OpenCV学习笔记-自适应阈值化
2014-03-10 22:08
399 查看
自适应阈值化的函数为:
自适应阈值方法
src输入图像.dst输出图像.max_value使用 CV_THRESH_BINARY 和 CV_THRESH_BINARY_INV 的最大值.adaptive_method自适应阈值算法使用:CV_ADAPTIVE_THRESH_MEAN_C 或 CV_ADAPTIVE_THRESH_GAUSSIAN_C (见讨论).threshold_type取阈值类型:必须是下者之一
CV_THRESH_BINARY,
CV_THRESH_BINARY_INV
block_size用来计算阈值的象素邻域大小: 3, 5, 7, ...param1与方法有关的参数。对方法 CV_ADAPTIVE_THRESH_MEAN_C 和 CV_ADAPTIVE_THRESH_GAUSSIAN_C, 它是一个从均值或加权均值提取的常数(见讨论), 尽管它可以是负数。
函数 cvAdaptiveThreshold 将灰度图像变换到二值图像,采用下面公式:
其中 TI 是为每一个象素点单独计算的阈值
对方法 CV_ADAPTIVE_THRESH_MEAN_C,先求出块中的均值,再减掉param1。
对方法 CV_ADAPTIVE_THRESH_GAUSSIAN_C ,先求出块中的加权和(gaussian), 再减掉param1。
================================================================================================================
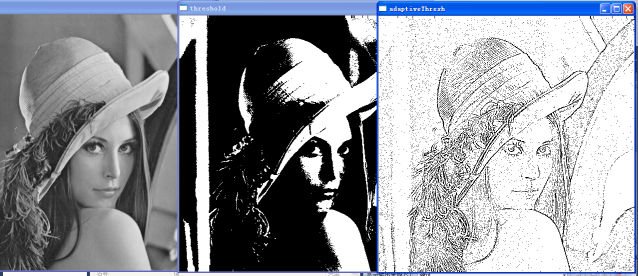
下面的例题对阈值化和自适应阈值化进行了比较:
[cpp] view
plaincopy
#include "StdAfx.h"
#include <cv.h>
#include <highgui.h>
#include <math.h>
IplImage* Igray = 0;
IplImage* It = 0;
IplImage* Iat;
void main()
{
Igray = cvLoadImage("lena.png", CV_LOAD_IMAGE_GRAYSCALE);
It = cvCreateImage(cvSize(Igray->width, Igray->height),IPL_DEPTH_8U, 1);
Iat = cvCreateImage(cvSize(Igray->width, Igray->height),IPL_DEPTH_8U, 1);
cvThreshold(Igray, It, 150, 255,CV_THRESH_BINARY);
cvAdaptiveThreshold(Igray, Iat, 255, CV_ADAPTIVE_THRESH_MEAN_C, CV_THRESH_BINARY, 3, 5);
cvNamedWindow("orignal", 1);
cvNamedWindow("threshold", 1);
cvNamedWindow("adaptiveThresh", 1);
cvShowImage("orignal", Igray);
cvShowImage("threshold", It);
cvShowImage("adaptiveThresh", Iat);
cvWaitKey(0);
cvReleaseImage(&Igray);
cvReleaseImage(&It);
cvReleaseImage(&Iat);
cvDestroyWindow("orignal");
cvDestroyWindow("threshold");
cvDestroyWindow("adaptiveThresh");
}
运算结果为:
参考文献:
1.学习OpenCV,于仕祺,刘瑞祯,清华大学出版社,pp.159-161
2.http://blog.csdn.net/cartoonface/article/details/6011334
3.http://www.opencv.org.cn/index.php/Cv%E5%9B%BE%E5%83%8F%E5%A4%84%E7%90%86#AdaptiveThreshold
转自http://blog.csdn.net/superdont/article/details/6661994
AdaptiveThreshold
自适应阈值方法void cvAdaptiveThreshold( const CvArr* src, CvArr* dst, double max_value,
int adaptive_method=CV_ADAPTIVE_THRESH_MEAN_C,
int threshold_type=CV_THRESH_BINARY,
int block_size=3, double param1=5 );src输入图像.dst输出图像.max_value使用 CV_THRESH_BINARY 和 CV_THRESH_BINARY_INV 的最大值.adaptive_method自适应阈值算法使用:CV_ADAPTIVE_THRESH_MEAN_C 或 CV_ADAPTIVE_THRESH_GAUSSIAN_C (见讨论).threshold_type取阈值类型:必须是下者之一
CV_THRESH_BINARY,
CV_THRESH_BINARY_INV
block_size用来计算阈值的象素邻域大小: 3, 5, 7, ...param1与方法有关的参数。对方法 CV_ADAPTIVE_THRESH_MEAN_C 和 CV_ADAPTIVE_THRESH_GAUSSIAN_C, 它是一个从均值或加权均值提取的常数(见讨论), 尽管它可以是负数。
函数 cvAdaptiveThreshold 将灰度图像变换到二值图像,采用下面公式:
threshold_type=CV_THRESH_BINARY:
dst(x,y) = max_value, if src(x,y)>T(x,y)
0, otherwise
threshold_type=CV_THRESH_BINARY_INV:
dst(x,y) = 0, if src(x,y)>T(x,y)
max_value, otherwise其中 TI 是为每一个象素点单独计算的阈值
对方法 CV_ADAPTIVE_THRESH_MEAN_C,先求出块中的均值,再减掉param1。
对方法 CV_ADAPTIVE_THRESH_GAUSSIAN_C ,先求出块中的加权和(gaussian), 再减掉param1。
================================================================================================================
下面的例题对阈值化和自适应阈值化进行了比较:
[cpp] view
plaincopy
#include "StdAfx.h"
#include <cv.h>
#include <highgui.h>
#include <math.h>
IplImage* Igray = 0;
IplImage* It = 0;
IplImage* Iat;
void main()
{
Igray = cvLoadImage("lena.png", CV_LOAD_IMAGE_GRAYSCALE);
It = cvCreateImage(cvSize(Igray->width, Igray->height),IPL_DEPTH_8U, 1);
Iat = cvCreateImage(cvSize(Igray->width, Igray->height),IPL_DEPTH_8U, 1);
cvThreshold(Igray, It, 150, 255,CV_THRESH_BINARY);
cvAdaptiveThreshold(Igray, Iat, 255, CV_ADAPTIVE_THRESH_MEAN_C, CV_THRESH_BINARY, 3, 5);
cvNamedWindow("orignal", 1);
cvNamedWindow("threshold", 1);
cvNamedWindow("adaptiveThresh", 1);
cvShowImage("orignal", Igray);
cvShowImage("threshold", It);
cvShowImage("adaptiveThresh", Iat);
cvWaitKey(0);
cvReleaseImage(&Igray);
cvReleaseImage(&It);
cvReleaseImage(&Iat);
cvDestroyWindow("orignal");
cvDestroyWindow("threshold");
cvDestroyWindow("adaptiveThresh");
}
运算结果为:
参考文献:
1.学习OpenCV,于仕祺,刘瑞祯,清华大学出版社,pp.159-161
2.http://blog.csdn.net/cartoonface/article/details/6011334
3.http://www.opencv.org.cn/index.php/Cv%E5%9B%BE%E5%83%8F%E5%A4%84%E7%90%86#AdaptiveThreshold
转自http://blog.csdn.net/superdont/article/details/6661994

相关文章推荐
- Emgu 学习笔记(二)---图像二值化,自适应阈值化,Otsu二值化
- 【OpenCV学习笔记】十六、图像阈值化
- OpenCV学习笔记-阈值化
- Opencv学习笔记-----图像阈值化处理
- OpenCV学习笔记-阈值化
- EM算法学习笔记_2(opencv自带EM sample学习)
- Opencv学习笔记-线性变换
- OpenCV学习笔记(三)人脸检测的代码分析(1)
- OpenCV学习笔记06--数据存储、配置文件
- OPENCV学习笔记(1)
- 【opencv学习笔记七】访问图像中的像素与图像亮度对比度调整
- Python OpenCV学习笔记之:判断OpenCV是否已经打开优化功能
- OpenCV学习笔记(18):在OpenCV中利用鼠标绘制矩形和截取图像的矩形区域
- OpenCV2学习笔记(二十):Win8.1 64位+OpenCV 2.4.9+Python2.7.9配置
- opencv学习笔记(九)捕获摄像头的视频并保存成avi格式
- OpenCv学习笔记(四):使用split函数提取彩色图像的三个通道
- OpenCV学习笔记一
- 《OpenCV 3计算机视觉:Python语言实现》学习笔记——目标跟踪中基本运动检测的思考
- opencv_python学习笔记三
- opencv学习笔记(2)----矩阵运算