OpenGL中的拾取(Picking)
2013-09-21 22:15
225 查看
OpenGL本身支持基于图像空间的拾取,这里指的是几何拾取,即由屏幕点击触发一条射线,然后和场景中的物体求交,进而判断是否拾取到物体。现在先把OpenGL的投影矩阵和视口变换矩阵列出来:
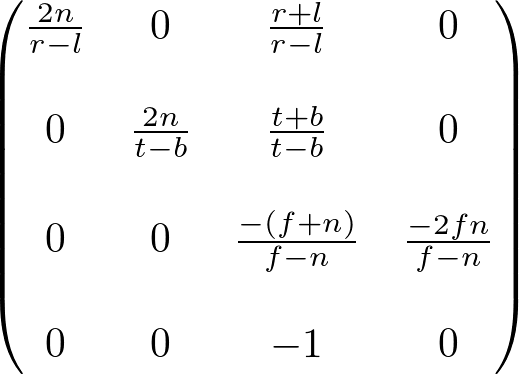
OpenGL的投影矩阵:
OpenGL的视口变换矩阵:
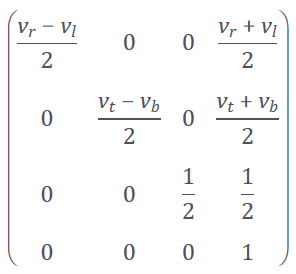
假设鼠标点击屏幕(X,Y)位置,现在把它逆变换到NDC空间,假设其坐标为(Xn,Yn),结合视口变换矩阵可以求得:
Xn = ( X - (Vr + Vl)/2 ) / (Vr-Vl)/2 = ( X - VP_Center_X ) / Half_VP_Width
Yn = ( Y - (Vt + Vb)/2 ) / (Vt-Vb)/2 = ( Y - VP_Center_Y ) / Half_VP_Height
上面的参数分别代表视口的中心以及视口的宽度和高度。
接下来要把NDC坐标(Xn,Yn)变换到投影面坐标P(Xp,Yp)以构造拾取射线,现在假设在视图空间中有某个点(Xe,Ye,Ze)刚好投影到P点,则根据投影矩阵可得到下式:
Xn = -2n/(r-l)Xe/Ze - (r+l) / (r-l) = 2/(r-l)Xp - (r+l)/(r-l)
Yn = -2n/(t-b)Ye/Ze - (t+b) / (t-b) = 2/(t-b)Yp- (t+b)/(t-b)
可以进一步解得Xp,Yp:
Xp = ( Xn*(r-l) + (r+l) ) / 2;
Yp = ( Yn*(t-b) + (t+b) ) / 2;
求得了投影面坐标P之后,就可以在视图空间从原点到点Q(Xp,Yp,-n)可连接得到一条射线,接下来就用这条射线与场景中的物体进行相交测试了;可以把所有物体都变换到视图空间,然后直接为OQ求交,也可以把射线变换到世界空间甚至模型空间进行求交;由于仅仅变换射线的开销比变换物体的所有顶点小,因此可以把射线直接变换到模型空间进行求交。假设某个物体的世界变换矩阵为W,当前的视图变换矩阵为M,则射线在模型空间中的坐标为:Q' = inverse(W)*inverse(M)*Q,只需用射线OO‘与模型的面片进行求交测试即可,为了加快速度,可以用一些空间数据结构表示物体,如八叉树,层次包围盒等。
过几天把实现程序以及源代码贴上来。
OpenGL的投影矩阵:
OpenGL的视口变换矩阵:
假设鼠标点击屏幕(X,Y)位置,现在把它逆变换到NDC空间,假设其坐标为(Xn,Yn),结合视口变换矩阵可以求得:
Xn = ( X - (Vr + Vl)/2 ) / (Vr-Vl)/2 = ( X - VP_Center_X ) / Half_VP_Width
Yn = ( Y - (Vt + Vb)/2 ) / (Vt-Vb)/2 = ( Y - VP_Center_Y ) / Half_VP_Height
上面的参数分别代表视口的中心以及视口的宽度和高度。
接下来要把NDC坐标(Xn,Yn)变换到投影面坐标P(Xp,Yp)以构造拾取射线,现在假设在视图空间中有某个点(Xe,Ye,Ze)刚好投影到P点,则根据投影矩阵可得到下式:
Xn = -2n/(r-l)Xe/Ze - (r+l) / (r-l) = 2/(r-l)Xp - (r+l)/(r-l)
Yn = -2n/(t-b)Ye/Ze - (t+b) / (t-b) = 2/(t-b)Yp- (t+b)/(t-b)
可以进一步解得Xp,Yp:
Xp = ( Xn*(r-l) + (r+l) ) / 2;
Yp = ( Yn*(t-b) + (t+b) ) / 2;
求得了投影面坐标P之后,就可以在视图空间从原点到点Q(Xp,Yp,-n)可连接得到一条射线,接下来就用这条射线与场景中的物体进行相交测试了;可以把所有物体都变换到视图空间,然后直接为OQ求交,也可以把射线变换到世界空间甚至模型空间进行求交;由于仅仅变换射线的开销比变换物体的所有顶点小,因此可以把射线直接变换到模型空间进行求交。假设某个物体的世界变换矩阵为W,当前的视图变换矩阵为M,则射线在模型空间中的坐标为:Q' = inverse(W)*inverse(M)*Q,只需用射线OO‘与模型的面片进行求交测试即可,为了加快速度,可以用一些空间数据结构表示物体,如八叉树,层次包围盒等。
过几天把实现程序以及源代码贴上来。

相关文章推荐
- [转载]深入理解OpenGL拾取模式(OpenGL Picking)
- 深入理解OpenGL拾取模式(OpenGL Picking)转载收藏
- 深入理解OpenGL拾取模式(OpenGL Picking)
- 理解OpenGL拾取模式(OpenGL Picking)
- 深入理解OpenGL拾取模式(OpenGL Picking)
- 深入理解OpenGL拾取模式(OpenGL Picking)
- 理解OpenGL拾取模式(OpenGL Picking)
- OpenGL中的拾取模式( Picking)
- 理解OpenGL拾取模式(OpenGL Picking)
- 理解OpenGL拾取模式(OpenGL Picking)
- 深入理解OpenGL拾取模式(OpenGL Picking)
- 理解OpenGL拾取模式(OpenGL Picking)
- 理解OpenGL拾取模式(OpenGL Picking)
- 深入理解OpenGL拾取模式(OpenGL Picking)(转载)
- 理解OpenGL拾取模式(OpenGL Picking)
- 深入理解OpenGL拾取模式(OpenGL Picking)
- 深入理解OpenGL拾取模式(OpenGL Picking)
- OpenGL 射线 拾取
- OpenGL鼠标拾取的实现:终于搞定(包括细节问题)
- OpenGL选择与拾取GL_SELECT 附源码