基于MPU6050的加速度求角度
2015-08-06 11:09
337 查看
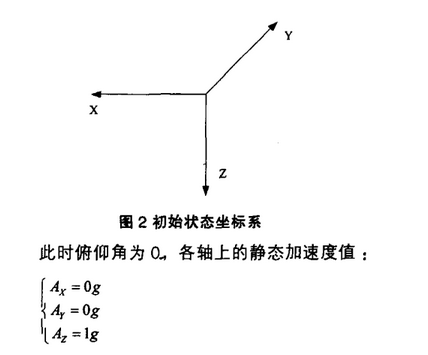
初始状态是,加速度计读数是A_X =0; A_Y=0; A_Z=1g;如下图:
然后旋转一定角度后事这样:
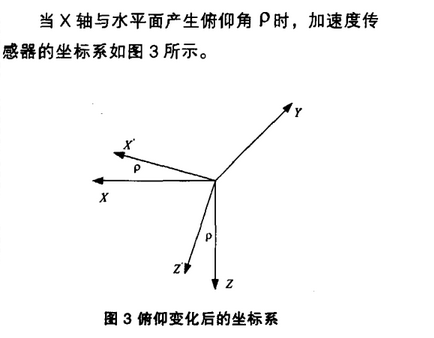
旋转后仍要保证竖直方向是1g的加速度,所以有将X轴和Z轴的加速度值矢量叠加后为1g即可用反正切求出P的大小来了
如图:
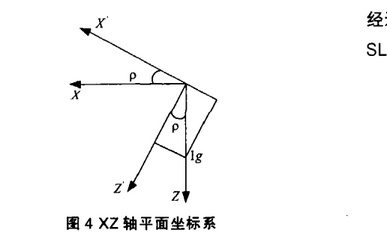
即可得
Angle = atan2(Acc_x,Acc_z);(注意:这里得出来的角度是弧度)
然后旋转一定角度后事这样:
旋转后仍要保证竖直方向是1g的加速度,所以有将X轴和Z轴的加速度值矢量叠加后为1g即可用反正切求出P的大小来了
如图:
即可得
Angle = atan2(Acc_x,Acc_z);(注意:这里得出来的角度是弧度)

相关文章推荐
- 南邮 OJ 1735 互质分数
- poj 1426 Find The Multiple
- 安卓实习第十七天
- 如何成为一个超级软件开发者
- 使用Owin中间件搭建OAuth2.0认证授权服务器
- 招商银行设计缺陷可以查询其他用户信用卡消费&还款记录(附测试代码)
- 由二叉树前序和中序遍历生成二叉树
- C++语言出现的bug
- 2.9-curl命令
- SpringMVC原理
- 设置与菜单项关联的Activity学习笔记
- memcached真实项目中的应用
- HDU 1561 The more, The Better(树形DP)
- C(5)
- PHP中获取当前页面的完整URL
- jquery换肤
- 使用命令导入导出mysql
- java异常
- 原生js绑定和解除事件
- iOS 刷新window根视图