在Vega Prime中设定物体的运动路径
2015-06-04 10:53
330 查看
Step1 打开LynXPrime
单击 tools> path tools,打开path tools工具。
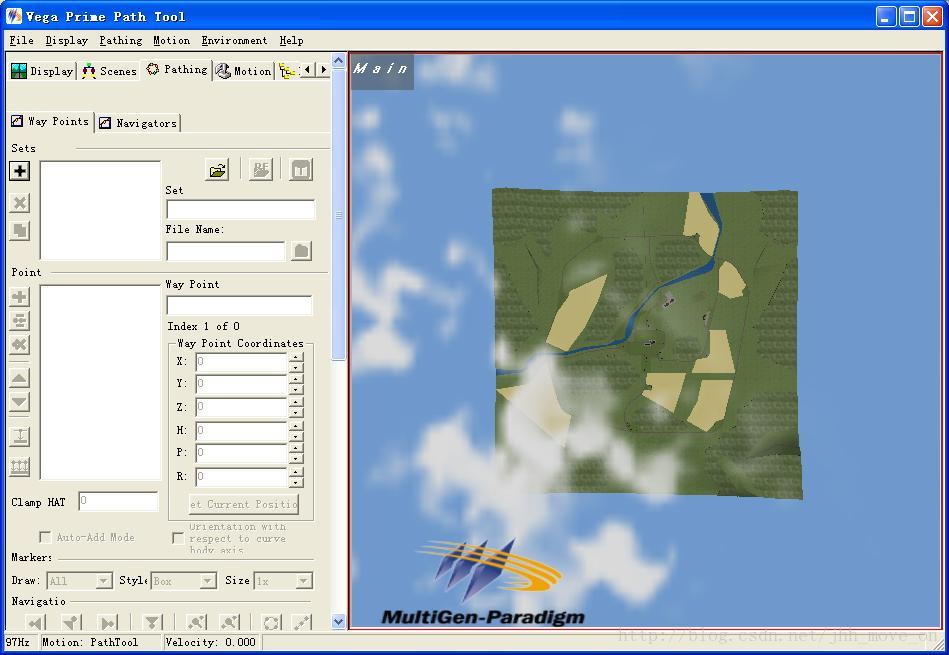
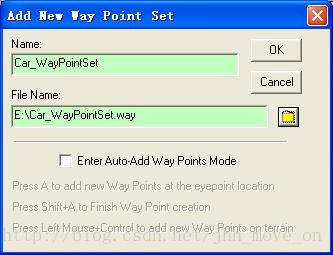
Step2 新建路径点设置文件
点击Way Points面板下的加号按钮新建一个新的路径点设置文件,设置好文件名和保存路径。
Step3 添加并设置路径点
首先,为了便于设置路径点,点击放大按钮,将地形放大显示(注:通过工具面板右下角的四个按钮可以灵活地将地形图或者选中的路径点进行切换和缩放显示)。
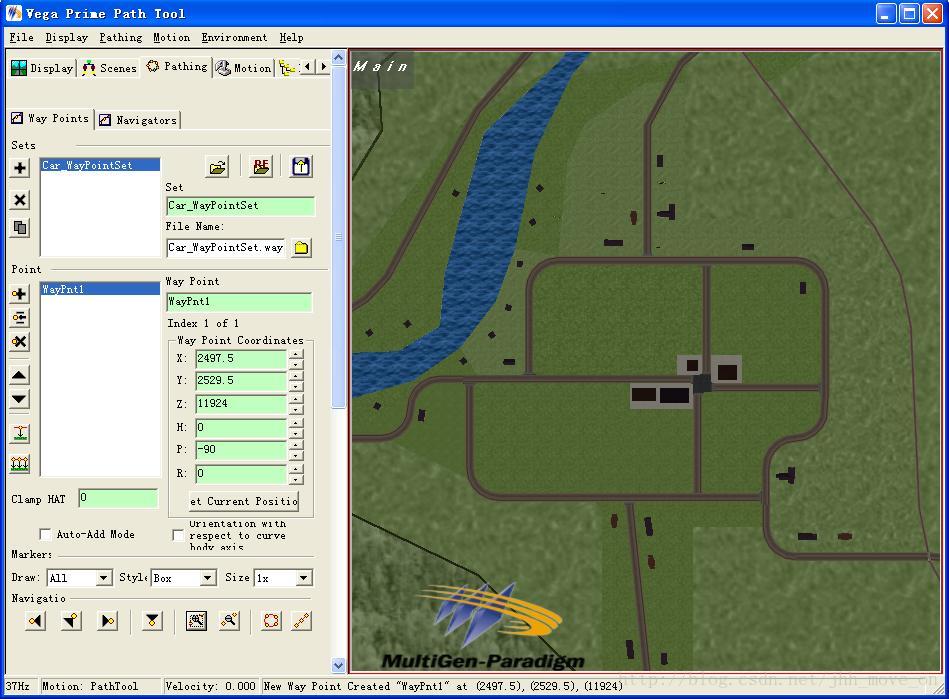
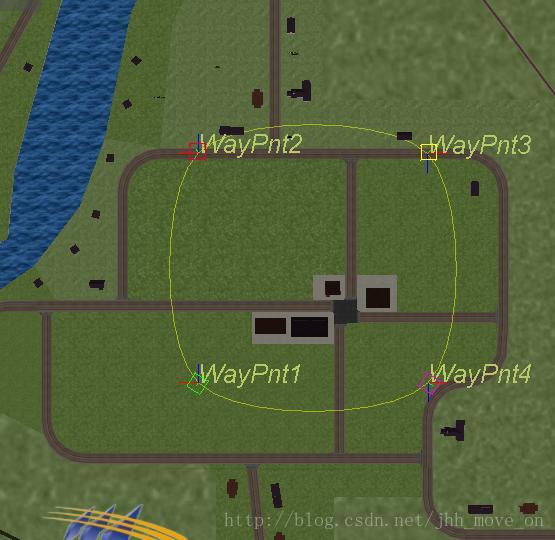
通过点击+新建路径点,设置选项包含了三维坐标点X,Y,Z,及运动方向和运动姿态设置H,P,R,根据需要设置好坐标及方向。在右侧地形俯视图中可以看到新添加的点,第一个点默认为起点。
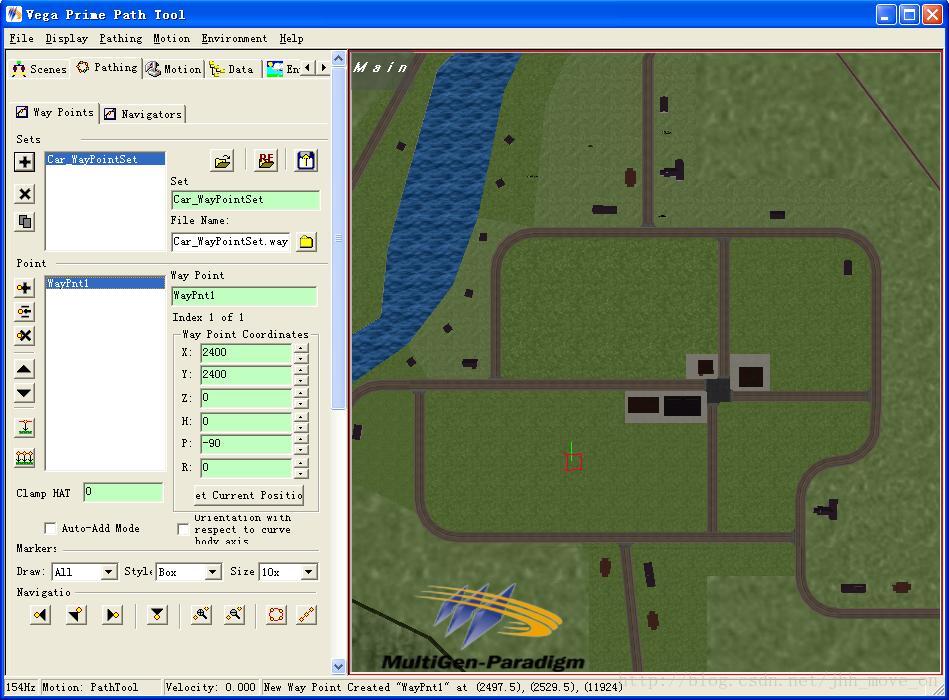
通过Add a new waypoint或insert a new way point 按钮添加并依次设置完其他路径点。最后一个点默认为终点,起点和终点在之后的步骤中可以更改。

Step4 新建导航器设置文件
点击Show Advanced UserInterface,展开新面板,点击+新建路径Car_PathWay,选择之前已建好的相应的路径点设置文件,在这里的例子是carPathWay,选择路径起点和终点,新建一个Navigator文件。

在path ways 面板下的path way rendering中勾选相应选项可选择是否显示每个路径点的标注和是否显示整条路径。路径的颜色和粗细可自行设置,方便预览实际效果。
Step5 设置导航器运动规律
运动的速度变化规律由Path Way面板下的Path way kinematic 设置,有初速度(Initial),持续时间(duration),加速度(Acceleration)。加速度选项中有匀速(constant),指数(exponential),线性(linear),半周期正弦(Sinusoidal Half),四分之一周期正弦(SinusoidalQuarter)。
这样一个很简单的运动路径大概就设好了,包含了Car_Navigator和Car_WayPointSet两个文件,注意要按键来保存,这两个文件在接下来的步骤中都要用到。
Step6 把设好的路径应用到实际的物体上
在LP中新建object,选择一辆汽车作为运动物体。点击工具栏的,点击includedfiles选项卡,把之前做好的car_waypointset.way和car_navigator.nav文件包含进去。点击完成,然后在实例区中选择car,设置car的updateposition方式为car_Navigator(PathNavigator)。
点击,新建一个transform,parent选择car,点击myObserver,Look fromTarget选择myTransform,高度设在car的1000米正上方,观察可见汽车已按规定路径行驶。

单击 tools> path tools,打开path tools工具。
Step2 新建路径点设置文件
点击Way Points面板下的加号按钮新建一个新的路径点设置文件,设置好文件名和保存路径。
Step3 添加并设置路径点
首先,为了便于设置路径点,点击放大按钮,将地形放大显示(注:通过工具面板右下角的四个按钮可以灵活地将地形图或者选中的路径点进行切换和缩放显示)。
通过点击+新建路径点,设置选项包含了三维坐标点X,Y,Z,及运动方向和运动姿态设置H,P,R,根据需要设置好坐标及方向。在右侧地形俯视图中可以看到新添加的点,第一个点默认为起点。
通过Add a new waypoint或insert a new way point 按钮添加并依次设置完其他路径点。最后一个点默认为终点,起点和终点在之后的步骤中可以更改。
Step4 新建导航器设置文件
点击Show Advanced UserInterface,展开新面板,点击+新建路径Car_PathWay,选择之前已建好的相应的路径点设置文件,在这里的例子是carPathWay,选择路径起点和终点,新建一个Navigator文件。
在path ways 面板下的path way rendering中勾选相应选项可选择是否显示每个路径点的标注和是否显示整条路径。路径的颜色和粗细可自行设置,方便预览实际效果。
Step5 设置导航器运动规律
运动的速度变化规律由Path Way面板下的Path way kinematic 设置,有初速度(Initial),持续时间(duration),加速度(Acceleration)。加速度选项中有匀速(constant),指数(exponential),线性(linear),半周期正弦(Sinusoidal Half),四分之一周期正弦(SinusoidalQuarter)。
这样一个很简单的运动路径大概就设好了,包含了Car_Navigator和Car_WayPointSet两个文件,注意要按键来保存,这两个文件在接下来的步骤中都要用到。
Step6 把设好的路径应用到实际的物体上
在LP中新建object,选择一辆汽车作为运动物体。点击工具栏的,点击includedfiles选项卡,把之前做好的car_waypointset.way和car_navigator.nav文件包含进去。点击完成,然后在实例区中选择car,设置car的updateposition方式为car_Navigator(PathNavigator)。
点击,新建一个transform,parent选择car,点击myObserver,Look fromTarget选择myTransform,高度设在car的1000米正上方,观察可见汽车已按规定路径行驶。

相关文章推荐
- C语言本质
- [OK] Reached initrd target default target
- 增强for循环用法
- WIFI基本知识整理 .
- IOS开发之AVAudioRecorder
- java正则表达式
- 机器学习(四、五、六):线性分类、高斯判别分析(GDA)、朴素贝叶斯(NB)
- nopcommerce中文网
- Algorithm --> 动态规划
- mac os 禁止apache httpd自动启动(转)
- 锐浪报表显示(含子报表)
- VS——调用层次结构
- C/C++综合测试题(三)
- 创建和使用库,包括静态库和动态库(共享库)
- c++ 数字字符串按数字的大小进行排序 并统计字符串个数
- android布局属性详解
- Android 判断当前Activity是不是最后一个Activity 以及 应用或Activity是否存在
- Cloudera Manager5配置管理之配置Namenode 的HA
- 【算法】回文判断
- 【转】TFS强制解除签入签出锁定