OpenCV,详解基本图像容器Mat类与IplImage结构体(三)
2015-06-04 10:54
676 查看
原网络作者:
http://www.cnblogs.com/libing64/archive/2011/09/17/2878765.html
一,来自中文网的详尽描述(当时版本为2.3.2)
从真实世界中获取数字图像有很多方法,比如数码相机、扫描仪、CT或者磁共振成像。无论哪种方法,我们(人类)看到的是图像,而让数字设备来“看“的时候,则是在记录图像中的每一个点的数值。
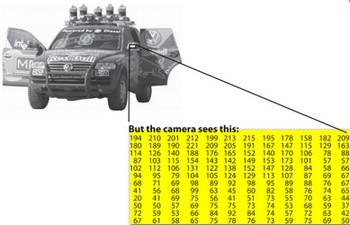
比如上面的图像,在标出的镜子区域中你见到的只是一个矩阵,该矩阵包含了所有像素点的强度值。如何获取并存储这些像素值由我们的需求而定,最终在计算机世界里所有图像都可以简化为数值矩以及矩阵信息。作为一个计算机视觉库, OpenCV 其主要目的就是通过处理和操作这些信息,来获取更高级的信息。因此,OpenCV如何存储并操作图像是你首先要学习的。
在2001年刚刚出现的时候,OpenCV基于 C 语言接口而建。为了在内存(memory)中存放图像,当时采用名为 IplImage 的C语言结构体,时至今日这仍出现在大多数的旧版教程和教学材料。但这种方法必须接受C语言所有的不足,这其中最大的不足要数手动内存管理,其依据是用户要为开辟和销毁内存负责。虽然对于小型的程序来说手动管理内存不是问题,但一旦代码开始变得越来越庞大,你需要越来越多地纠缠于这个问题,而不是着力解决你的开发目标。
幸运的是,C++出现了,并且带来类的概念,这给用户带来另外一个选择:自动的内存管理(不严谨地说)。这是一个好消息,如果C++完全兼容C的话,这个变化不会带来兼容性问题。为此,OpenCV在2.0版本中引入了一个新的C++接口,利用自动内存管理给出了解决问题的新方法。使用这个方法,你不需要纠结在管理内存上,而且你的代码会变得简洁(少写多得)。但C++接口唯一的不足是当前许多嵌入式开发系统只支持C语言。所以,当目标不是这种开发平台时,没有必要使用 旧 方法(除非你是自找麻烦的受虐狂码农)。
关于 Mat ,首先要知道的是你不必再手动地
(1)为其开辟空间
(2)在不需要时立即将空间释放。
但手动地做还是可以的:大多数OpenCV函数仍会手动地为输出数据开辟空间。当传递一个已经存在的 Mat 对象时,开辟好的矩阵空间会被重用。也就是说,我们每次都使用大小正好的内存来完成任务。
基本上讲 Mat 是一个类,由两个数据部分组成:
矩阵头(包含矩阵尺寸,存储方法,存储地址等信息)和
一个指向存储所有像素值的矩阵(根据所选存储方法的不同矩阵可以是不同的维数)的指针。矩阵头的尺寸是常数值,但矩阵本身的尺寸会依图像的不同而不同,通常比矩阵头的尺寸大数个数量级。因此,当在程序中传递图像并创建拷贝时,大的开销是由矩阵造成的,而不是信息头。OpenCV是一个图像处理库,囊括了大量的图像处理函数,为了解决问题通常要使用库中的多个函数,因此在函数中传递图像是家常便饭。同时不要忘了我们正在讨论的是计算量很大的图像处理算法,因此,除非万不得已,我们不应该拷贝 大 的图像,因为这会降低程序速度。
为了搞定这个问题,OpenCV使用引用计数机制。其思路是让每个 Mat 对象有自己的信息头,但共享同一个矩阵。这通过让矩阵指针指向同一地址而实现。而拷贝构造函数则 只拷贝信息头和矩阵指针 ,而不拷贝矩阵。
以上代码中的所有Mat对象最终都指向同一个也是唯一一个数据矩阵。虽然它们的信息头不同,但通过任何一个对象所做的改变也会影响其它对象。实际上,不同的对象只是访问相同数据的不同途径而已。这里还要提及一个比较棒的功能:你可以创建只引用部分数据的信息头。比如想要创建一个感兴趣区域( ROI ),你只需要创建包含边界信息的信息头:
现在你也许会问,如果矩阵属于多个 Mat 对象,那么当不再需要它时谁来负责清理?简单的回答是:最后一个使用它的对象。通过引用计数机制来实现。无论什么时候有人拷贝了一个 Mat 对象的信息头,都会增加矩阵的引用次数;反之当一个头被释放之后,这个计数被减一;当计数值为零,矩阵会被清理。但某些时候你仍会想拷贝矩阵本身(不只是信息头和矩阵指针),这时可以使用函数 clone() 或者 copyTo() 。
现在改变 F 或者 G 就不会影响 Mat 信息头所指向的矩阵。总结一下,你需要记住的是
OpenCV函数中输出图像的内存分配是自动完成的(如果不特别指定的话)。
使用OpenCV的C++接口时不需要考虑内存释放问题。
赋值运算符和拷贝构造函数( ctor )只拷贝信息头。
使用函数 clone() 或者 copyTo() 来拷贝一副图像的矩阵。
这里讲述如何存储像素值。需要指定颜色空间和数据类型。颜色空间是指对一个给定的颜色,如何组合颜色元素以对其编码。最简单的颜色空间要属灰度级空间,只处理黑色和白色,对它们进行组合可以产生不同程度的灰色。
对于 彩色 方式则有更多种类的颜色空间,但不论哪种方式都是把颜色分成三个或者四个基元素,通过组合基元素可以产生所有的颜色。RGB颜色空间是最常用的一种颜色空间,这归功于它也是人眼内部构成颜色的方式。它的基色是红色、绿色和蓝色,有时为了表示透明颜色也会加入第四个元素 alpha (A)。
有很多的颜色系统,各有自身优势:
RGB是最常见的,这是因为人眼采用相似的工作机制,它也被显示设备所采用。
HSV和HLS把颜色分解成色调、饱和度和亮度/明度。这是描述颜色更自然的方式,比如可以通过抛弃最后一个元素,使算法对输入图像的光照条件不敏感。
YCrCb在JPEG图像格式中广泛使用。
CIE L*a*b*是一种在感知上均匀的颜色空间,它适合用来度量两个颜色之间的 距离 。
每个组成元素都有其自己的定义域,取决于其数据类型。如何存储一个元素决定了我们在其定义域上能够控制的精度。最小的数据类型是 char ,占一个字节或者8位,可以是有符号型(0到255之间)或无符号型(-127到+127之间)。尽管使用三个 char 型元素已经可以表示1600万种可能的颜色(使用RGB颜色空间),但若使用float(4字节,32位)或double(8字节,64位)则能给出更加精细的颜色分辨能力。但同时也要切记增加元素的尺寸也会增加了图像所占的内存空间。
教程 读取、修改、保存图像 已经讲解了如何使用函数 imwrite() 将一个矩阵写入图像文件中。但是为了debug,更加方便的方式是看实际值。为此,你可以通过Mat 的运算符
<< 来实现,但要记住这只对二维矩阵有效。
Mat 不但是一个很赞的图像容器类,它同时也是一个通用的矩阵类,所以可以用来创建和操作多维矩阵。创建一个Mat对象有多种方法:
Mat() 构造函数
对于二维多通道图像,首先要定义其尺寸,即行数和列数。
然后,需要指定存储元素的数据类型以及每个矩阵点的通道数。为此,依据下面的规则有多种定义
比如 CV_8UC3 表示使用8位的 unsigned char 型,每个像素由三个元素组成三通道。预先定义的通道数可以多达四个。 Scalar 是个short型vector。指定这个能够使用指定的定制化值来初始化矩阵。当然,如果你需要更多通道数,你可以使用大写的宏并把通道数放在小括号中,如下所示
在 C\C++ 中通过构造函数进行初始化
上面的例子演示了如何创建一个超过两维的矩阵:指定维数,然后传递一个指向一个数组的指针,这个数组包含每个维度的尺寸;其余的相同
为已存在IplImage指针创建信息头:
Create() function: 函数
这个创建方法不能为矩阵设初值,它只是在改变尺寸时重新为矩阵数据开辟内存。
MATLAB形式的初始化方式: zeros(), ones(),
:eyes() 。使用以下方式指定尺寸和数据类型:
对于小矩阵你可以用逗号分隔的初始化函数:

使用 clone() 或者 copyTo() 为一个存在的 Mat 对象创建一个新的信息头。
Note
调用函数 randu() 来对一个矩阵使用随机数填充,需要指定随机数的上界和下界:
从上面的例子中可以看到默认格式,除此之外,OpenCV还支持以下的输出习惯
默认方式
Python
以逗号分隔的数值 (CSV)
Numpy

C语言
OpenCV支持使用运算符<<来打印其它常用OpenCV数据结构。
2维点

3维点

基于cv::Mat的std::vector

std::vector点

[cpp] view
plaincopyprint?
<span style="font-size:12px;">/* For description look into the help() function. */
#include "opencv2/core/core.hpp"
#include <iostream>
using namespace std;
using namespace cv;
static void help()
{
cout
<< "\n--------------------------------------------------------------------------" << endl
<< "This program shows how to create matrices(cv::Mat) in OpenCV and its serial"
<< " out capabilities" << endl
<< "That is, cv::Mat M(...); M.create and cout << M. " << endl
<< "Shows how output can be formated to OpenCV, python, numpy, csv and C styles." << endl
<< "Usage:" << endl
<< "./cvout_sample" << endl
<< "--------------------------------------------------------------------------" << endl
<< endl;
}
int main(int,char**)
{
help();
cout<<" create by using the constructor"<<endl;
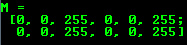
Mat M(2,2, CV_8UC3, Scalar(0,0,255));//3通道的2x2矩阵
cout << "M = " << endl << " " << M << endl << endl;
cout<<" create by using the create function()"<<endl;
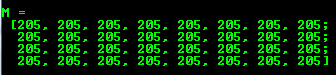
M.create(4,4, CV_8UC(2));//2通道的4x4矩阵
cout << "M = "<< endl << " " << M << endl << endl;
cout<<"create multidimensional matrices"<<endl;
int sz[3] = {2,2,2};
Mat L(3,sz, CV_8UC(1), Scalar::all(0));
// Cannot print via operator <<//三维矩阵不能再用流输出
cout<<"Create using MATLAB style eye, ones or zero matrix"<<endl;
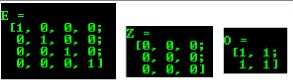
Mat E = Mat::eye(4, 4, CV_64F);
cout << "E = " << endl << " " << E << endl << endl;
Mat O = Mat::ones(2, 2, CV_32F);
cout << "O = " << endl << " " << O << endl << endl;
Mat Z = Mat::zeros(3,3, CV_8UC1);
cout << "Z = " << endl << " " << Z << endl << endl;
// create a 3x3 double-precision identity matrix
Mat C = (Mat_<double>(3,3) << 0, -1, 0, -1, 5, -1, 0, -1, 0);
cout << "C = " << endl << " " << C << endl << endl;
Mat RowClone = C.row(1).clone();//将矩阵c的第一行赋值给RowClone矩阵
cout << "RowClone = " << endl << " " << RowClone << endl << endl;
// Fill a matrix with random values
Mat R = Mat(3, 2, CV_8UC3);
randu(R, Scalar::all(0), Scalar::all(255));
// Demonstrate the output formating options
cout << "R (default) = " << endl << R << endl << endl;
cout << "R (python) = " << endl << format(R,"python") << endl << endl;
cout << "R (numpy) = " << endl << format(R,"numpy" ) << endl << endl;
cout << "R (csv) = " << endl << format(R,"csv" ) << endl << endl;
cout << "R (c) = " << endl << format(R,"C" ) << endl << endl;
Point2f P(5, 1);//二维点,浮点型
cout << "Point (2D) = " << P << endl << endl;
Point3f P3f(2, 6, 7);//三维点,浮点型
cout << "Point (3D) = " << P3f << endl << endl;
vector<float> v;//创建一个vector<float>对象,类型为浮点型的v
v.push_back( (float)CV_PI);
v.push_back(2);
v.push_back(3.01f);
cout << "Vector of floats via Mat = " << Mat(v) << endl << endl;
vector<Point2f> vPoints(20);//创建20个 vector<Point2f>数组对象,类型为二维点,浮点型
for (size_t i = 0; i < vPoints.size(); ++i)
vPoints[i] = Point2f((float)(i * 5), (float)(i % 7));
cout << "A vector of 2D Points = " << vPoints << endl << endl;
return 0;
}</span>




二,以下转载自网友的对[b]IplImage结构的解读[/b]
原文地址:
http://www.cnblogs.com/libing64/archive/2011/09/17/2878765.html
由于OpenCV主要针对的是计算机视觉方面的处理,因此在函数库中,最重要的结构体是IplImage结构。IplImage结构来源于Intel的另外一个函数库Intel Image Processing Library (IPL),该函数库主要是针对图像处理。IplImage结构具体定义如下:
typedef struct _IplImage
{
int nSize; /* IplImage大小 */
int ID; /* 版本 (=0)*/
int nChannels; /* 大多数OPENCV函数支持1,2,3 或 4 个通道 */
int alphaChannel; /* 被OpenCV忽略 */
int depth; /* 像素的位深度,主要有以下支持格式: IPL_DEPTH_8U, IPL_DEPTH_8S, IPL_DEPTH_16U,IPL_DEPTH_16S, IPL_DEPTH_32S,
IPL_DEPTH_32F 和IPL_DEPTH_64F */
char colorModel[4]; /* 被OpenCV忽略 */
char channelSeq[4]; /* 同上 */
int dataOrder; /* 0 - 交叉存取颜色通道, 1 - 分开的颜色通道.
只有cvCreateImage可以创建交叉存取图像 */
int origin; /*图像原点位置: 0表示顶-左结构,1表示底-左结构 */
int align; /* 图像行排列方式 (4 or 8),在 OpenCV 被忽略,使用 widthStep 代替 */
int width; /* 图像宽像素数 */
int height; /* 图像高像素数*/
struct _IplROI *roi; /* 图像感兴趣区域,当该值非空时,
只对该区域进行处理 */
struct _IplImage *maskROI; /* 在 OpenCV中必须为NULL */
void *imageId; /* 同上*/
struct _IplTileInfo *tileInfo; /*同上*/
int imageSize; /* 图像数据大小(在交叉存取格式下ImageSize=image->height*image->widthStep),单位字节*/
char *imageData; /* 指向排列的图像数据 */
int widthStep; /* 排列的图像行大小,以字节为单位 */
int BorderMode[4]; /* 边际结束模式, 在 OpenCV 被忽略*/
int BorderConst[4]; /* 同上 */
char *imageDataOrigin; /* 指针指向一个不同的图像数据结构(不是必须排列的),是为了纠正图像内存分配准备的 */
} IplImage;
IplImage结构体是整个OpenCV函数库的基础,在定义该结构变量时需要用到函数cvCreatImage,变量定义方法如下:
IplImage* src="/cvCreateImage"(cvSize(400,300), IPL_DEPTH_8U,3);
上句定义了一个IplImage指针变量src,图像的大小是400×300,图像颜色深度8位,3通道图像。
常用的五个函数(I/O)
1. 图像载入函数
函数cvLoadImage载入指定图像文件,并返回指向该文件的IplImage指针。函数支持bmp、jpg、 png、 tiff等格式的图像。其函数原型如下:
IplImage* cvLoadImage( const char* filename, int iscolor);
其中,filename 是待载入图像的名称,包括图像的扩展名;iscolor是一个辅助参数项,可选正数、零和负数三种值,正数表示作为三通道图像载入,零表示该图像作为单通道图像,负数表示载入图像的通道数由图像文件自身决定。
2. 窗口定义函数
函数cvNamedWindow定义一个窗口,用于显示图像。其函数原型如下:
int cvNamedWindow( const char* name, unsigned long flags );
其中,name是窗口名,flags是窗口属性指标值,可以选择CV_WINDOW_AUTOSIZE和0两种值。CV_WINDOW_AUTOSIZE表示窗口尺寸与图像原始尺寸相同,0表示以固定的窗口尺寸显示图像。
3. 图像显示函数
函数cvShowImage是在指定的窗口中显示图像,其函数原型如下:
void cvShowImage( const char* name, const CvArr* image );
其中,name是窗口名称,image是图像类型指针,一般是IplImage指针。
4. 图像保存函数
函数cvSaveImage以指定的文件名保存IplImage类型的指针变量,其函数原型如下:
int cvSaveImage( const char* filename, const CvArr* image );
其中,filename是图像保存路径和名称,image是IplImage指针变量。
5. 图像销毁函数
函数cvReleaseImage销毁已定义的IplImage指针变量,释放占用内存空间。其函数原型如下:
void cvReleaseImage( IplImage** image );
其中,image为已定义的IplImage指针。
http://www.cnblogs.com/libing64/archive/2011/09/17/2878765.html
一,来自中文网的详尽描述(当时版本为2.3.2)
目的
从真实世界中获取数字图像有很多方法,比如数码相机、扫描仪、CT或者磁共振成像。无论哪种方法,我们(人类)看到的是图像,而让数字设备来“看“的时候,则是在记录图像中的每一个点的数值。比如上面的图像,在标出的镜子区域中你见到的只是一个矩阵,该矩阵包含了所有像素点的强度值。如何获取并存储这些像素值由我们的需求而定,最终在计算机世界里所有图像都可以简化为数值矩以及矩阵信息。作为一个计算机视觉库, OpenCV 其主要目的就是通过处理和操作这些信息,来获取更高级的信息。因此,OpenCV如何存储并操作图像是你首先要学习的。
Mat
在2001年刚刚出现的时候,OpenCV基于 C 语言接口而建。为了在内存(memory)中存放图像,当时采用名为 IplImage 的C语言结构体,时至今日这仍出现在大多数的旧版教程和教学材料。但这种方法必须接受C语言所有的不足,这其中最大的不足要数手动内存管理,其依据是用户要为开辟和销毁内存负责。虽然对于小型的程序来说手动管理内存不是问题,但一旦代码开始变得越来越庞大,你需要越来越多地纠缠于这个问题,而不是着力解决你的开发目标。幸运的是,C++出现了,并且带来类的概念,这给用户带来另外一个选择:自动的内存管理(不严谨地说)。这是一个好消息,如果C++完全兼容C的话,这个变化不会带来兼容性问题。为此,OpenCV在2.0版本中引入了一个新的C++接口,利用自动内存管理给出了解决问题的新方法。使用这个方法,你不需要纠结在管理内存上,而且你的代码会变得简洁(少写多得)。但C++接口唯一的不足是当前许多嵌入式开发系统只支持C语言。所以,当目标不是这种开发平台时,没有必要使用 旧 方法(除非你是自找麻烦的受虐狂码农)。
关于 Mat ,首先要知道的是你不必再手动地
(1)为其开辟空间
(2)在不需要时立即将空间释放。
但手动地做还是可以的:大多数OpenCV函数仍会手动地为输出数据开辟空间。当传递一个已经存在的 Mat 对象时,开辟好的矩阵空间会被重用。也就是说,我们每次都使用大小正好的内存来完成任务。
基本上讲 Mat 是一个类,由两个数据部分组成:
矩阵头(包含矩阵尺寸,存储方法,存储地址等信息)和
一个指向存储所有像素值的矩阵(根据所选存储方法的不同矩阵可以是不同的维数)的指针。矩阵头的尺寸是常数值,但矩阵本身的尺寸会依图像的不同而不同,通常比矩阵头的尺寸大数个数量级。因此,当在程序中传递图像并创建拷贝时,大的开销是由矩阵造成的,而不是信息头。OpenCV是一个图像处理库,囊括了大量的图像处理函数,为了解决问题通常要使用库中的多个函数,因此在函数中传递图像是家常便饭。同时不要忘了我们正在讨论的是计算量很大的图像处理算法,因此,除非万不得已,我们不应该拷贝 大 的图像,因为这会降低程序速度。
为了搞定这个问题,OpenCV使用引用计数机制。其思路是让每个 Mat 对象有自己的信息头,但共享同一个矩阵。这通过让矩阵指针指向同一地址而实现。而拷贝构造函数则 只拷贝信息头和矩阵指针 ,而不拷贝矩阵。
1 2 3 4 5 6 | Mat A, C; // 只创建信息头部分 A = imread(argv[1], CV_LOAD_IMAGE_COLOR); // 这里为矩阵开辟内存 Mat B(A); // 使用拷贝构造函数 C = A; // 赋值运算符 |
1 2 | Mat D (A, Rect(10, 10, 100, 100) ); // using a rectangle Mat E = A(Range:all(), Range(1,3)); // using row and column boundaries |
1 2 | Mat F = A.clone(); Mat G; A.copyTo(G); |
OpenCV函数中输出图像的内存分配是自动完成的(如果不特别指定的话)。
使用OpenCV的C++接口时不需要考虑内存释放问题。
赋值运算符和拷贝构造函数( ctor )只拷贝信息头。
使用函数 clone() 或者 copyTo() 来拷贝一副图像的矩阵。
存储 方法
这里讲述如何存储像素值。需要指定颜色空间和数据类型。颜色空间是指对一个给定的颜色,如何组合颜色元素以对其编码。最简单的颜色空间要属灰度级空间,只处理黑色和白色,对它们进行组合可以产生不同程度的灰色。对于 彩色 方式则有更多种类的颜色空间,但不论哪种方式都是把颜色分成三个或者四个基元素,通过组合基元素可以产生所有的颜色。RGB颜色空间是最常用的一种颜色空间,这归功于它也是人眼内部构成颜色的方式。它的基色是红色、绿色和蓝色,有时为了表示透明颜色也会加入第四个元素 alpha (A)。
有很多的颜色系统,各有自身优势:
RGB是最常见的,这是因为人眼采用相似的工作机制,它也被显示设备所采用。
HSV和HLS把颜色分解成色调、饱和度和亮度/明度。这是描述颜色更自然的方式,比如可以通过抛弃最后一个元素,使算法对输入图像的光照条件不敏感。
YCrCb在JPEG图像格式中广泛使用。
CIE L*a*b*是一种在感知上均匀的颜色空间,它适合用来度量两个颜色之间的 距离 。
每个组成元素都有其自己的定义域,取决于其数据类型。如何存储一个元素决定了我们在其定义域上能够控制的精度。最小的数据类型是 char ,占一个字节或者8位,可以是有符号型(0到255之间)或无符号型(-127到+127之间)。尽管使用三个 char 型元素已经可以表示1600万种可能的颜色(使用RGB颜色空间),但若使用float(4字节,32位)或double(8字节,64位)则能给出更加精细的颜色分辨能力。但同时也要切记增加元素的尺寸也会增加了图像所占的内存空间。
显式地创建一个 Mat 对象
教程 读取、修改、保存图像 已经讲解了如何使用函数 imwrite() 将一个矩阵写入图像文件中。但是为了debug,更加方便的方式是看实际值。为此,你可以通过Mat 的运算符<< 来实现,但要记住这只对二维矩阵有效。
Mat 不但是一个很赞的图像容器类,它同时也是一个通用的矩阵类,所以可以用来创建和操作多维矩阵。创建一个Mat对象有多种方法:
Mat() 构造函数
Mat M(2,2, CV_8UC3, Scalar(0,0,255)); //Scalar(0,0,255)用于给每个通道赋值Scalar是一个整形向量 cout << "M = " << endl << " " << M << endl << endl;
对于二维多通道图像,首先要定义其尺寸,即行数和列数。
然后,需要指定存储元素的数据类型以及每个矩阵点的通道数。为此,依据下面的规则有多种定义
CV_[The number of bits per item][Signed or Unsigned][Type Prefix]C[The channel number]
比如 CV_8UC3 表示使用8位的 unsigned char 型,每个像素由三个元素组成三通道。预先定义的通道数可以多达四个。 Scalar 是个short型vector。指定这个能够使用指定的定制化值来初始化矩阵。当然,如果你需要更多通道数,你可以使用大写的宏并把通道数放在小括号中,如下所示
在 C\C++ 中通过构造函数进行初始化
int sz[3] = {2,2,2};
Mat L(3,sz, CV_8UC(1), Scalar::all(0));上面的例子演示了如何创建一个超过两维的矩阵:指定维数,然后传递一个指向一个数组的指针,这个数组包含每个维度的尺寸;其余的相同
为已存在IplImage指针创建信息头:
IplImage* img = cvLoadImage("greatwave.png", 1);
Mat mtx(img); // 转换 IplImage* -> MatCreate() function: 函数
M.create(4,4, CV_8UC(2));//两通道的另一种表达方式 cout << "M = "<< endl << " " << M << endl << endl;
这个创建方法不能为矩阵设初值,它只是在改变尺寸时重新为矩阵数据开辟内存。
MATLAB形式的初始化方式: zeros(), ones(),
:eyes() 。使用以下方式指定尺寸和数据类型:
Mat E = Mat::eye(4, 4, CV_64F); cout << "E = " << endl << " " << E << endl << endl; Mat O = Mat::ones(2, 2, CV_32F); cout << "O = " << endl << " " << O << endl << endl; Mat Z = Mat::zeros(3,3, CV_8UC1); cout << "Z = " << endl << " " << Z << endl << endl;
对于小矩阵你可以用逗号分隔的初始化函数:
Mat C = (Mat_<double>(3,3) << 0, -1, 0, -1, 5, -1, 0, -1, 0); cout << "C = " << endl << " " << C << endl << endl;
使用 clone() 或者 copyTo() 为一个存在的 Mat 对象创建一个新的信息头。
Mat RowClone = C.row(1).clone(); cout << "RowClone = " << endl << " " << RowClone << endl << endl;
格式化打印
Note调用函数 randu() 来对一个矩阵使用随机数填充,需要指定随机数的上界和下界:
Mat R = Mat(3, 2, CV_8UC3);//注意是三通道 randu(R, Scalar::all(0), Scalar::all(255));
从上面的例子中可以看到默认格式,除此之外,OpenCV还支持以下的输出习惯
默认方式
cout << "R (default) = " << endl << R << endl << endl;
Python
cout << "R (python) = " << endl << format(R,"python") << endl << endl;
以逗号分隔的数值 (CSV)
cout << "R (csv) = " << endl << format(R,"csv" ) << endl << endl;
Numpy
cout << "R (numpy) = " << endl << format(R,"numpy" ) << endl << endl;
C语言
cout << "R (c) = " << endl << format(R,"C" ) << endl << endl;
打印其它常用项目
OpenCV支持使用运算符<<来打印其它常用OpenCV数据结构。2维点
Point2f P(5, 1); cout << "Point (2D) = " << P << endl << endl;
3维点
Point3f P3f(2, 6, 7); cout << "Point (3D) = " << P3f << endl << endl;
基于cv::Mat的std::vector
vector<float> v; v.push_back( (float)CV_PI); v.push_back(2); v.push_back(3.01f); cout << "Vector of floats via Mat = " << Mat(v) << endl << endl;
std::vector点
vector<Point2f> vPoints(20); for (size_t E = 0; E < vPoints.size(); ++E) vPoints[E] = Point2f((float)(E * 5), (float)(E % 7)); cout << "A vector of 2D Points = " << vPoints << endl << endl;
实验
[cpp] viewplaincopyprint?
<span style="font-size:12px;">/* For description look into the help() function. */
#include "opencv2/core/core.hpp"
#include <iostream>
using namespace std;
using namespace cv;
static void help()
{
cout
<< "\n--------------------------------------------------------------------------" << endl
<< "This program shows how to create matrices(cv::Mat) in OpenCV and its serial"
<< " out capabilities" << endl
<< "That is, cv::Mat M(...); M.create and cout << M. " << endl
<< "Shows how output can be formated to OpenCV, python, numpy, csv and C styles." << endl
<< "Usage:" << endl
<< "./cvout_sample" << endl
<< "--------------------------------------------------------------------------" << endl
<< endl;
}
int main(int,char**)
{
help();
cout<<" create by using the constructor"<<endl;
Mat M(2,2, CV_8UC3, Scalar(0,0,255));//3通道的2x2矩阵
cout << "M = " << endl << " " << M << endl << endl;
cout<<" create by using the create function()"<<endl;
M.create(4,4, CV_8UC(2));//2通道的4x4矩阵
cout << "M = "<< endl << " " << M << endl << endl;
cout<<"create multidimensional matrices"<<endl;
int sz[3] = {2,2,2};
Mat L(3,sz, CV_8UC(1), Scalar::all(0));
// Cannot print via operator <<//三维矩阵不能再用流输出
cout<<"Create using MATLAB style eye, ones or zero matrix"<<endl;
Mat E = Mat::eye(4, 4, CV_64F);
cout << "E = " << endl << " " << E << endl << endl;
Mat O = Mat::ones(2, 2, CV_32F);
cout << "O = " << endl << " " << O << endl << endl;
Mat Z = Mat::zeros(3,3, CV_8UC1);
cout << "Z = " << endl << " " << Z << endl << endl;
// create a 3x3 double-precision identity matrix
Mat C = (Mat_<double>(3,3) << 0, -1, 0, -1, 5, -1, 0, -1, 0);
cout << "C = " << endl << " " << C << endl << endl;
Mat RowClone = C.row(1).clone();//将矩阵c的第一行赋值给RowClone矩阵
cout << "RowClone = " << endl << " " << RowClone << endl << endl;
// Fill a matrix with random values
Mat R = Mat(3, 2, CV_8UC3);
randu(R, Scalar::all(0), Scalar::all(255));
// Demonstrate the output formating options
cout << "R (default) = " << endl << R << endl << endl;
cout << "R (python) = " << endl << format(R,"python") << endl << endl;
cout << "R (numpy) = " << endl << format(R,"numpy" ) << endl << endl;
cout << "R (csv) = " << endl << format(R,"csv" ) << endl << endl;
cout << "R (c) = " << endl << format(R,"C" ) << endl << endl;
Point2f P(5, 1);//二维点,浮点型
cout << "Point (2D) = " << P << endl << endl;
Point3f P3f(2, 6, 7);//三维点,浮点型
cout << "Point (3D) = " << P3f << endl << endl;
vector<float> v;//创建一个vector<float>对象,类型为浮点型的v
v.push_back( (float)CV_PI);
v.push_back(2);
v.push_back(3.01f);
cout << "Vector of floats via Mat = " << Mat(v) << endl << endl;
vector<Point2f> vPoints(20);//创建20个 vector<Point2f>数组对象,类型为二维点,浮点型
for (size_t i = 0; i < vPoints.size(); ++i)
vPoints[i] = Point2f((float)(i * 5), (float)(i % 7));
cout << "A vector of 2D Points = " << vPoints << endl << endl;
return 0;
}</span>
二,以下转载自网友的对[b]IplImage结构的解读[/b]
原文地址:
http://www.cnblogs.com/libing64/archive/2011/09/17/2878765.html
IplImage结构
由于OpenCV主要针对的是计算机视觉方面的处理,因此在函数库中,最重要的结构体是IplImage结构。IplImage结构来源于Intel的另外一个函数库Intel Image Processing Library (IPL),该函数库主要是针对图像处理。IplImage结构具体定义如下:typedef struct _IplImage
{
int nSize; /* IplImage大小 */
int ID; /* 版本 (=0)*/
int nChannels; /* 大多数OPENCV函数支持1,2,3 或 4 个通道 */
int alphaChannel; /* 被OpenCV忽略 */
int depth; /* 像素的位深度,主要有以下支持格式: IPL_DEPTH_8U, IPL_DEPTH_8S, IPL_DEPTH_16U,IPL_DEPTH_16S, IPL_DEPTH_32S,
IPL_DEPTH_32F 和IPL_DEPTH_64F */
char colorModel[4]; /* 被OpenCV忽略 */
char channelSeq[4]; /* 同上 */
int dataOrder; /* 0 - 交叉存取颜色通道, 1 - 分开的颜色通道.
只有cvCreateImage可以创建交叉存取图像 */
int origin; /*图像原点位置: 0表示顶-左结构,1表示底-左结构 */
int align; /* 图像行排列方式 (4 or 8),在 OpenCV 被忽略,使用 widthStep 代替 */
int width; /* 图像宽像素数 */
int height; /* 图像高像素数*/
struct _IplROI *roi; /* 图像感兴趣区域,当该值非空时,
只对该区域进行处理 */
struct _IplImage *maskROI; /* 在 OpenCV中必须为NULL */
void *imageId; /* 同上*/
struct _IplTileInfo *tileInfo; /*同上*/
int imageSize; /* 图像数据大小(在交叉存取格式下ImageSize=image->height*image->widthStep),单位字节*/
char *imageData; /* 指向排列的图像数据 */
int widthStep; /* 排列的图像行大小,以字节为单位 */
int BorderMode[4]; /* 边际结束模式, 在 OpenCV 被忽略*/
int BorderConst[4]; /* 同上 */
char *imageDataOrigin; /* 指针指向一个不同的图像数据结构(不是必须排列的),是为了纠正图像内存分配准备的 */
} IplImage;
IplImage结构体是整个OpenCV函数库的基础,在定义该结构变量时需要用到函数cvCreatImage,变量定义方法如下:
IplImage* src="/cvCreateImage"(cvSize(400,300), IPL_DEPTH_8U,3);
上句定义了一个IplImage指针变量src,图像的大小是400×300,图像颜色深度8位,3通道图像。
常用的五个函数(I/O)
1. 图像载入函数
函数cvLoadImage载入指定图像文件,并返回指向该文件的IplImage指针。函数支持bmp、jpg、 png、 tiff等格式的图像。其函数原型如下:
IplImage* cvLoadImage( const char* filename, int iscolor);
其中,filename 是待载入图像的名称,包括图像的扩展名;iscolor是一个辅助参数项,可选正数、零和负数三种值,正数表示作为三通道图像载入,零表示该图像作为单通道图像,负数表示载入图像的通道数由图像文件自身决定。
2. 窗口定义函数
函数cvNamedWindow定义一个窗口,用于显示图像。其函数原型如下:
int cvNamedWindow( const char* name, unsigned long flags );
其中,name是窗口名,flags是窗口属性指标值,可以选择CV_WINDOW_AUTOSIZE和0两种值。CV_WINDOW_AUTOSIZE表示窗口尺寸与图像原始尺寸相同,0表示以固定的窗口尺寸显示图像。
3. 图像显示函数
函数cvShowImage是在指定的窗口中显示图像,其函数原型如下:
void cvShowImage( const char* name, const CvArr* image );
其中,name是窗口名称,image是图像类型指针,一般是IplImage指针。
4. 图像保存函数
函数cvSaveImage以指定的文件名保存IplImage类型的指针变量,其函数原型如下:
int cvSaveImage( const char* filename, const CvArr* image );
其中,filename是图像保存路径和名称,image是IplImage指针变量。
5. 图像销毁函数
函数cvReleaseImage销毁已定义的IplImage指针变量,释放占用内存空间。其函数原型如下:
void cvReleaseImage( IplImage** image );
其中,image为已定义的IplImage指针。

相关文章推荐
- 用PowerShell处理复杂Json数据
- nopcommerce中文网
- live555 分析—— OpenRtsp
- Eclipse EE 发布项目导致 Tomcate 的配置文件 server.xml 还原
- centos6.6编译安装nginx-1.8.0
- 自动化运维平台puppet的高级应用
- CentOS 6.5 图文安装教程
- 安装CentOS 7 出错BootLoaderError
- 学习笔记:架构 移动应用架构 开篇(一)
- centos下 安装jdk
- 修改属性页CPropertyPage标题
- Linux多线程同步的几种方式
- linux驱动之模块化编程
- 六种在 Linux 上为你带来 iTunes 般体验的方法
- ZooKeeper监控
- Linux下查找目录或文件
- Linux 设备模型基本概念 (一)
- Linux安装R语言包
- Nginx+PHP(FastCGI)搭建胜过Apache十倍的Web服务器
- 在RedHat/CentOS下安装Docker(不升级内核