Coursera Machine Learning 学习笔记(十四)
2015-04-05 01:04
471 查看
- Cost function
对于线性回归模型,我们定义的代价函数是所有模型误差的平方和。理论上来说,我们也可以对逻辑回归模型沿用这个定义,但是问题在于,当我们将
带入到这样定义了的代价函数中时,我们得到的代价函数将是一个非凸函数(non-convex
function)。

这意味着我们的代价函数有许多局部最小值,这将影响梯度下降算法寻找全局最小值。
因此,我们重新定义逻辑回归的代价函数为:

其中


与

之间的关系如下图所示:
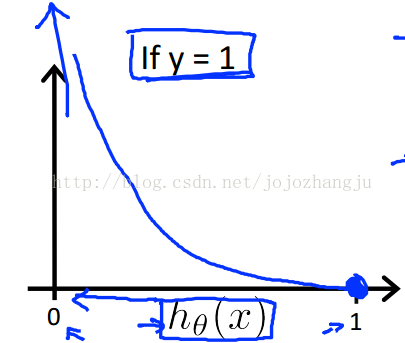
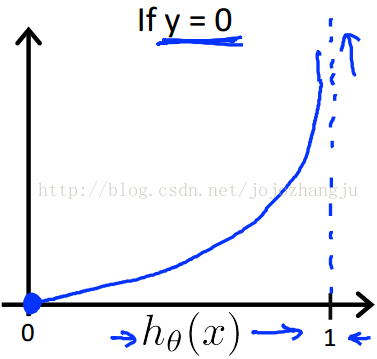
这样构建的
函数的特点是:当实际的y=1且

也为1时误差为0,当y=1但

不为1时误差随着

的变小而变大;当实际的y=0且

为0时代价为0,当y=0但

不为0为误差随着h的变大而变大。
将构建的代价函数简化如下:

带入代价函数得到:

在得到这样一个代价函数以后,我们便可以用梯度下降算法来求得能使代价函数最小的参数了。
算法为:
求导后得到:

注:虽然得到的梯度下降算法表面上看上去与线性回归的梯度下降算法一样,但是这里的假设函数与线性回归中不同,所以实际上是不一样的。另外,在运用梯度下降算法之前,进行特征缩放依旧是非常必要的。
另外,还有一些梯度下降算法之外的选择:
除了梯度下降算法以外还有一些常被用来令代价函数最小的算法,这样算法更加复杂和优越,而且通常不需要人工选择学习率,通常比梯度下降算法更加快速。这些算法有:共轭梯度(Conjugate Gradient),局部优化法(Broyden fletcher goldfarb shann, BFGS)和有限内存局部优化法(LBFGS)
fminunc是matlab和octave中都带的一个最小值优化函数,使用时我们需要提供代价函数和每个参数的求导,下面是octave中使用fminunc函数的代码实例:

对于线性回归模型,我们定义的代价函数是所有模型误差的平方和。理论上来说,我们也可以对逻辑回归模型沿用这个定义,但是问题在于,当我们将
带入到这样定义了的代价函数中时,我们得到的代价函数将是一个非凸函数(non-convex
function)。
这意味着我们的代价函数有许多局部最小值,这将影响梯度下降算法寻找全局最小值。
因此,我们重新定义逻辑回归的代价函数为:
其中
与
之间的关系如下图所示:
这样构建的
函数的特点是:当实际的y=1且
也为1时误差为0,当y=1但
不为1时误差随着
的变小而变大;当实际的y=0且
为0时代价为0,当y=0但
不为0为误差随着h的变大而变大。
将构建的代价函数简化如下:
带入代价函数得到:
在得到这样一个代价函数以后,我们便可以用梯度下降算法来求得能使代价函数最小的参数了。
算法为:
求导后得到:
注:虽然得到的梯度下降算法表面上看上去与线性回归的梯度下降算法一样,但是这里的假设函数与线性回归中不同,所以实际上是不一样的。另外,在运用梯度下降算法之前,进行特征缩放依旧是非常必要的。
另外,还有一些梯度下降算法之外的选择:
除了梯度下降算法以外还有一些常被用来令代价函数最小的算法,这样算法更加复杂和优越,而且通常不需要人工选择学习率,通常比梯度下降算法更加快速。这些算法有:共轭梯度(Conjugate Gradient),局部优化法(Broyden fletcher goldfarb shann, BFGS)和有限内存局部优化法(LBFGS)
fminunc是matlab和octave中都带的一个最小值优化函数,使用时我们需要提供代价函数和每个参数的求导,下面是octave中使用fminunc函数的代码实例:

相关文章推荐
- 设计模式学习笔记(十四)——创建型模式总结
- Linux实践工程师学习笔记十四
- 微软企业库4.1学习笔记(十四)缓存模块2 使用缓存模块进行开发
- NET 应用架构指导 V2 学习笔记(十四) 数据访问层指导
- QT学习笔记之十四 StringMatch
- 新概念第二册学习笔记十四(79--84)
- MCSE 2003学习笔记 十四 群集-应用程序服务器
- 编解码学习笔记(十四):容器(下篇)
- 设计模式学习笔记(十四)——创建型模式总结
- 设计模式学习笔记十四:适配器模式、桥接模式与外观模式
- MySQL学习笔记(十四)―― MySQL的命令集(4)
- MonoRail学习笔记十四:分页功能的使用
- JavaScript 学习笔记(十四) 正则表达式
- WPF and Silverlight 学习笔记(十四):键盘输入、鼠标输入、焦点处理
- oracle9i学习笔记之十四 使用集合运算
- ASP.NET学习笔记十四之Application
- 设计模式学习笔记(十四)—Command模式
- 微软企业库4.1学习笔记(十四)缓存模块2 使用缓存模块进行开发
- 软件工程视频学习笔记(十四)