教你不用编程,设计一个Android蓝牙遥控小车软件
2014-05-20 20:17
507 查看
PS:不需写一行Android代码哦~~~
很多热衷于玩单片机小车、机器人的童靴,往往也向往着有天能自己编写一个Android手机的遥控程序,通过自己的手机遥控小车,单片机程序用C语言或者汇编什么的都可以容易完成,,无奈要写一个上位机的Android控制程序就要会java、还要学一点xml知识,对于只学过C
或C++的人来说……..╮(╯▽╰)╭
不过万能的Google提供了一款云端Android程序开发工具: AppInventor。因为对于想要用手机控制机器人的使用者而言,他们不大需要太华丽的界面,只要使用基本组件例如按钮、文字输入输出即可,所以,App
Inventor 让你抛开复杂的程序代码,使用搭积木式的方法来完成您的Android程序。(完全不需要编程哦)
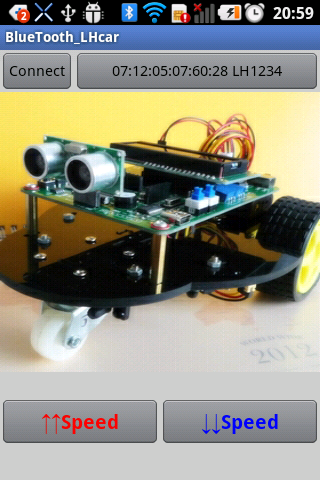
上个效果图先,俺做的智能小车控制软件:
2012-9-8 10:15 上传
下载附件
(119.18 KB)
呵呵,有没有跃跃欲试的冲动?按照下面的步骤一步一步来吧:
一、 要有一台电脑(废话呀…………)
系统需求:
1)Macintosh:Mac OS X 10.5,10.6
2)Windows系列:Windows XP,Windows Vista,Windows
7都可以的
3)GUN/Linux系统:Ubuntu 8+,Debian 5+ 等。

2012-9-8 10:15 上传
下载附件
(3.48 KB)
1)Mozilla Firefox 3.6或更高
2)Apple Safari 5.0或更高
3)Google Chrome 4.0或更高
4)IE6及更高
其次测试一下你的Java环境配置是否正确:
这需要在你的电脑上能够运行Java ,目前官方更新到了Java 7,如果没有安装的话,可以在Oracle官方网站上去下载(我的电脑有没有装了java呢?到java
的官方链接里看一下知道了)。 要有一个Gmail帐号,个人认为Gmail邮箱是必备的邮箱啊,没有就申请一个。
最后,安装App Inventor软件包:在使用App Inventor之前,你还需要安装一个叫做App
Inventor Setup的软件包在你的电脑上。当然你需要根据你的操作系统来下载不同的软件包的。这里我提供的是Windows系统下的软件包,其他的可以在Google的网站上去下载!下载完成后的文件名应该是:AppInventor_Setup_Installer_v_1_2.exe (~92 MB), 点击打开安装即可,这里建议最好不要更改安装路径的。这里提供以下地址:(鉴于无url权限╮(╯▽╰)╭,自己在google上百度一下吧)
到目前为止,以上4个步骤如果都顺利,那么我们可以登录这里开始编写Android软件啦
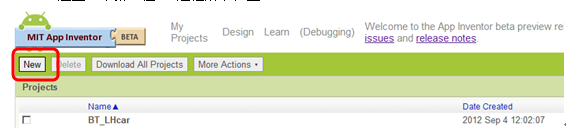
(搜索关键字:appinventor):点击右边的红色“Invent”按钮进入MyProjects页面,这里就可以新建工程,开始编写Android软件了。

2012-9-8 10:15 上传
<
131ff
a title="1346760391_2886.png 下载次数:12" href="http://www.geek-workshop.com/forum.php?mod=attachment&aid=NzE1MHw3YTg2OWJlNnwxNDAwNTg3OTg2fDB8MTg0Mw%3D%3D¬humb=yes">下载附件
(6.18 KB)
网站上也提供了一些教程。有兴趣可以浏览下。
二、 编写下位机(单片机小车)程序,设置好蓝牙通信协议。
走到第二步,对于很多智能小车、机器人爱好者来说都不是问题了。
先理一下Android手机与小车的遥控方式:

2012-9-8 10:15 上传
下载附件
(42.05 KB)
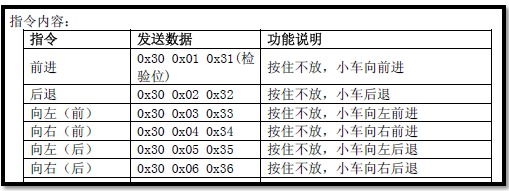
这样一来,手机发送事先规定好的数据指令,蓝牙模块接收到,再传送给小车,小车对指令进行一下Switch,,是前进指令的就前进、该后退的就后退……
相应的,下位机小车应该要有的几个基本功能函数,它们应该是:
前进函数(Forward(void) )、后退(Backward(void)
)、左转(Lift(void))、右转(Right(void) )、停止(Stop(void) )。
这里名称是否一致,内容是什么的无关紧要,你也可以拿来控制机器人相应的动作,下位机由人怎么写控制函数的程序段都行。。这里是我们设定的小车的协议,有这个现成的下位机程序供我们驱动,玩其他智能小车、机器人的童靴可以自己编嘛。
(程序在: LHcar光盘\No.3-Lighthouse源代码\Chapter10-小车综合程序\No.8-Android遥控蓝牙小车)

2012-9-8 10:15 上传
下载附件
(13.63 KB)
2012-9-8 10:15 上传
下载附件
(29.97 KB)
目前就先控制这几个命令吧,协议里面加、减速,转圈等功能就不做控制了。
个人按照自己的要求写好下位机程序,这一步就算完成了。
三、 利用Appinventor开始搭建Android控制软件。
第三步了,在这之前先对Appinventor界面做一下讲解:
A、建立一个新工程:(红框所示位置)
2012-9-8 10:15 上传
下载附件
(28.43 KB)
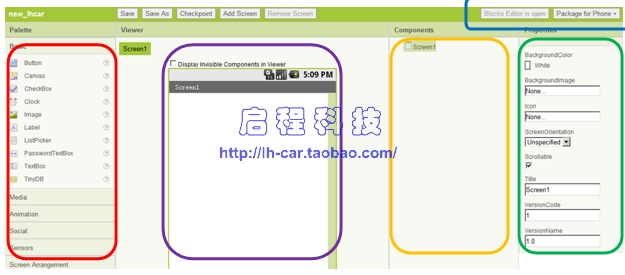
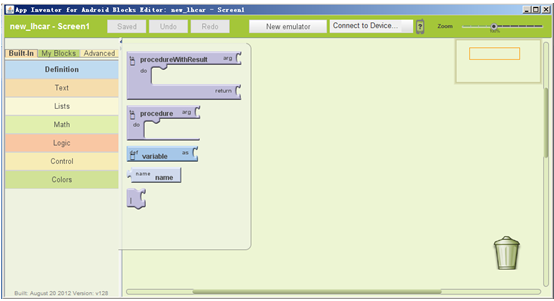
B、如图,进入到了软件编辑界面以此可见各个区域的功能(控件编辑区、虚拟的软件界面、软件所添加使用的控件、当前选中控件的属性、“Block
Editor”and“Package for Phone”)
2012-9-8 10:15 上传
下载附件
(81.73 KB)
我们将需要使用的控件从控件编辑区拖拽到虚拟的软件界面,并对相应的控件,修改其属性。
添加完控件,点击“Block Editor”将进入搭积木式的编程界面
:
2012-9-8 10:15 上传
下载附件
(37.81 KB)

2012-9-8 10:15 上传
下载附件
(3.31 KB)
“New emulator”是生成一个Android***,由于体态传感器和蓝牙设备模拟器是无法实现的,所以还是连接自己的手机吧,右边的“Connect
to Device”可以连接自己的手机,这样编程过程中,会实时的显示软件界面和程序运行状况。
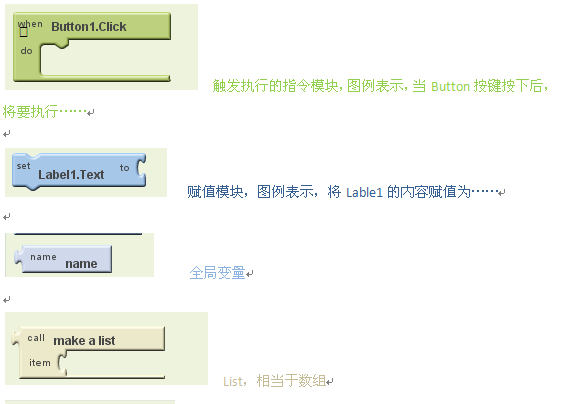
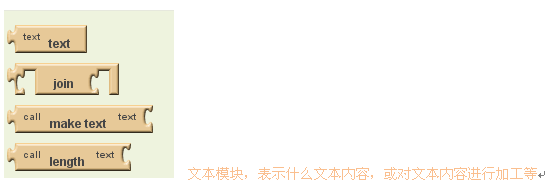
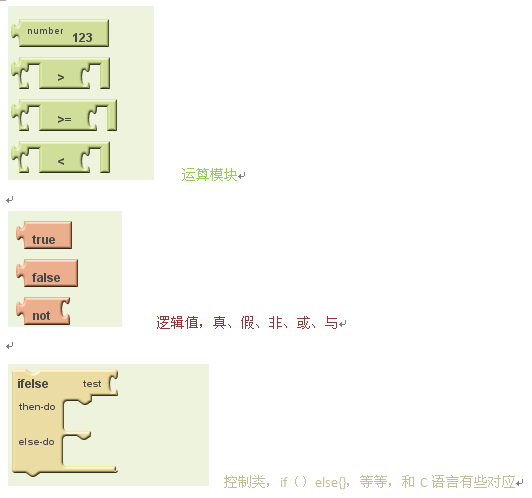
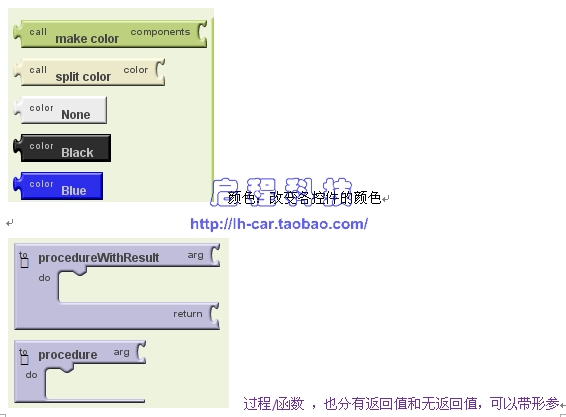
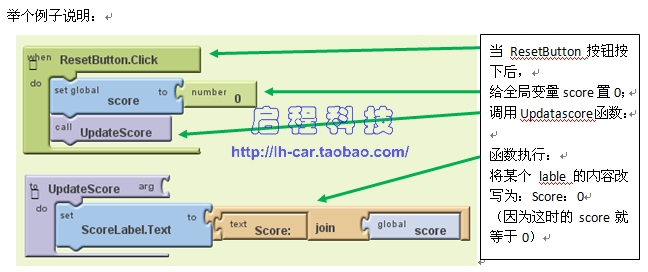
Block Editor里面各类模块代表的意义:
2012-9-8 10:15 上传
下载附件
(14.85 KB)
2012-9-8 10:15 上传
下载附件
(9.34 KB)
2012-9-8 10:15 上传
下载附件
(18.31 KB)
2012-9-8 10:15 上传
下载附件
(71.49 KB)
2012-9-8 10:15 上传
下载附件
(103.04 KB)
现在该考虑一下我们的Android软件要怎么运行,列出来需要哪些控件。
向前按钮、向后按钮、向左、向右、………,哦,不要这样吧,试一试手机的重力感应功能,通过手机体态传感器来控制小车显然比按按钮更酷一些。
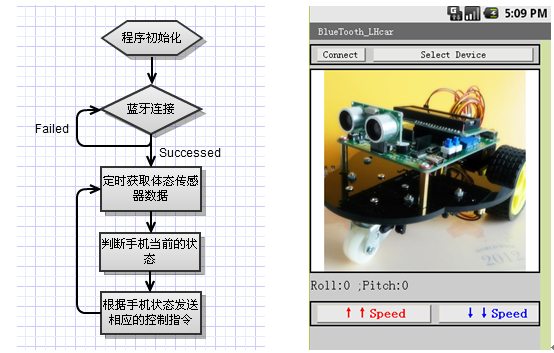
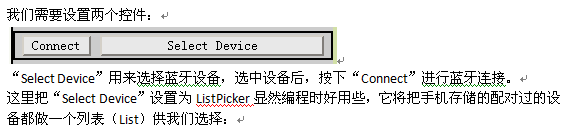
简要流程图: 我的手机软件截图:
2012-9-8 10:15 上传
下载附件
(99.58 KB)
可能要添加的控件:
Button :按钮,用来触发某功能
Label: 标签,用来显示当前状态
BluetoothClient : 蓝牙控件,用来蓝牙配对、连接、通信。
Clock: 时钟,定时触发某程序段
OrientationSensor: 体态传感器,目前绝大多数的手机都有的,用来获取手机当前的状态(倾倒度数、斜率角度等等);
TinyDB :一款手机上的简易数据库控件,这里用来记录软件上次运行时配对过的蓝牙设备,便于选取。
Notifier :警示窗口,当软件运行出现意外时,提示信息,避免程序崩溃掉。
Arrangement :把按钮、Label等控件排列整齐
图文详解:

2012-9-8 10:15 上传
下载附件
(159.01 KB)
考虑更多的细节……
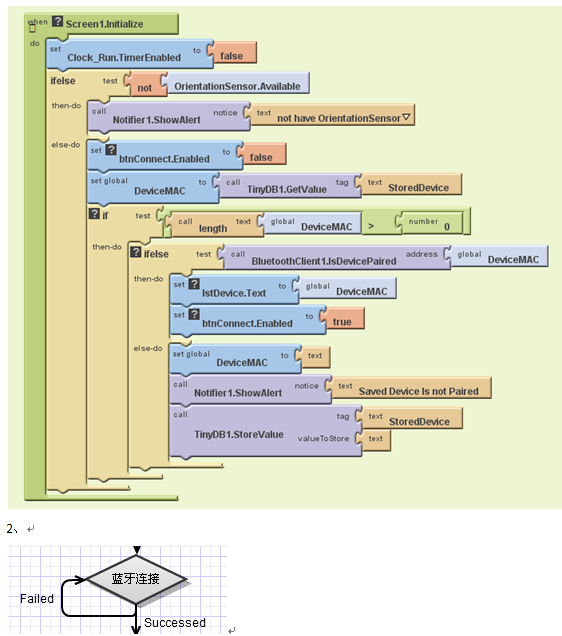
1、
2012-9-8 10:15 上传
下载附件
(8.21 KB)
程序初始化时:
应该检查体态传感器是否存在于手机,没有传感器的话,再往下也就没有执行的意义了;
时钟当前最好设置为关闭状态,因为蓝牙还没有连接呢,还不需要读取传感器、判断手机动作吧;
读取数据库,之前有没有配对过的蓝牙设备呢?有的话就列出出来,供我们下面选择,没有也得告诉一下我们吧;
2012-9-8 10:15 上传
下载附件
(105.98 KB)
2012-9-8 10:15 上传
下载附件
(6.21 KB)
2012-9-8 10:15 上传
下载附件
(18.96 KB)
2012-9-8 10:15 上传
下载附件
(40.68 KB)
2012-9-8 10:15 上传
下载附件
(14.97 KB)
2012-9-8 10:15 上传
下载附件
(158.49 KB)
2012-9-8 10:15 上传
下载附件
(18.82 KB)
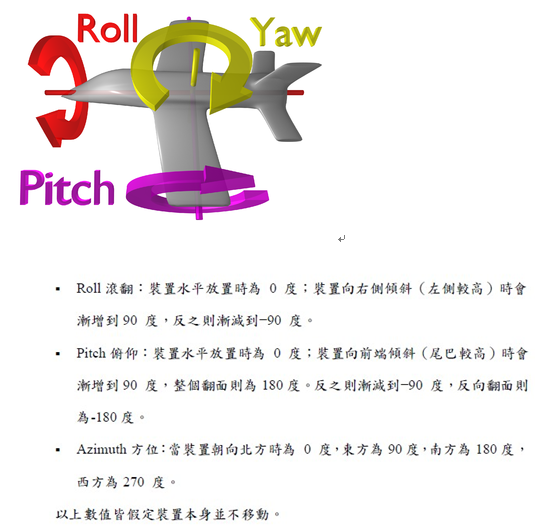
这里借用一张图片:
(X轴: Pitch, Y轴: Roll, Z轴: Yaw, (App Inventor中称为Azimuth方位角).)
2012-9-8 10:15 上传
下载附件
(155.3 KB)
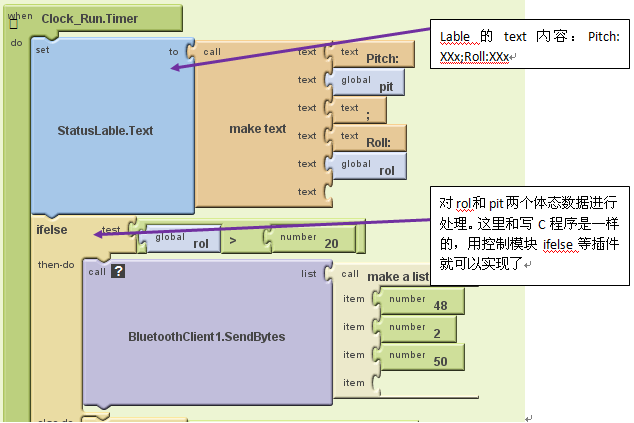
可以用手机自测一下,这用我们只用Roll 和Pitch两个数据,当手机平置时,它们接近于0,当手机前翻或侧翻时,两个值分别在±90之间变化。利用这两个数据便可搭建传送蓝牙指令的程序了。
4、
2012-9-8 10:15 上传
下载附件
(2.9 KB)
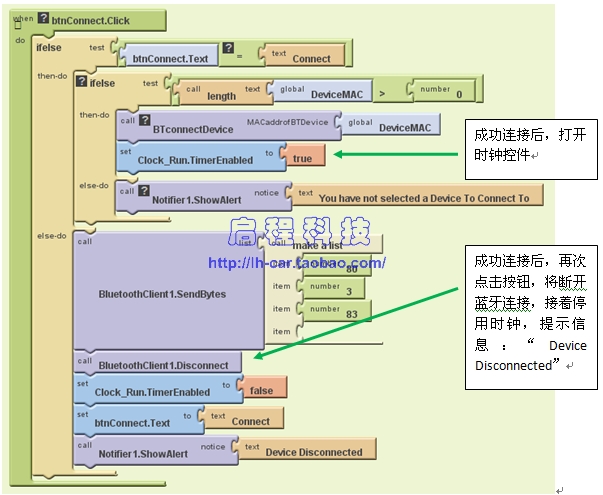
我们把发送指令的程序段放在时钟里面,这里每300ms执行一次程序段:
2012-9-8 10:15 上传
下载附件
(40.96 KB)
5、
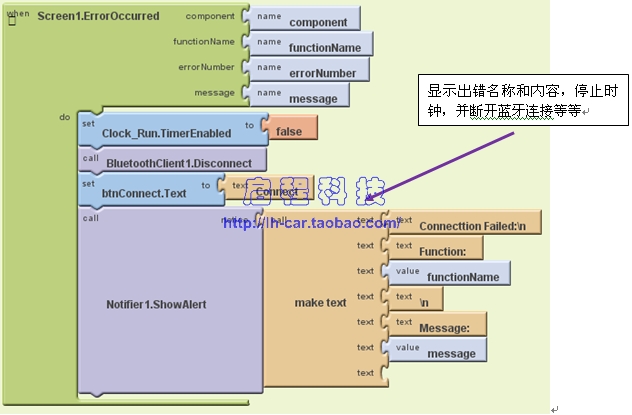
最后考虑一下当程序出错了要怎么办吧:
2012-9-8 10:15 上传
下载附件
(110.76 KB)
Final:
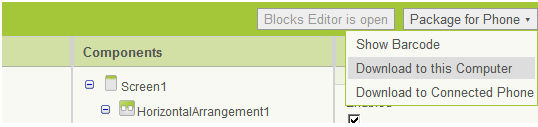
自此,程序模块搭建完成了,返回到软件便捷界面。点击“Download to this
Computer”等一小会就会下载下来打包的.apk文件,安装到手机里面就可以使用了。
2012-9-8 10:15 上传
下载附件
(8.63 KB)
这里提供一个好看点的Ico图标:

很多热衷于玩单片机小车、机器人的童靴,往往也向往着有天能自己编写一个Android手机的遥控程序,通过自己的手机遥控小车,单片机程序用C语言或者汇编什么的都可以容易完成,,无奈要写一个上位机的Android控制程序就要会java、还要学一点xml知识,对于只学过C
或C++的人来说……..╮(╯▽╰)╭
不过万能的Google提供了一款云端Android程序开发工具: AppInventor。因为对于想要用手机控制机器人的使用者而言,他们不大需要太华丽的界面,只要使用基本组件例如按钮、文字输入输出即可,所以,App
Inventor 让你抛开复杂的程序代码,使用搭积木式的方法来完成您的Android程序。(完全不需要编程哦)
上个效果图先,俺做的智能小车控制软件:
2012-9-8 10:15 上传
下载附件
(119.18 KB)
呵呵,有没有跃跃欲试的冲动?按照下面的步骤一步一步来吧:
一、 要有一台电脑(废话呀…………)
系统需求:
1)Macintosh:Mac OS X 10.5,10.6
2)Windows系列:Windows XP,Windows Vista,Windows
7都可以的
3)GUN/Linux系统:Ubuntu 8+,Debian 5+ 等。
2012-9-8 10:15 上传
下载附件
(3.48 KB)
1)Mozilla Firefox 3.6或更高
2)Apple Safari 5.0或更高
3)Google Chrome 4.0或更高
4)IE6及更高
其次测试一下你的Java环境配置是否正确:
这需要在你的电脑上能够运行Java ,目前官方更新到了Java 7,如果没有安装的话,可以在Oracle官方网站上去下载(我的电脑有没有装了java呢?到java
的官方链接里看一下知道了)。 要有一个Gmail帐号,个人认为Gmail邮箱是必备的邮箱啊,没有就申请一个。
最后,安装App Inventor软件包:在使用App Inventor之前,你还需要安装一个叫做App
Inventor Setup的软件包在你的电脑上。当然你需要根据你的操作系统来下载不同的软件包的。这里我提供的是Windows系统下的软件包,其他的可以在Google的网站上去下载!下载完成后的文件名应该是:AppInventor_Setup_Installer_v_1_2.exe (~92 MB), 点击打开安装即可,这里建议最好不要更改安装路径的。这里提供以下地址:(鉴于无url权限╮(╯▽╰)╭,自己在google上百度一下吧)
到目前为止,以上4个步骤如果都顺利,那么我们可以登录这里开始编写Android软件啦
(搜索关键字:appinventor):点击右边的红色“Invent”按钮进入MyProjects页面,这里就可以新建工程,开始编写Android软件了。
2012-9-8 10:15 上传
<
131ff
a title="1346760391_2886.png 下载次数:12" href="http://www.geek-workshop.com/forum.php?mod=attachment&aid=NzE1MHw3YTg2OWJlNnwxNDAwNTg3OTg2fDB8MTg0Mw%3D%3D¬humb=yes">下载附件
(6.18 KB)
网站上也提供了一些教程。有兴趣可以浏览下。
二、 编写下位机(单片机小车)程序,设置好蓝牙通信协议。
走到第二步,对于很多智能小车、机器人爱好者来说都不是问题了。
先理一下Android手机与小车的遥控方式:
2012-9-8 10:15 上传
下载附件
(42.05 KB)
这样一来,手机发送事先规定好的数据指令,蓝牙模块接收到,再传送给小车,小车对指令进行一下Switch,,是前进指令的就前进、该后退的就后退……
相应的,下位机小车应该要有的几个基本功能函数,它们应该是:
前进函数(Forward(void) )、后退(Backward(void)
)、左转(Lift(void))、右转(Right(void) )、停止(Stop(void) )。
这里名称是否一致,内容是什么的无关紧要,你也可以拿来控制机器人相应的动作,下位机由人怎么写控制函数的程序段都行。。这里是我们设定的小车的协议,有这个现成的下位机程序供我们驱动,玩其他智能小车、机器人的童靴可以自己编嘛。
(程序在: LHcar光盘\No.3-Lighthouse源代码\Chapter10-小车综合程序\No.8-Android遥控蓝牙小车)
2012-9-8 10:15 上传
下载附件
(13.63 KB)
2012-9-8 10:15 上传
下载附件
(29.97 KB)
目前就先控制这几个命令吧,协议里面加、减速,转圈等功能就不做控制了。
个人按照自己的要求写好下位机程序,这一步就算完成了。
三、 利用Appinventor开始搭建Android控制软件。
第三步了,在这之前先对Appinventor界面做一下讲解:
A、建立一个新工程:(红框所示位置)
2012-9-8 10:15 上传
下载附件
(28.43 KB)
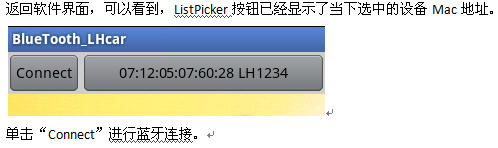
B、如图,进入到了软件编辑界面以此可见各个区域的功能(控件编辑区、虚拟的软件界面、软件所添加使用的控件、当前选中控件的属性、“Block
Editor”and“Package for Phone”)
2012-9-8 10:15 上传
下载附件
(81.73 KB)
我们将需要使用的控件从控件编辑区拖拽到虚拟的软件界面,并对相应的控件,修改其属性。
添加完控件,点击“Block Editor”将进入搭积木式的编程界面
:
2012-9-8 10:15 上传
下载附件
(37.81 KB)
2012-9-8 10:15 上传
下载附件
(3.31 KB)
“New emulator”是生成一个Android***,由于体态传感器和蓝牙设备模拟器是无法实现的,所以还是连接自己的手机吧,右边的“Connect
to Device”可以连接自己的手机,这样编程过程中,会实时的显示软件界面和程序运行状况。
Block Editor里面各类模块代表的意义:
2012-9-8 10:15 上传
下载附件
(14.85 KB)
2012-9-8 10:15 上传
下载附件
(9.34 KB)
2012-9-8 10:15 上传
下载附件
(18.31 KB)
2012-9-8 10:15 上传
下载附件
(71.49 KB)
2012-9-8 10:15 上传
下载附件
(103.04 KB)
现在该考虑一下我们的Android软件要怎么运行,列出来需要哪些控件。
向前按钮、向后按钮、向左、向右、………,哦,不要这样吧,试一试手机的重力感应功能,通过手机体态传感器来控制小车显然比按按钮更酷一些。
简要流程图: 我的手机软件截图:
2012-9-8 10:15 上传
下载附件
(99.58 KB)
可能要添加的控件:
Button :按钮,用来触发某功能
Label: 标签,用来显示当前状态
BluetoothClient : 蓝牙控件,用来蓝牙配对、连接、通信。
Clock: 时钟,定时触发某程序段
OrientationSensor: 体态传感器,目前绝大多数的手机都有的,用来获取手机当前的状态(倾倒度数、斜率角度等等);
TinyDB :一款手机上的简易数据库控件,这里用来记录软件上次运行时配对过的蓝牙设备,便于选取。
Notifier :警示窗口,当软件运行出现意外时,提示信息,避免程序崩溃掉。
Arrangement :把按钮、Label等控件排列整齐
图文详解:
2012-9-8 10:15 上传
下载附件
(159.01 KB)
考虑更多的细节……
1、
2012-9-8 10:15 上传
下载附件
(8.21 KB)
程序初始化时:
应该检查体态传感器是否存在于手机,没有传感器的话,再往下也就没有执行的意义了;
时钟当前最好设置为关闭状态,因为蓝牙还没有连接呢,还不需要读取传感器、判断手机动作吧;
读取数据库,之前有没有配对过的蓝牙设备呢?有的话就列出出来,供我们下面选择,没有也得告诉一下我们吧;
2012-9-8 10:15 上传
下载附件
(105.98 KB)
2012-9-8 10:15 上传
下载附件
(6.21 KB)
2012-9-8 10:15 上传
下载附件
(18.96 KB)
2012-9-8 10:15 上传
下载附件
(40.68 KB)
2012-9-8 10:15 上传
下载附件
(14.97 KB)
2012-9-8 10:15 上传
下载附件
(158.49 KB)
2012-9-8 10:15 上传
下载附件
(18.82 KB)
这里借用一张图片:
(X轴: Pitch, Y轴: Roll, Z轴: Yaw, (App Inventor中称为Azimuth方位角).)
2012-9-8 10:15 上传
下载附件
(155.3 KB)
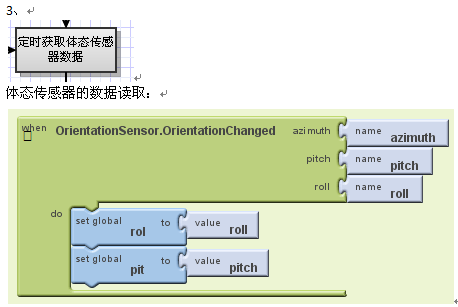
可以用手机自测一下,这用我们只用Roll 和Pitch两个数据,当手机平置时,它们接近于0,当手机前翻或侧翻时,两个值分别在±90之间变化。利用这两个数据便可搭建传送蓝牙指令的程序了。
4、
2012-9-8 10:15 上传
下载附件
(2.9 KB)
我们把发送指令的程序段放在时钟里面,这里每300ms执行一次程序段:
2012-9-8 10:15 上传
下载附件
(40.96 KB)
5、
最后考虑一下当程序出错了要怎么办吧:
2012-9-8 10:15 上传
下载附件
(110.76 KB)
Final:
自此,程序模块搭建完成了,返回到软件便捷界面。点击“Download to this
Computer”等一小会就会下载下来打包的.apk文件,安装到手机里面就可以使用了。
2012-9-8 10:15 上传
下载附件
(8.63 KB)
这里提供一个好看点的Ico图标:

相关文章推荐
- 无需编程,DIY自己智能小车的Android蓝牙遥控软件(一)
- 无需编程,DIY自己智能小车的Android蓝牙遥控软件(三)
- 无需编程,DIY自己智能小车的Android蓝牙遥控软件(二)
- 无需编程,DIY自己智能小车的Android蓝牙遥控软件(一)
- 无需编程,DIY自己智能小车的Android蓝牙遥控软件(一)
- 无需编程,DIY自己智能小车的Android蓝牙遥控软件(一)
- 无需编程,DIY自己智能小车的Android蓝牙遥控软件(二)
- 无需编程,DIY自己智能小车的Android蓝牙遥控软件(三)
- 蓝牙遥控小车设计(四)——Android APP遥控
- Android蓝牙遥控小车软件
- 蓝牙遥控小车设计(三)——Amarino和 Android手机重力感应控制
- Android实训案例(九)——答题系统的思绪,自己设计一个题库的体验,一个思路清晰的答题软件制作过程
- Android编程心得-设计一个可重用的自定义Dialog
- 一个定期翻译国外Android优质的技术、开源库、软件架构设计、测试等文章的开源项目
- 一个定期翻译国外Android优质的技术、开源库、软件架构设计、测试等文章的开源项目
- 蓝牙遥控小车设计(二)——车体搭建和利用串口遥控小车
- 帮同学做了一个Android重力加速度传感器蓝牙控制小车的程序
- 谷歌Android UI设计技巧 --- UI的设计的成败决定一个软件的成败
- 试用socket api借口设计一个文件传送软件,并编程实现,可自定义文件传输的通信。
- 一个读书软件的设计(Android),排除同质化,粗制滥造的书籍