!strcmp(s, "eclabel")) return K_seclabel;
if (!strcmp(s, "ervice")) return K_service;
if (!strcmp(s, "etcon")) return K_setcon;
if (!strcmp(s, "etenforce")) return K_setenforce;
if (!strcmp(s, "etenv")) return K_setenv;
if (!strcmp(s, "etkey")) return K_setkey;
if (!strcmp(s, "etprop")) return K_setprop;
if (!strcmp(s, "etrlimit")) return K_setrlimit;
if (!strcmp(s, "etsebool")) return K_setsebool;
if (!strcmp(s, "ocket")) return K_socket;
if (!strcmp(s, "tart")) return K_start;
if (!strcmp(s, "top")) return K_stop;
if (!strcmp(s, "wapon_all")) return K_swapon_all;
if (!strcmp(s, "ymlink")) return K_symlink;
if (!strcmp(s, "ysclktz")) return K_sysclktz;
break;
case 't':
if (!strcmp(s, "rigger")) return K_trigger;
break;
case 'u':
if (!strcmp(s, "ser")) return K_user;
break;
case 'w':
if (!strcmp(s, "rite")) return K_write;
if (!strcmp(s, "ait")) return K_wait;
break;
}
return K_UNKNOWN;
}
lookup_keyword()主要用解析出args中的关键字,这个函数本身没有什么特别,也非常简单,但是其实现方法在我们自己实现类似通过switch等的查找判断时是值得借鉴的,即:先通过单词的首字母将内容分组,在定位到哪一个组后再依次比较。这样就减少了程序中比较的次数,提高了效率。
[cpp] view
plaincopyprint?
case T_NEWLINE:
state.line++;//一行读取完成后,行号加1
if (nargs) {//如果刚才解析的一行为语法行(非注释等),则nargs的值不为0,需要对这一行进行语法解析
int kw = lookup_keyword(args[0]);//init.rc中每一个语法行均是以一个keyword开头的,因此args[0]即表示这一行的keyword
if (kw_is(kw, SECTION)) {
state.parse_line(&state, 0, 0);
parse_new_section(&state, kw, nargs, args);
} else {
state.parse_line(&state, nargs, args);
}
nargs = 0;//复位
}
break;
在parse_config()中,在找的keyword以后,接下来会判断这个keyword是否是section,是则走解析section的逻辑,否则走其他逻辑。下面我们看一下kw_is的实现:
[cpp] view
plaincopyprint?
#define kw_is(kw, type) (keyword_info[kw].flags & (type))
可以看出kw_is只不过是一个宏定义,这里又引出了keyword_info,下面让我们一起来看一下keyword的相关定义:
关键字定义
@system/core/init/keywords.h[cpp] view
plaincopyprint?
#ifndef KEYWORD//如果没有定义KEYWORD则执行下面的分支
//声明一些函数,这些函数即Action的执行函数
int do_chroot(int nargs, char **args);
int do_chdir(int nargs, char **args);
int do_class_start(int nargs, char **args);
int do_class_stop(int nargs, char **args);
int do_class_reset(int nargs, char **args);
int do_domainname(int nargs, char **args);
int do_exec(int nargs, char **args);
int do_export(int nargs, char **args);
int do_hostname(int nargs, char **args);
int do_ifup(int nargs, char **args);
int do_insmod(int nargs, char **args);
int do_mkdir(int nargs, char **args);
int do_mount_all(int nargs, char **args);
int do_mount(int nargs, char **args);
int do_powerctl(int nargs, char **args);
int do_restart(int nargs, char **args);
int do_restorecon(int nargs, char **args);
int do_rm(int nargs, char **args);
int do_rmdir(int nargs, char **args);
int do_setcon(int nargs, char **args);
int do_setenforce(int nargs, char **args);
int do_setkey(int nargs, char **args);
int do_setprop(int nargs, char **args);
int do_setrlimit(int nargs, char **args);
int do_setsebool(int nargs, char **args);
int do_start(int nargs, char **args);
int do_stop(int nargs, char **args);
int do_swapon_all(int nargs, char **args);
int do_trigger(int nargs, char **args);
int do_symlink(int nargs, char **args);
int do_sysclktz(int nargs, char **args);
int do_write(int nargs, char **args);
int do_copy(int nargs, char **args);
int do_chown(int nargs, char **args);
int do_chmod(int nargs, char **args);
int do_loglevel(int nargs, char **args);
int do_load_persist_props(int nargs, char **args);
int do_wait(int nargs, char **args);
#define __MAKE_KEYWORD_ENUM__//定义一个宏
/*
* 定义KEYWORD宏,这里KEYWORD宏中有四个参数,其各自的含义如下:
* symbol表示keyword的名称(即init.rc中的关键字);
* flags表示keyword的类型,包括SECTION、COMMAND和OPTION三种类型,其定义在init_parser.c中;
* nargs表示参数的个数,即:该keyword需要几个参数
* func表示该keyword所对应的处理函数。
*
* KEYWORD宏虽然有四个参数,但是这里只用到了symbol,其中K_##symbol中的##表示连接的意思,
* 即最后的得到的值为K_symbol。
*/
#define KEYWORD(symbol, flags, nargs, func) K_##symbol,
enum {
K_UNKNOWN,
#endif
KEYWORD(capability, OPTION, 0, 0)//根据上面KEYWORD的宏定义,这一行就变成了K_capability,
KEYWORD(chdir, COMMAND, 1, do_chdir)//key_chdir,后面的依次类推
KEYWORD(chroot, COMMAND, 1, do_chroot)
KEYWORD(class, OPTION, 0, 0)
KEYWORD(class_start, COMMAND, 1, do_class_start)
KEYWORD(class_stop, COMMAND, 1, do_class_stop)
KEYWORD(class_reset, COMMAND, 1, do_class_reset)
KEYWORD(console, OPTION, 0, 0)
KEYWORD(critical, OPTION, 0, 0)
KEYWORD(disabled, OPTION, 0, 0)
KEYWORD(domainname, COMMAND, 1, do_domainname)
KEYWORD(exec, COMMAND, 1, do_exec)
KEYWORD(export, COMMAND, 2, do_export)
KEYWORD(group, OPTION, 0, 0)
KEYWORD(hostname, COMMAND, 1, do_hostname)
KEYWORD(ifup, COMMAND, 1, do_ifup)
KEYWORD(insmod, COMMAND, 1, do_insmod)
KEYWORD(import, SECTION, 1, 0)
KEYWORD(keycodes, OPTION, 0, 0)
KEYWORD(mkdir, COMMAND, 1, do_mkdir)
KEYWORD(mount_all, COMMAND, 1, do_mount_all)
KEYWORD(mount, COMMAND, 3, do_mount)
KEYWORD(on, SECTION, 0, 0)
KEYWORD(oneshot, OPTION, 0, 0)
KEYWORD(onrestart, OPTION, 0, 0)
KEYWORD(powerctl, COMMAND, 1, do_powerctl)
KEYWORD(restart, COMMAND, 1, do_restart)
KEYWORD(restorecon, COMMAND, 1, do_restorecon)
KEYWORD(rm, COMMAND, 1, do_rm)
KEYWORD(rmdir, COMMAND, 1, do_rmdir)
KEYWORD(seclabel, OPTION, 0, 0)
KEYWORD(service, SECTION, 0, 0)
KEYWORD(setcon, COMMAND, 1, do_setcon)
KEYWORD(setenforce, COMMAND, 1, do_setenforce)
KEYWORD(setenv, OPTION, 2, 0)
KEYWORD(setkey, COMMAND, 0, do_setkey)
KEYWORD(setprop, COMMAND, 2, do_setprop)
KEYWORD(setrlimit, COMMAND, 3, do_setrlimit)
KEYWORD(setsebool, COMMAND, 2, do_setsebool)
KEYWORD(socket, OPTION, 0, 0)
KEYWORD(start, COMMAND, 1, do_start)
KEYWORD(stop, COMMAND, 1, do_stop)
KEYWORD(swapon_all, COMMAND, 1, do_swapon_all)
KEYWORD(trigger, COMMAND, 1, do_trigger)
KEYWORD(symlink, COMMAND, 1, do_symlink)
KEYWORD(sysclktz, COMMAND, 1, do_sysclktz)
KEYWORD(user, OPTION, 0, 0)
KEYWORD(wait, COMMAND, 1, do_wait)
KEYWORD(write, COMMAND, 2, do_write)
KEYWORD(copy, COMMAND, 2, do_copy)
KEYWORD(chown, COMMAND, 2, do_chown)
KEYWORD(chmod, COMMAND, 2, do_chmod)
KEYWORD(loglevel, COMMAND, 1, do_loglevel)
KEYWORD(load_persist_props, COMMAND, 0, do_load_persist_props)
KEYWORD(ioprio, OPTION, 0, 0)
#ifdef __MAKE_KEYWORD_ENUM__
KEYWORD_COUNT,
};
#undef __MAKE_KEYWORD_ENUM__
#undef KEYWORD//取消KEYWORD宏的定义
#endif
看一下keyword在init_parse.c中是如何被使用的:
[cpp] view
plaincopyprint?
#include "keywords.h"
#define KEYWORD(symbol, flags, nargs, func) \
[ K_##symbol ] = { #symbol, func, nargs + 1, flags, },
struct {
const char *name;//关键字的名称
int (*func)(int nargs, char **args);//对应关键字的处理函数
unsigned char nargs;//参数个数,每个关键字的参数个数是固定的
unsigned char flags;//关键字属性,包括:SECTION、OPTION和COMMAND,其中COMMAND有对应的处理函数,见keyword的定义。
} keyword_info[KEYWORD_COUNT] = {
[ K_UNKNOWN ] = { "unknown", 0, 0, 0 },
#include "keywords.h"
};
#undef KEYWORD
#define kw_is(kw, type) (keyword_info[kw].flags & (type))
#define kw_name(kw) (keyword_info[kw].name)
#define kw_func(kw) (keyword_info[kw].func)
#define kw_nargs(kw) (keyword_info[kw].nargs)
从上面的代码我们看到一个很有意思的地方,keyword.h头文件被包含引用了两次。
第一次包含keywords.h时,它声明了一些诸如do_class_start的函数,另外还定义了一个枚举,枚举值为K_class、K_mkdir等关键字。
第二次包含keywords.h后,得到了keyword_info结构体数组,这个keyword_info结构体数组以前定义的枚举值为索引,存储对应的关键字信息。
flags的取值也在init_parse.c中定义:
[cpp] view
plaincopyprint?
#define SECTION 0x01
#define COMMAND 0x02
#define OPTION 0x04
在了解了keyword后,下面我们继续来分析rc脚本的解析,让我们回到之前的代码,继续分析。
[cpp] view
plaincopyprint?
case T_NEWLINE:
state.line++;//一行读取完成后,行号加1
if (nargs) {//如果刚才解析的一行为语法行(非注释等),则nargs的值不为0,需要对这一行进行语法解析
int kw = lookup_keyword(args[0]);//init.rc中每一个语法行均是以一个keyword开头的,因此args[0]即表示这一行的keyword
if (kw_is(kw, SECTION)) {
state.parse_line(&state, 0, 0);
parse_new_section(&state, kw, nargs, args);
} else {
state.parse_line(&state, nargs, args);
}
nargs = 0;//复位
}
break;
解析section的函数为parse_new_section,其实现为:
[cpp] view
plaincopyprint?
void parse_new_section(struct parse_state *state, int kw,
int nargs, char **args)
{
printf("[ %s %s ]\n", args[0],
nargs > 1 ? args[1] : "");
switch(kw) {
case K_service://解析Service
state->context = parse_service(state, nargs, args);//当service_list中不存在同名service时,执行新加入service_list中的service
if (state->context) {//service为新增加的service时,即:<span style="font-family: Arial, Helvetica, sans-serif;">service_list中不存在同名service</span>
state->parse_line = parse_line_service;//制定解析service行的函数为<span style="font-family: Arial, Helvetica, sans-serif;">parse_line_service</span>
return;
}
break;
case K_on://解析section
state->context = parse_action(state, nargs, args);
if (state->context) {
state->parse_line = parse_line_action;
return;
}
break;
case K_import://解析import
parse_import(state, nargs, args);
break;
}
state->parse_line = parse_line_no_op;
}
先看一下service的解析:
[cpp] view
plaincopyprint?
static void *parse_service(struct parse_state *state, int nargs, char **args)
{
struct service *svc;//保持Service相关信息
if (nargs < 3) {
parse_error(state, "services must have a name and a program\n");
return 0;
}
if (!valid_name(args[1])) {
parse_error(state, "invalid service name '%s'\n", args[1]);
return 0;
}
//service_list中是否已存在同名service<span style="white-space:pre"> </span>
svc = service_find_by_name(args[1]);
if (svc) {//<span style="font-family: Arial, Helvetica, sans-serif;">如果已存在同名service则直接返回,不再做其他操作</span>
parse_error(state, "ignored duplicate definition of service '%s'\n", args[1]);
return 0;
}
nargs -= 2;
svc = calloc(1, sizeof(*svc) + sizeof(char*) * nargs);
if (!svc) {
parse_error(state, "out of memory\n");
return 0;
}
svc->name = args[1];
svc->classname = "default";//设置classname为“default”
memcpy(svc->args, args + 2, sizeof(char*) * nargs);
svc->args[nargs] = 0;
svc->nargs = nargs;
svc->onrestart.name = "onrestart";
list_init(&svc->onrestart.commands);
list_add_tail(&service_list, &svc->slist);//将service添加到全局链表service_list中
return svc;
}
init中使用了一个叫做service的结构体来保存与service相关的信息。
@system/core/init/init.h
[cpp] view
plaincopyprint?
struct service {
/* list of all services */
struct listnode slist;//双向链表
const char *name;//service的名字
const char *classname;//service所属class的名字,默认是“default”
unsigned flags;//service的属性
pid_t pid;//进程号
time_t time_started; /* time of last start 上一次启动的时间*/
time_t time_crashed; /* first crash within inspection window 第一次死亡的时间*/
int nr_crashed; /* number of times crashed within window 死亡次数*/
uid_t uid;
gid_t gid;
gid_t supp_gids[NR_SVC_SUPP_GIDS];
size_t nr_supp_gids;
char *seclabel;
struct socketinfo *sockets;//有些service需要使用socket,socketinfo用来描述socket相关信息
struct svcenvinfo *envvars;//service一般运行在一个单独的进程中,envvars用来描述创建这个进程时所需的环境变量信息
//关键字onrestart标示一个OPTION,可是onrestart后面一般跟着COMMAND,下面这个action结构体可用来存储command信息
struct action onrestart; /* Actions to execute on restart. */
/* keycodes for triggering this service via /dev/keychord */
int *keycodes;
int nkeycodes;
int keychord_id;
int ioprio_class;
int ioprio_pri;
int nargs;//参数个数
/* "MUST BE AT THE END OF THE STRUCT" */
char *args[1];//用于存储参数
}; /* ^-------'args' MUST be at the end of this struct! */
从parse_service函数可以看出,它的作用就是讲service添加到service_list列表中,并制定解析函数为parse_line_service,也就是说具体的service的解析靠的是parse_line_service方法。
[cpp] view
plaincopyprint?
static void parse_line_service(struct parse_state *state, int nargs, char **args)
{
struct service *svc = state->context;
struct command *cmd;
int i, kw, kw_nargs;
if (nargs == 0) {
return;
}
svc->ioprio_class = IoSchedClass_NONE;
kw = lookup_keyword(args[0]);
switch (kw) {
case K_capability:
break;
case K_class:
if (nargs != 2) {
parse_error(state, "class option requires a classname\n");
} else {
svc->classname = args[1];
}
break;
case K_console:
svc->flags |= SVC_CONSOLE;
break;
case K_disabled:
svc->flags |= SVC_DISABLED;
svc->flags |= SVC_RC_DISABLED;
break;
case K_ioprio:
if (nargs != 3) {
parse_error(state, "ioprio optin usage: ioprio <rt|be|idle> <ioprio 0-7>\n");
} else {
svc->ioprio_pri = strtoul(args[2], 0, 8);
if (svc->ioprio_pri < 0 || svc->ioprio_pri > 7) {
parse_error(state, "priority value must be range 0 - 7\n");
break;
}
if (!strcmp(args[1], "rt")) {
svc->ioprio_class = IoSchedClass_RT;
} else if (!strcmp(args[1], "be")) {
svc->ioprio_class = IoSchedClass_BE;
} else if (!strcmp(args[1], "idle")) {
svc->ioprio_class = IoSchedClass_IDLE;
} else {
parse_error(state, "ioprio option usage: ioprio <rt|be|idle> <0-7>\n");
}
}
break;
case K_group:
if (nargs < 2) {
parse_error(state, "group option requires a group id\n");
} else if (nargs > NR_SVC_SUPP_GIDS + 2) {
parse_error(state, "group option accepts at most %d supp. groups\n",
NR_SVC_SUPP_GIDS);
} else {
int n;
svc->gid = decode_uid(args[1]);
for (n = 2; n < nargs; n++) {
svc->supp_gids[n-2] = decode_uid(args
);
}
svc->nr_supp_gids = n - 2;
}
break;
case K_keycodes:
if (nargs < 2) {
parse_error(state, "keycodes option requires atleast one keycode\n");
} else {
svc->keycodes = malloc((nargs - 1) * sizeof(svc->keycodes[0]));
if (!svc->keycodes) {
parse_error(state, "could not allocate keycodes\n");
} else {
svc->nkeycodes = nargs - 1;
for (i = 1; i < nargs; i++) {
svc->keycodes[i - 1] = atoi(args[i]);
}
}
}
break;
case K_oneshot:
svc->flags |= SVC_ONESHOT;
break;
case K_onrestart:
nargs--;
args++;
kw = lookup_keyword(args[0]);
if (!kw_is(kw, COMMAND)) {
parse_error(state, "invalid command '%s'\n", args[0]);
break;
}
kw_nargs = kw_nargs(kw);
if (nargs < kw_nargs) {
parse_error(state, "%s requires %d %s\n", args[0], kw_nargs - 1,
kw_nargs > 2 ? "arguments" : "argument");
break;
}
cmd = malloc(sizeof(*cmd) + sizeof(char*) * nargs);
cmd->func = kw_func(kw);
cmd->nargs = nargs;
memcpy(cmd->args, args, sizeof(char*) * nargs);
list_add_tail(&svc->onrestart.commands, &cmd->clist);
break;
case K_critical:
svc->flags |= SVC_CRITICAL;
break;
case K_setenv: { /* name value */
struct svcenvinfo *ei;
if (nargs < 2) {
parse_error(state, "setenv option requires name and value arguments\n");
break;
}
ei = calloc(1, sizeof(*ei));
if (!ei) {
parse_error(state, "out of memory\n");
break;
}
ei->name = args[1];
ei->value = args[2];
ei->next = svc->envvars;
svc->envvars = ei;
break;
}
case K_socket: {/* name type perm [ uid gid ] */
struct socketinfo *si;
if (nargs < 4) {
parse_error(state, "socket option requires name, type, perm arguments\n");
break;
}
if (strcmp(args[2],"dgram") && strcmp(args[2],"stream")
&& strcmp(args[2],"seqpacket")) {
parse_error(state, "socket type must be 'dgram', 'stream' or 'seqpacket'\n");
break;
}
si = calloc(1, sizeof(*si));
if (!si) {
parse_error(state, "out of memory\n");
break;
}
si->name = args[1];
si->type = args[2];
si->perm = strtoul(args[3], 0, 8);
if (nargs > 4)
si->uid = decode_uid(args[4]);
if (nargs > 5)
si->gid = decode_uid(args[5]);
si->next = svc->sockets;
svc->sockets = si;
break;
}
case K_user:
if (nargs != 2) {
parse_error(state, "user option requires a user id\n");
} else {
svc->uid = decode_uid(args[1]);
}
break;
case K_seclabel:
if (nargs != 2) {
parse_error(state, "seclabel option requires a label string\n");
} else {
svc->seclabel = args[1];
}
break;
default:
parse_error(state, "invalid option '%s'\n", args[0]);
}
}
可以看出parse_line_service中会根据keyword找的对应的keyword的处理函数,具体进程处理。
section的处理与service类似,通过分析init.rc的解析过程,我们知道,所谓的解析就是将rc脚本中的内容通过解析,填充到service_list和action_list中去。那他们是在哪里进行调用的呢,让我们回忆一下init进程中main函数的实现。
[cpp] view
plaincopyprint?
INFO("reading config file\n");
init_parse_config_file("/init.rc");//解析init.rc配置文件
action_for_each_trigger("early-init", action_add_queue_tail);
queue_builtin_action(wait_for_coldboot_done_action, "wait_for_coldboot_done");
queue_builtin_action(mix_hwrng_into_linux_rng_action, "mix_hwrng_into_linux_rng");
queue_builtin_action(keychord_init_action, "keychord_init");
queue_builtin_action(console_init_action, "console_init");
/* execute all the boot actions to get us started */
action_for_each_trigger("init", action_add_queue_tail);
/* skip mounting filesystems in charger mode */
if (!is_charger) {
action_for_each_trigger("early-fs", action_add_queue_tail);
action_for_each_trigger("fs", action_add_queue_tail);
action_for_each_trigger("post-fs", action_add_queue_tail);
action_for_each_trigger("post-fs-data", action_add_queue_tail);
}
OK,到这里init.rc脚本的解析就完了。

相关文章推荐
- tomcat连接池和dbutils使用
- 《信息传奇》第一集
- 开发工具之谈
- python 笔记2--函数
- PDA无法连接eclipse调试
- python 笔记2--函数
- 关于Java线程意外退出自动重启..
- oneThink 数据库连接失败,总提示密码不对的解决办法
- Objective-C 【NSString-字符串比较&前后缀检查及搜索】
- ./configure: error: the HTTP rewrite module requires the PCRE library解决
- 黑马程序员——C语言之结构体
- IDEA 配置Tomcat7
- Arrays.asList(T... a)源码分析
- Android 通知使用小结
- 彻底的放弃.net
- ANGULARJS 动态编译添加到dom中
- C#PictureBox释放图片内存问题
- 1.6-常见的502问题解决
- POJ1528——因子和
- 多线程(java)