步进电机的控制 (驱动板为TB6560)
2014-05-23 20:47
323 查看
本文主要讲述了利用单片机对42步进电机进行控制的方法,包括硬件的搭建,软件的调试。
步骤:
1、了解步进电机的工作原理。本文选用的是42步进电机“42BYGH47-401A”
,是一种两相步进电机,额定电流1.5V。具体的步进电机工作原理不在这里阐述,可以百度谷歌。由于选用了TB6560驱动板(可以再淘宝上查看),控制较简单,简而言之就是通过一个I/O给一个指定频率的脉冲,由驱动板进行脉冲信号的放大和分配,只要脉冲的频率在步进电机能够承受的范围内即可。


2、阅读产品说明,搭建硬件电路。 硬件电路需要:42步进电机1个,TB6560驱动板1个,单片机1个,24V稳压电源1个,导线、杜邦线若干,当然还有相关的工具,如万用表等等。在安装前要阅读TB6560的产品说明。
各引脚的意义:
脉冲端:TB6560驱动板只需单片机给一个脉冲即可实现对步进电机的控制。要求脉冲频率适当,在1Khz以内应该没问题。
方向端:控制方向,低电平或悬空时正转,高电平时反转。
使能端:对工作状态进行控制,低电平或悬空为工作状态,高电平为脱机状态。
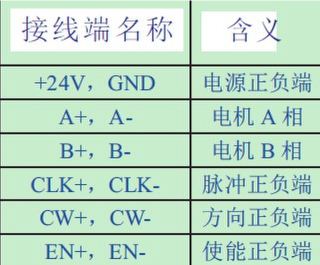
接线方法:
稳压电源正负对应着+24V,GND;
步进电机的4条导线,是分为两组的,每组的导线短接后用手转步进电机会感到明显的阻力,电机的AB相分别对应一组导线即可;
脉冲、方向、使能的正负有两种接法:共阴和共阳。共阴即为将负端接地,正端接输出脉冲的、控制方向的、控制使能的I/O;或正端接+5V的vcc,然后负端接对应的I/O口。 (这三个端口的控制是独立的,可以第一个共阴,第二个共阳,但建议还是规范一些比较好)
3、软件调试:在调试时,建议循序渐进。可以先不接方向、使能端,仅控制脉冲实现步进电机的转动运动。然后再加入方向的控制。
步骤:
1、了解步进电机的工作原理。本文选用的是42步进电机“42BYGH47-401A”
,是一种两相步进电机,额定电流1.5V。具体的步进电机工作原理不在这里阐述,可以百度谷歌。由于选用了TB6560驱动板(可以再淘宝上查看),控制较简单,简而言之就是通过一个I/O给一个指定频率的脉冲,由驱动板进行脉冲信号的放大和分配,只要脉冲的频率在步进电机能够承受的范围内即可。
2、阅读产品说明,搭建硬件电路。 硬件电路需要:42步进电机1个,TB6560驱动板1个,单片机1个,24V稳压电源1个,导线、杜邦线若干,当然还有相关的工具,如万用表等等。在安装前要阅读TB6560的产品说明。
各引脚的意义:
脉冲端:TB6560驱动板只需单片机给一个脉冲即可实现对步进电机的控制。要求脉冲频率适当,在1Khz以内应该没问题。
方向端:控制方向,低电平或悬空时正转,高电平时反转。
使能端:对工作状态进行控制,低电平或悬空为工作状态,高电平为脱机状态。
接线方法:
稳压电源正负对应着+24V,GND;
步进电机的4条导线,是分为两组的,每组的导线短接后用手转步进电机会感到明显的阻力,电机的AB相分别对应一组导线即可;
脉冲、方向、使能的正负有两种接法:共阴和共阳。共阴即为将负端接地,正端接输出脉冲的、控制方向的、控制使能的I/O;或正端接+5V的vcc,然后负端接对应的I/O口。 (这三个端口的控制是独立的,可以第一个共阴,第二个共阳,但建议还是规范一些比较好)
3、软件调试:在调试时,建议循序渐进。可以先不接方向、使能端,仅控制脉冲实现步进电机的转动运动。然后再加入方向的控制。

相关文章推荐
- 基于FreeRTOS与MQTT的物联网技术应用系列——步进电机控制(三)SD卡驱动、FatFS等的移植和ini配置文件读取的实现
- 51控制步进电机的驱动
- FPGA Verilog HDL 系列实例--------步进电机驱动控制
- 51单片机 步进电机的驱动和旋转角度控制
- 步进电机驱动控制器,电动云台控制。
- FPGA Verilog HDL 系列实例--------步进电机驱动控制
- 【连载】 FPGA Verilog HDL 系列实例--------步进电机驱动控制
- 8G服务器磁盘控制卡识别及Windows 2003驱动制作
- [arm驱动]linux并发与竞态---并发控制
- Linux设备驱动之Ioctl控制
- Linux驱动开发-字符设备控制技术笔记 3
- 步进电机工作原理及驱动方法
- Linux设备驱动之Ioctl控制
- 利用Bresenham算法控制多部步进电机匀速转动
- TI-DM8127:MCFW、ISS中对sensor的驱动和控制
- LINUX驱动中的并发控制
- Marlin固件的步进电机控制代码解析
- 在KUKA-youbot的板载PC上安装RT2870型无线网卡驱动并实现远程控制
- linux驱动学习之并发和竞争控制
- ALSA --- amixer控制声卡驱动实现Line-in功能