Lesson 2: Udacity Intro to Parallel Programming
2014-02-11 05:42
232 查看
lesson 1的一一对应的GPU programming,比如matrix 相乘,从彩色图变成灰阶图。这些都是一一对应的算法。

在这一课,主要讲的是:spencil 以及各种map的parallel programming。
注意,这2个算法的object都是相互独立,没有overlap。在lesson 3以及后续课程将会介绍例如:
reduce, scan, histogram这类算法,其object会有相互重叠之处。
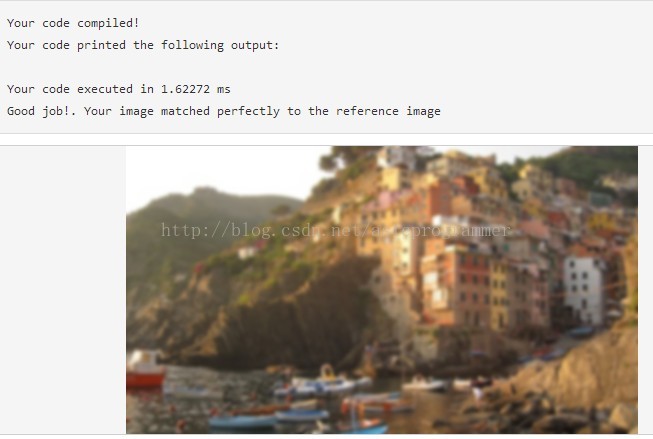
作业就是用的stencil来将filter和图片convolution,从而blur的更加细腻而不是stencil直接去方格的平均数。
结果如下:
source code:
csdn的snippet怎么总是502 bad gateway???、
在这一课,主要讲的是:spencil 以及各种map的parallel programming。
注意,这2个算法的object都是相互独立,没有overlap。在lesson 3以及后续课程将会介绍例如:
reduce, scan, histogram这类算法,其object会有相互重叠之处。
作业就是用的stencil来将filter和图片convolution,从而blur的更加细腻而不是stencil直接去方格的平均数。
结果如下:
source code:
// Homework 2
// Image Blurring
//
// In this homework we are blurring an image. To do this, imagine that we have
// a square array of weight values. For each pixel in the image, imagine that we
// overlay this square array of weights on top of the image such that the center
// of the weight array is aligned with the current pixel. To compute a blurred
// pixel value, we multiply each pair of numbers that line up. In other words, we
// multiply each weight with the pixel underneath it. Finally, we add up all of the
// multiplied numbers and assign that value to our output for the current pixel.
// We repeat this process for all the pixels in the image.
// To help get you started, we have included some useful notes here.
//****************************************************************************
// For a color image that has multiple channels, we suggest separating
// the different color channels so that each color is stored contiguously
// instead of being interleaved. This will simplify your code.
// That is instead of RGBARGBARGBARGBA... we suggest transforming to three
// arrays (as in the previous homework we ignore the alpha channel again):
// 1) RRRRRRRR...
// 2) GGGGGGGG...
// 3) BBBBBBBB...
//
// The original layout is known an Array of Structures (AoS) whereas the
// format we are converting to is known as a Structure of Arrays (SoA).
// As a warm-up, we will ask you to write the kernel that performs this
// separation. You should then write the "meat" of the assignment,
// which is the kernel that performs the actual blur. We provide code that
// re-combines your blurred results for each color channel.
//****************************************************************************
// You must fill in the gaussian_blur kernel to perform the blurring of the
// inputChannel, using the array of weights, and put the result in the outputChannel.
// Here is an example of computing a blur, using a weighted average, for a single
// pixel in a small image.
//
// Array of weights:
//
// 0.0 0.2 0.0
// 0.2 0.2 0.2
// 0.0 0.2 0.0
//
// Image (note that we align the array of weights to the center of the box):
//
// 1 2 5 2 0 3
// -------
// 3 |2 5 1| 6 0 0.0*2 + 0.2*5 + 0.0*1 +
// | |
// 4 |3 6 2| 1 4 -> 0.2*3 + 0.2*6 + 0.2*2 + -> 3.2
// | |
// 0 |4 0 3| 4 2 0.0*4 + 0.2*0 + 0.0*3
// -------
// 9 6 5 0 3 9
//
// (1) (2) (3)
//
// A good starting place is to map each thread to a pixel as you have before.
// Then every thread can perform steps 2 and 3 in the diagram above
// completely independently of one another.
// Note that the array of weights is square, so its height is the same as its width.
// We refer to the array of weights as a filter, and we refer to its width with the
// variable filterWidth.
//****************************************************************************
// Your homework submission will be evaluated based on correctness and speed.
// We test each pixel against a reference solution. If any pixel differs by
// more than some small threshold value, the system will tell you that your
// solution is incorrect, and it will let you try again.
// Once you have gotten that working correctly, then you can think about using
// shared memory and having the threads cooperate to achieve better performance.
//****************************************************************************
// Also note that we've supplied a helpful debugging function called checkCudaErrors.
// You should wrap your allocation and copying statements like we've done in the
// code we're supplying you. Here is an example of the unsafe way to allocate
// memory on the GPU:
//
// cudaMalloc(&d_red, sizeof(unsigned char) * numRows * numCols);
//
// Here is an example of the safe way to do the same thing:
//
// checkCudaErrors(cudaMalloc(&d_red, sizeof(unsigned char) * numRows * numCols));
//
// Writing code the safe way requires slightly more typing, but is very helpful for
// catching mistakes. If you write code the unsafe way and you make a mistake, then
// any subsequent kernels won't compute anything, and it will be hard to figure out
// why. Writing code the safe way will inform you as soon as you make a mistake.
// Finally, remember to free the memory you allocate at the end of the function.
//****************************************************************************
#include "reference_calc.cpp"
#include "utils.h"
__global__
void gaussian_blur(const unsigned char* const inputChannel,
unsigned char* const outputChannel,
int numRows, int numCols,
const float* const filter, const int filterWidth)
{
// TODO
// NOTE: Be sure to compute any intermediate results in floating point
// before storing the final result as unsigned char.
// NOTE: Be careful not to try to access memory that is outside the bounds of
// the image. You'll want code that performs the following check before accessing
// GPU memory:
//
// if ( absolute_image_position_x >= numCols ||
// absolute_image_position_y >= numRows )
// {
// return;
// }
// NOTE: If a thread's absolute position 2D position is within the image, but some of
// its neighbors are outside the image, then you will need to be extra careful. Instead
// of trying to read such a neighbor value from GPU memory (which won't work because
// the value is out of bounds), you should explicitly clamp the neighbor values you read
// to be within the bounds of the image. If this is not clear to you, then please refer
// to sequential reference solution for the exact clamping semantics you should follow.
/*
** here is the step 1 of this hw
*/
const int2 thread_2D_pos = make_int2(blockIdx.x * blockDim.x + threadIdx.x,
blockIdx.y * blockDim.y + threadIdx.y );
const int thread_1D_pos = thread_2D_pos.y * numCols + thread_2D_pos.x;
if(thread_2D_pos.x >= numCols || thread_2D_pos.y >= numRows){
return;
}
int rows = numRows-1;
int cols = numCols-1;
int halfwidth = filterWidth/2;
float blur = 0.0f;
for (int filter_r = -halfwidth; filter_r <= halfwidth; ++filter_r){
for (int filter_c = -halfwidth; filter_c <= halfwidth; ++filter_c){
int i = min(max((thread_2D_pos.y + filter_r),0),rows);
int j = min(max((thread_2D_pos.x + filter_c),0),cols);
int idx = i * numCols + j;
blur += inputChannel[idx] * filter[(filter_r + halfwidth) * filterWidth +
(filter_c + halfwidth)];
}
}
outputChannel[thread_1D_pos] = blur;
/*
**
*/
}
//This kernel takes in an image represented as a uchar4 and splits
//it into three images consisting of only one color channel each
__global__
void separateChannels(const uchar4* const inputImageRGBA,
int numRows,
int numCols,
unsigned char* const redChannel,
unsigned char* const greenChannel,
unsigned char* const blueChannel)
{
// TODO
//
// NOTE: Be careful not to try to access memory that is outside the bounds of
// the image. You'll want code that performs the following check before accessing
// GPU memory:
//
// if ( absolute_image_position_x >= numCols ||
// absolute_image_position_y >= numRows )
// {
// return;
// }
/*
** here is the step 2 of the hw
*/
const int2 thread_2D_pos = make_int2(blockIdx.x * blockDim.x + threadIdx.x,
blockIdx.y * blockDim.y + threadIdx.y);
if(thread_2D_pos.x >= numCols || thread_2D_pos.y >= numRows){
return; // check if the pixel is out of the boundary
}
const int thread_1D_pos = thread_2D_pos.y * numCols + thread_2D_pos.x;
uchar4 rgba = inputImageRGBA[thread_1D_pos]; //rgba = RGBARGBARGBARGBA...
redChannel[thread_1D_pos] = rgba.x;
greenChannel[thread_1D_pos] = rgba.y;
blueChannel[thread_1D_pos] = rgba.z;
/*
**
*/
}
//This kernel takes in three color channels and recombines them
//into one image. The alpha channel is set to 255 to represent
//that this image has no transparency.
__global__
void recombineChannels(const unsigned char* const redChannel,
const unsigned char* const greenChannel,
const unsigned char* const blueChannel,
uchar4* const outputImageRGBA,
int numRows,
int numCols)
{
const int2 thread_2D_pos = make_int2( blockIdx.x * blockDim.x + threadIdx.x,
blockIdx.y * blockDim.y + threadIdx.y);
const int thread_1D_pos = thread_2D_pos.y * numCols + thread_2D_pos.x;
//make sure we don't try and access memory outside the image
//by having any threads mapped there return early
if (thread_2D_pos.x >= numCols || thread_2D_pos.y >= numRows)
return;
unsigned char red = redChannel[thread_1D_pos];
unsigned char green = greenChannel[thread_1D_pos];
unsigned char blue = blueChannel[thread_1D_pos];
//Alpha should be 255 for no transparency
uchar4 outputPixel = make_uchar4(red, green, blue, 255);
outputImageRGBA[thread_1D_pos] = outputPixel;
}
unsigned char *d_red, *d_green, *d_blue;
float *d_filter;
void allocateMemoryAndCopyToGPU(const size_t numRowsImage, const size_t numColsImage,
const float* const h_filter, const size_t filterWidth)
{
//allocate memory for the three different channels
//original
checkCudaErrors(cudaMalloc(&d_red, sizeof(unsigned char) * numRowsImage * numColsImage));
checkCudaErrors(cudaMalloc(&d_green, sizeof(unsigned char) * numRowsImage * numColsImage));
checkCudaErrors(cudaMalloc(&d_blue, sizeof(unsigned char) * numRowsImage * numColsImage));
//TODO:
//Allocate memory for the filter on the GPU
//Use the pointer d_filter that we have already declared for you
//You need to allocate memory for the filter with cudaMalloc
//be sure to use checkCudaErrors like the above examples to
//be able to tell if anything goes wrong
//IMPORTANT: Notice that we pass a pointer to a pointer to cudaMalloc
checkCudaErrors(cudaMalloc(&d_filter, sizeof(float) * filterWidth * filterWidth));
//TODO:
//Copy the filter on the host (h_filter) to the memory you just allocated
//on the GPU. cudaMemcpy(dst, src, numBytes, cudaMemcpyHostToDevice);
//Remember to use checkCudaErrors!
checkCudaErrors(cudaMemcpy(d_filter, h_filter, sizeof(float) * filterWidth * filterWidth,
cudaMemcpyHostToDevice));
}
void your_gaussian_blur(const uchar4 * const h_inputImageRGBA, uchar4 * const d_inputImageRGBA,
uchar4* const d_outputImageRGBA, const size_t numRows, const size_t numCols,
unsigned char *d_redBlurred,
unsigned char *d_greenBlurred,
unsigned char *d_blueBlurred,
const int filterWidth)
{
//TODO: Set reasonable block size (i.e., number of threads per block)
const dim3 blockSize(16,16);
//TODO:
//Compute correct grid size (i.e., number of blocks per kernel launch)
//from the image size and and block size.
const dim3 gridSize((numCols + 15)/16, (numRows + 15)/16);
//TODO: Launch a kernel for separating the RGBA image into different color channels
separateChannels<<>>(d_inputImageRGBA,
numRows,
numCols,
d_red,
d_green,
d_blue);
// Call cudaDeviceSynchronize(), then call checkCudaErrors() immediately after
// launching your kernel to make sure that you didn't make any mistakes.
cudaDeviceSynchronize(); checkCudaErrors(cudaGetLastError());
//TODO: Call your convolution kernel here 3 times, once for each color channel.
gaussian_blur<<>>(
d_red,
d_redBlurred,
numRows, numCols,
d_filter, filterWidth);
gaussian_blur<<>>(
d_green,
d_greenBlurred,
numRows, numCols,
d_filter, filterWidth);
gaussian_blur<<>>(
d_blue,
d_blueBlurred,
numRows, numCols,
d_filter, filterWidth);
// Again, call cudaDeviceSynchronize(), then call checkCudaErrors() immediately after
// launching your kernel to make sure that you didn't make any mistakes.
cudaDeviceSynchronize(); checkCudaErrors(cudaGetLastError());
// Now we recombine your results. We take care of launching this kernel for you.
//
// NOTE: This kernel launch depends on the gridSize and blockSize variables,
// which you must set yourself.
recombineChannels<<>>(d_redBlurred,
d_greenBlurred,
d_blueBlurred,
d_outputImageRGBA,
numRows,
numCols);
cudaDeviceSynchronize(); checkCudaErrors(cudaGetLastError());
}
//Free all the memory that we allocated
//TODO: make sure you free any arrays that you allocated
void cleanup() {
checkCudaErrors(cudaFree(d_red));
checkCudaErrors(cudaFree(d_green));
checkCudaErrors(cudaFree(d_blue));
}csdn的snippet怎么总是502 bad gateway???、

相关文章推荐
- Udacity cs344-Introduction to Parallel Programming学习笔记-第四单元
- Udacity cs344-Introduction to Parallel Programming学习笔记-第一单元
- Programming By Intention/Intro to JUnit
- http://www.icodeblog.com/2008/11/03/iphone-programming-tutorial-intro-to-soap-web-services/
- Three Methods to Parallel Programming Decomposition
- Udacity cs344-Introduction to Parallel Programming学习笔记-第三单元
- #Udacity#Intro_to_Computer_Science#Study_Note
- The quiz 1 of Intro to Parallel Program
- Udacity cs344-Introduction to Parallel Programming学习笔记-第四单元
- Udacity cs344-Introduction to Parallel Programming学习笔记-如何在VS环境下编译课程习题代码
- Introduction to Multi-Threaded, Multi-Core and Parallel Programming concepts
- Fast Intro To Java Programming (1)
- Fast Intro To Java Programming (2)
- Intro to Computer Science Class Online (CS101) - Udacity
- Udacity cs344-Introduction to Parallel Programming学习笔记-第二单元
- MIT Introduction to Computer Science and Programming (Lesson one )
- notes of “An Introduction to Parallelprogramming - Peter S. Pacheco”
- A Brief intro to X11 Programming
- 【Qt官方视频码农】Qt_03-Intro_to_GUI_programming
- Back To Basics: Intro to Object Oriented Programming