ARMA建模以及卡尔曼滤波
2015-08-04 22:07
447 查看
惯性导航时常用到ARMA建模和卡尔曼滤波,最近两天准备科普一下。
X n =−(a 1 X n−1 +a 2 X n−2 +....+a p X n−p )+ξ n +b 1 ξ n−1 +b 2 ξ n−2 +....+b q ξ n−q
X n =−a 1 X n−1 +ξ n
在MATLAB中可以使用ar()函数,读者可以help一下即可。
AR(1)模型描述误差信号后,可以将其改为状态空间模型和输入输出模型:
X k =ΦX n−1 +W k−1
Z k =HX k +V k
其中W k−1 和V k 为零均值白噪声序列
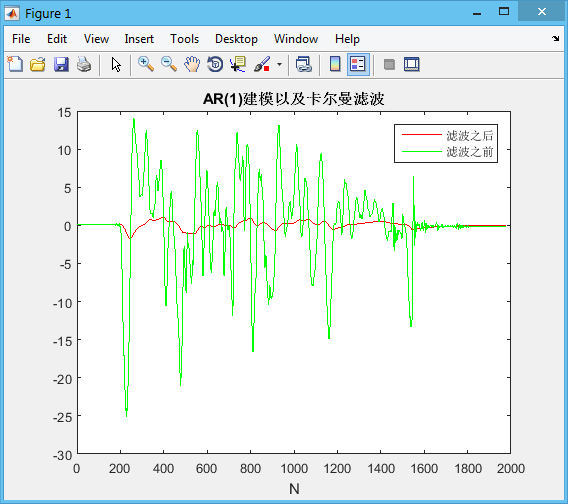
进行卡尔曼滤波,我们需要知道系统模型噪声方差阵,量测噪声方差阵,以及初始值,看文献得,经过AR(1)模型拟合后的漂移信号的协方差为系统噪声协方差阵,实测数据作为观测量,其协方差为测量噪声的正定方差阵。另外,原始测量值均方根值的1/10作为初始误差方差阵。以后即可进行卡尔曼滤波,有关卡尔曼滤波公式不再赘述。
所得结果如下所示:
X n =−(a 1 X n−1 +a 2 X n−2 +....+a p X n−p )+ξ n +b 1 ξ n−1 +b 2 ξ n−2 +....+b q ξ n−q
AR(1)
自回归模型AR(P),P=1 ,建立漂移一阶归模型AR(1)模型:X n =−a 1 X n−1 +ξ n
在MATLAB中可以使用ar()函数,读者可以help一下即可。
AR(1)模型描述误差信号后,可以将其改为状态空间模型和输入输出模型:
X k =ΦX n−1 +W k−1
Z k =HX k +V k
其中W k−1 和V k 为零均值白噪声序列
进行卡尔曼滤波,我们需要知道系统模型噪声方差阵,量测噪声方差阵,以及初始值,看文献得,经过AR(1)模型拟合后的漂移信号的协方差为系统噪声协方差阵,实测数据作为观测量,其协方差为测量噪声的正定方差阵。另外,原始测量值均方根值的1/10作为初始误差方差阵。以后即可进行卡尔曼滤波,有关卡尔曼滤波公式不再赘述。
所得结果如下所示:
AR(2)
ARMA(1,1)
ARMA(2,1)

相关文章推荐
- 卡尔曼滤波在单片机上的使用
- eviews做arma预测
- 浅谈卡尔曼滤波器
- 一个应用实例详解卡尔曼滤波及其算法实现
- 卡尔曼滤波及其MATLAB程序
- 卡尔曼滤波(Kalman Filter) 的进一步讨论
- 卡尔曼滤波(Kalman Filter)
- 卡尔曼滤波_3(EKF)
- 卡尔曼滤波_2(图解)
- 卡尔曼滤波从应用到推导 -- kalman学习笔记
- 卡尔曼滤波的应用领域与适用范围
- 关于卡尔曼滤波本质解释和公式推到
- 图像处理之_卡尔曼滤波
- 卡尔曼滤波原理二:扩展卡尔曼
- 卡尔曼滤波(一)
- 卡尔曼滤波的原理说明
- 卡尔曼滤波(Kalman Filter)
- 卡尔曼滤波(Kalman Filter) 的进一步讨论
- 卡尔曼滤波原理说明
- 卡尔曼滤波C代码分析