Linux I2C驱动完全分析(二)
2013-09-16 10:16
399 查看
博主按:大热的天,刚刚负重从五道口走到石板房,大约4公里吧。终于让我找了一个咖啡屋休息一下,继续写这篇驱动分析。单身的生活就是这样无聊啊。 不发牢骚了,活出个样儿来给自己看!千难万险脚下踩,啥也难不倒咱!继续整!~
先说一下,本文中有个疑惑,一直没有搞懂,写在这里,望高人指点一二,不胜感激!
#define I2C_M_NOSTART 0x4000 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_REV_DIR_ADDR 0x2000 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_IGNORE_NAK 0x1000 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_NO_RD_ACK 0x0800 /* if I2C_FUNC_PROTOCOL_MANGLING */
这里I2C_FUNC_PROTOCOL_MANGLING 是什么意思?为什么定义这些东东?看了注释也不太理解。求解释!
3. I2C总线驱动代码分析
s3c2440的总线驱动代码在i2c-s3c2410.c中。照例先从init看起。
[c-sharp]
view plaincopyprint?
static
int __init i2c_adap_s3c_init(void)
{
return platform_driver_register(&s3c24xx_i2c_driver);
}
static int __init i2c_adap_s3c_init(void) { return platform_driver_register(&s3c24xx_i2c_driver); }
在init中只是调用了平台驱动注册函数注册了一个i2c的平台驱动s3c24xx_i2c_driver。这个驱动是一个platform_driver的结构体变量。注意这里不是i2c_driver结构体,因为i2c_driver是对设备的驱动,而这里对控制器的驱动要使用platform_driver
[c-sharp]
view plaincopyprint?
static
struct platform_driver s3c24xx_i2c_driver = {
.probe = s3c24xx_i2c_probe,
.remove = s3c24xx_i2c_remove,
.suspend_late = s3c24xx_i2c_suspend_late,
.resume = s3c24xx_i2c_resume,
.id_table = s3c24xx_driver_ids,
.driver = {
.owner = THIS_MODULE,
.name = "s3c-i2c",
},
};
static struct platform_driver s3c24xx_i2c_driver = { .probe = s3c24xx_i2c_probe, .remove = s3c24xx_i2c_remove, .suspend_late = s3c24xx_i2c_suspend_late, .resume = s3c24xx_i2c_resume, .id_table = s3c24xx_driver_ids, .driver = { .owner = THIS_MODULE, .name =
"s3c-i2c", }, };
同样的,重要的函数还是那几个:probe,remove,suspend_late,resume。再加上一个id_table和device_driver结构体变量。
下面逐个分析:
* probe函数
当调用platform_driver_register函数注册platform_driver结构体时,probe指针指向的s3c24xx_i2c_probe函数将会被调用。这部分详细解释参考本博客另一篇文章《S3C2410看门狗驱动分析》。细心的朋友可能会发现,在s3c24xx_i2c_driver中,驱动的名字是"s3c-i2c",而在板文件中可以看到,设备的名字是"s3c2410-i2c",这两个名字不一样,那驱动和设备是如何match的呢?答案就在于id_table。这个id_table包含了驱动所支持的设备ID表。在match的时候,判断这个表中的名字是不是和设备一致,一致则match成功。这也是为什么一个驱动可以同时match成功多个设备的原因。如果只是靠platform_driver-->driver中的名字来匹配的话,那么驱动和设备只能是一对一的关系了。
[c-sharp]
view plaincopyprint?
static
struct platform_device_id s3c24xx_driver_ids[] = {
{
.name = "s3c2410-i2c",
.driver_data = TYPE_S3C2410,
}, {
.name = "s3c2440-i2c",
.driver_data = TYPE_S3C2440,
}, { },
};
static struct platform_device_id s3c24xx_driver_ids[] = { { .name = "s3c2410-i2c", .driver_data = TYPE_S3C2410, }, { .name = "s3c2440-i2c", .driver_data = TYPE_S3C2440, }, { }, };
扯远了,还是看看probe的代码吧~
[c-sharp]
view plaincopyprint?
static
int s3c24xx_i2c_probe(struct platform_device *pdev)
{
struct s3c24xx_i2c *i2c;
struct s3c2410_platform_i2c *pdata;
struct resource *res;
int ret;
pdata = pdev->dev.platform_data;
if (!pdata) {
dev_err(&pdev->dev, "no platform data/n");
return -EINVAL;
}
//给s3c24xx_i2c结构体申请空间
i2c = kzalloc(sizeof(struct s3c24xx_i2c), GFP_KERNEL);
if (!i2c) {
dev_err(&pdev->dev, "no memory for state/n");
return -ENOMEM;
}
//填充s3c24xx_i2c结构体中各项,包括名称、所有者、算法、所属class等等
strlcpy(i2c->adap.name, "s3c2410-i2c",
sizeof(i2c->adap.name));
i2c->adap.owner = THIS_MODULE;
i2c->adap.algo = &s3c24xx_i2c_algorithm; //这个下面会重点介绍
i2c->adap.retries = 2;
i2c->adap.class = I2C_CLASS_HWMON | I2C_CLASS_SPD;
i2c->tx_setup = 50;
spin_lock_init(&i2c->lock);
init_waitqueue_head(&i2c->wait);
/* find the clock and enable it */
// 找到i2c始终并且使能它
i2c->dev = &pdev->dev;
i2c->clk = clk_get(&pdev->dev, "i2c");
if (IS_ERR(i2c->clk)) {
dev_err(&pdev->dev, "cannot get clock/n");
ret = -ENOENT;
goto err_noclk;
}
dev_dbg(&pdev->dev, "clock source %p/n", i2c->clk);
clk_enable(i2c->clk);
/* map the registers */
/*映射寄存器*/
res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
if (res == NULL) {
dev_err(&pdev->dev, "cannot find IO resource/n");
ret = -ENOENT;
goto err_clk;
}
i2c->ioarea = request_mem_region(res->start, resource_size(res),
pdev->name);
if (i2c->ioarea == NULL) {
dev_err(&pdev->dev, "cannot request IO/n");
ret = -ENXIO;
goto err_clk;
}
i2c->regs = ioremap(res->start, resource_size(res));
if (i2c->regs == NULL) {
dev_err(&pdev->dev, "cannot map IO/n");
ret = -ENXIO;
goto err_ioarea;
}
dev_dbg(&pdev->dev, "registers %p (%p, %p)/n",
i2c->regs, i2c->ioarea, res);
/* setup info block for the i2c core */
i2c->adap.algo_data = i2c;
i2c->adap.dev.parent = &pdev->dev;
/* initialise the i2c controller */
/*s3c24xx_i2c结构体变量i2c的必要的信息都填充完了以后,开始进行初始化*/
ret = s3c24xx_i2c_init(i2c);
if (ret != 0)
goto err_iomap;
/* find the IRQ for this unit (note, this relies on the init call to
* ensure no current IRQs pending
*/
//接下来申请中断
i2c->irq = ret = platform_get_irq(pdev, 0);
if (ret <= 0) {
dev_err(&pdev->dev, "cannot find IRQ/n");
goto err_iomap;
}
ret = request_irq(i2c->irq, s3c24xx_i2c_irq, IRQF_DISABLED,
dev_name(&pdev->dev), i2c);
if (ret != 0) {
dev_err(&pdev->dev, "cannot claim IRQ %d/n", i2c->irq);
goto err_iomap;
}
ret = s3c24xx_i2c_register_cpufreq(i2c);
if (ret < 0) {
dev_err(&pdev->dev, "failed to register cpufreq notifier/n");
goto err_irq;
}
/* Note, previous versions of the driver used i2c_add_adapter()
* to add the bus at any number. We now pass the bus number via
* the platform data, so if unset it will now default to always
* being bus 0.
*/
i2c->adap.nr = pdata->bus_num;
//看到了吧?下面调用了i2c-core中的i2c_add_adapter函数来添加一个i2c控制器
//i2c_add_numbered_adapter和i2c_add_adapter的区别在于前者用来添加一个在CPU内
//部集成的适配器,而后者用来添加一个CPU外部的适配器。显然这里应该用前者。
ret = i2c_add_numbered_adapter(&i2c->adap);
if (ret < 0) {
dev_err(&pdev->dev, "failed to add bus to i2c core/n");
goto err_cpufreq;
}
platform_set_drvdata(pdev, i2c);
dev_info(&pdev->dev, "%s: S3C I2C adapter/n", dev_name(&i2c->adap.dev));
return 0;
err_cpufreq:
s3c24xx_i2c_deregister_cpufreq(i2c);
err_irq:
free_irq(i2c->irq, i2c);
err_iomap:
iounmap(i2c->regs);
err_ioarea:
release_resource(i2c->ioarea);
kfree(i2c->ioarea);
err_clk:
clk_disable(i2c->clk);
clk_put(i2c->clk);
err_noclk:
kfree(i2c);
return ret;
}
static int s3c24xx_i2c_probe(struct platform_device *pdev) { struct s3c24xx_i2c *i2c; struct s3c2410_platform_i2c *pdata; struct resource *res; int ret; pdata = pdev->dev.platform_data; if (!pdata) {dev_err(&pdev->dev, "no platform data/n"); return -EINVAL;}
//给s3c24xx_i2c结构体申请空间 i2c = kzalloc(sizeof(struct s3c24xx_i2c), GFP_KERNEL); if (!i2c) { dev_err(&pdev->dev, "no memory for state/n"); return -ENOMEM; } //填充s3c24xx_i2c结构体中各项,包括名称、所有者、算法、所属class等等 strlcpy(i2c->adap.name, "s3c2410-i2c", sizeof(i2c->adap.name));
i2c->adap.owner = THIS_MODULE; i2c->adap.algo = &s3c24xx_i2c_algorithm; //这个下面会重点介绍 i2c->adap.retries = 2; i2c->adap.class = I2C_CLASS_HWMON | I2C_CLASS_SPD; i2c->tx_setup = 50;spin_lock_init(&i2c->lock);init_waitqueue_head(&i2c->wait); /* find
the clock and enable it */ // 找到i2c始终并且使能它 i2c->dev = &pdev->dev; i2c->clk = clk_get(&pdev->dev, "i2c"); if (IS_ERR(i2c->clk)) {dev_err(&pdev->dev, "cannot get clock/n"); ret = -ENOENT; goto err_noclk; } dev_dbg(&pdev->dev, "clock source %p/n", i2c->clk);
clk_enable(i2c->clk); /* map the registers */ /*映射寄存器*/ res = platform_get_resource(pdev, IORESOURCE_MEM, 0); if (res == NULL) { dev_err(&pdev->dev, "cannot find IO resource/n");ret = -ENOENT; goto err_clk; } i2c->ioarea = request_mem_region(res->start,
resource_size(res), pdev->name); if (i2c->ioarea == NULL) {dev_err(&pdev->dev, "cannot request IO/n"); ret = -ENXIO; goto err_clk; } i2c->regs = ioremap(res->start, resource_size(res)); if (i2c->regs == NULL) { dev_err(&pdev->dev, "cannot map IO/n"); ret =
-ENXIO; goto err_ioarea; } dev_dbg(&pdev->dev, "registers %p (%p, %p)/n", i2c->regs, i2c->ioarea, res); /* setup info block for the i2c core */ i2c->adap.algo_data = i2c;i2c->adap.dev.parent = &pdev->dev; /* initialise the i2c controller */ /*s3c24xx_i2c结构体变量i2c的必要的信息都填充完了以后,开始进行初始化*/
ret = s3c24xx_i2c_init(i2c); if (ret != 0) goto err_iomap; /* find the IRQ for this unit (note, this relies on the init call to * ensure no current IRQs pending */ //接下来申请中断 i2c->irq = ret = platform_get_irq(pdev, 0); if (ret <= 0) {dev_err(&pdev->dev,
"cannot find IRQ/n"); goto err_iomap; } ret = request_irq(i2c->irq, s3c24xx_i2c_irq, IRQF_DISABLED, dev_name(&pdev->dev), i2c); if (ret != 0) {dev_err(&pdev->dev, "cannot claim IRQ %d/n", i2c->irq); goto err_iomap; } ret = s3c24xx_i2c_register_cpufreq(i2c);
if (ret < 0) { dev_err(&pdev->dev, "failed to register cpufreq notifier/n"); goto err_irq; } /* Note, previous versions of the driver used i2c_add_adapter() * to add the bus at any number. We now pass the bus number via * the platform data, so if unset it
will now default to always * being bus 0. */ i2c->adap.nr = pdata->bus_num; //看到了吧?下面调用了i2c-core中的i2c_add_adapter函数来添加一个i2c控制器 //i2c_add_numbered_adapter和i2c_add_adapter的区别在于前者用来添加一个在CPU内 //部集成的适配器,而后者用来添加一个CPU外部的适配器。显然这里应该用前者。 ret
= i2c_add_numbered_adapter(&i2c->adap); if (ret < 0) {dev_err(&pdev->dev, "failed to add bus to i2c core/n"); goto err_cpufreq; } platform_set_drvdata(pdev, i2c);dev_info(&pdev->dev, "%s: S3C I2C adapter/n", dev_name(&i2c->adap.dev)); return 0; err_cpufreq:s3c24xx_i2c_deregister_cpufreq(i2c);
err_irq: free_irq(i2c->irq, i2c); err_iomap: iounmap(i2c->regs); err_ioarea:release_resource(i2c->ioarea); kfree(i2c->ioarea); err_clk:clk_disable(i2c->clk); clk_put(i2c->clk); err_noclk: kfree(i2c);return ret; }
*remove函数
这是和probe相反的一个函数,在i2c_adap_s3c_exit时调用。主要功能是注销适配器,释放中断,释放内存区域,禁止始终等等。看到上边代码中的err_的各个部分了吧? remove是它们的汇总。
*suspend函数和resume函数
把这两个放一起说吧,挂起和恢复函数。挂起时保存状态并置标志位,恢复时重新初始化i2c适配器并置标志位。
Algorithm
哎呀我去,终于到这了。憋得我难受啊。这里要重点介绍一下,不仅要知其然,还要知其所以然,这样我们以后自己写驱动的时候就有把握了。
[c-sharp]
view plaincopyprint?
static
const
struct i2c_algorithm s3c24xx_i2c_algorithm = {
.master_xfer = s3c24xx_i2c_xfer,
.functionality = s3c24xx_i2c_func,
};
static const struct i2c_algorithm s3c24xx_i2c_algorithm = { .master_xfer= s3c24xx_i2c_xfer, .functionality = s3c24xx_i2c_func, };
这里实现的就是这个s3c24xx_i2c_xfer。这个是控制器能不能动作的关键,缺了这个,控制器就是废铜烂铁。
[c-sharp]
view plaincopyprint?
static
int s3c24xx_i2c_xfer(struct i2c_adapter *adap,
struct i2c_msg *msgs,
int num)
{
struct s3c24xx_i2c *i2c = (struct s3c24xx_i2c *)adap->algo_data;
int retry;
int ret;
for (retry = 0; retry < adap->retries; retry++) {
ret = s3c24xx_i2c_doxfer(i2c, msgs, num);
if (ret != -EAGAIN)
return ret;
dev_dbg(i2c->dev, "Retrying transmission (%d)/n", retry);
udelay(100);
}
return -EREMOTEIO;
}
static int s3c24xx_i2c_xfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num) { struct s3c24xx_i2c *i2c = (struct s3c24xx_i2c *)adap->algo_data; int retry; int ret; for (retry = 0; retry < adap->retries; retry++) { ret = s3c24xx_i2c_doxfer(i2c, msgs,
num);if (ret != -EAGAIN) return ret; dev_dbg(i2c->dev, "Retrying transmission (%d)/n", retry); udelay(100); } return -EREMOTEIO; }
完成任务的函数是s3c24xx_i2c_doxfer(),源码清单如下,
[c-sharp]
view plaincopyprint?
static
int s3c24xx_i2c_doxfer(struct s3c24xx_i2c *i2c,
struct i2c_msg *msgs,
int num)
{
unsigned long timeout;
int ret;
if (i2c->suspended)
return -EIO;
ret = s3c24xx_i2c_set_master(i2c);
if (ret != 0) {
dev_err(i2c->dev, "cannot get bus (error %d)/n", ret);
ret = -EAGAIN;
goto
out;
}
spin_lock_irq(&i2c->lock);
i2c->msg = msgs;
i2c->msg_num = num;
i2c->msg_ptr = 0;
i2c->msg_idx = 0;
i2c->state = STATE_START;
s3c24xx_i2c_enable_irq(i2c);
s3c24xx_i2c_message_start(i2c, msgs);
spin_unlock_irq(&i2c->lock);
timeout = wait_event_timeout(i2c->wait, i2c->msg_num == 0, HZ * 5);
ret = i2c->msg_idx;
/* having these next two as dev_err() makes life very
* noisy when doing an i2cdetect */
if (timeout == 0)
dev_dbg(i2c->dev, "timeout/n");
else
if (ret != num)
dev_dbg(i2c->dev, "incomplete xfer (%d)/n", ret);
/* ensure the stop has been through the bus */
msleep(1);
out:
return ret;
}
static int s3c24xx_i2c_doxfer(struct s3c24xx_i2c *i2c, struct i2c_msg *msgs, int num) { unsigned long timeout; int ret; if (i2c->suspended) return -EIO; ret = s3c24xx_i2c_set_master(i2c); if (ret != 0) { dev_err(i2c->dev, "cannot get bus (error %d)/n",
ret);ret = -EAGAIN; goto out; } spin_lock_irq(&i2c->lock);i2c->msg = msgs; i2c->msg_num = num; i2c->msg_ptr = 0;i2c->msg_idx = 0; i2c->state = STATE_START;s3c24xx_i2c_enable_irq(i2c); s3c24xx_i2c_message_start(i2c, msgs);spin_unlock_irq(&i2c->lock);
timeout = wait_event_timeout(i2c->wait, i2c->msg_num == 0, HZ * 5); ret = i2c->msg_idx; /* having these next two as dev_err() makes life very * noisy when doing an i2cdetect */ if (timeout == 0)dev_dbg(i2c->dev, "timeout/n"); else if (ret != num)dev_dbg(i2c->dev,
"incomplete xfer (%d)/n", ret); /* ensure the stop has been through the bus */ msleep(1); out: return ret; }
上面代码可以分成几个部分来看:
* s3c24xx_i2c_set_master() 这个函数每隔1ms查看一次i2c总线状态,timeout是400ms,如果在这期间总线状态不忙,则返回零。否则返回-ETIMEDOUT
* 将要发送的消息和其他信息付给i2c->msg和其他变量,并将状态设置为STATE_START
* s3c24xx_i2c_enable_irq() 使能中断
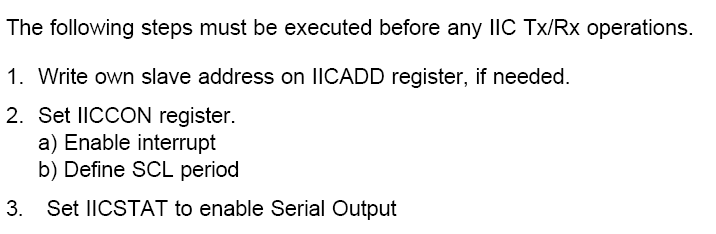
* s3c24xx_i2c_message_start() 重中之重啊。在看代码之前先来看看2440的datasheet上是怎么说的吧。
代码清单如下:
[c-sharp]
view plaincopyprint?
static
void s3c24xx_i2c_message_start(struct s3c24xx_i2c *i2c,
struct i2c_msg *msg)
{
unsigned int addr = (msg->addr & 0x7f) << 1;
unsigned long stat;
unsigned long iiccon;
stat = 0;
stat |= S3C2410_IICSTAT_TXRXEN;
if (msg->flags & I2C_M_RD) {//如果是read data, from slave to master stat |= S3C2410_IICSTAT_MASTER_RX;
addr |= 1;
} else
stat |= S3C2410_IICSTAT_MASTER_TX;
if (msg->flags & I2C_M_REV_DIR_ADDR)
addr ^= 1;
/* todo - check for wether ack wanted or not */
s3c24xx_i2c_enable_ack(i2c);
iiccon = readl(i2c->regs + S3C2410_IICCON);
writel(stat, i2c->regs + S3C2410_IICSTAT);
dev_dbg(i2c->dev, "START: %08lx to IICSTAT, %02x to DS/n", stat, addr);
writeb(addr, i2c->regs + S3C2410_IICDS);
/* delay here to ensure the data byte has gotten onto the bus
* before the transaction is started */
ndelay(i2c->tx_setup);
dev_dbg(i2c->dev, "iiccon, %08lx/n", iiccon);
writel(iiccon, i2c->regs + S3C2410_IICCON);
stat |= S3C2410_IICSTAT_START;
writel(stat, i2c->regs + S3C2410_IICSTAT);
}
http://blog.csdn.net/ypoflyer/article/details/6382097
先说一下,本文中有个疑惑,一直没有搞懂,写在这里,望高人指点一二,不胜感激!
#define I2C_M_NOSTART 0x4000 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_REV_DIR_ADDR 0x2000 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_IGNORE_NAK 0x1000 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_NO_RD_ACK 0x0800 /* if I2C_FUNC_PROTOCOL_MANGLING */
这里I2C_FUNC_PROTOCOL_MANGLING 是什么意思?为什么定义这些东东?看了注释也不太理解。求解释!
3. I2C总线驱动代码分析
s3c2440的总线驱动代码在i2c-s3c2410.c中。照例先从init看起。
[c-sharp]
view plaincopyprint?
static
int __init i2c_adap_s3c_init(void)
{
return platform_driver_register(&s3c24xx_i2c_driver);
}
static int __init i2c_adap_s3c_init(void) { return platform_driver_register(&s3c24xx_i2c_driver); }
在init中只是调用了平台驱动注册函数注册了一个i2c的平台驱动s3c24xx_i2c_driver。这个驱动是一个platform_driver的结构体变量。注意这里不是i2c_driver结构体,因为i2c_driver是对设备的驱动,而这里对控制器的驱动要使用platform_driver
[c-sharp]
view plaincopyprint?
static
struct platform_driver s3c24xx_i2c_driver = {
.probe = s3c24xx_i2c_probe,
.remove = s3c24xx_i2c_remove,
.suspend_late = s3c24xx_i2c_suspend_late,
.resume = s3c24xx_i2c_resume,
.id_table = s3c24xx_driver_ids,
.driver = {
.owner = THIS_MODULE,
.name = "s3c-i2c",
},
};
static struct platform_driver s3c24xx_i2c_driver = { .probe = s3c24xx_i2c_probe, .remove = s3c24xx_i2c_remove, .suspend_late = s3c24xx_i2c_suspend_late, .resume = s3c24xx_i2c_resume, .id_table = s3c24xx_driver_ids, .driver = { .owner = THIS_MODULE, .name =
"s3c-i2c", }, };
同样的,重要的函数还是那几个:probe,remove,suspend_late,resume。再加上一个id_table和device_driver结构体变量。
下面逐个分析:
* probe函数
当调用platform_driver_register函数注册platform_driver结构体时,probe指针指向的s3c24xx_i2c_probe函数将会被调用。这部分详细解释参考本博客另一篇文章《S3C2410看门狗驱动分析》。细心的朋友可能会发现,在s3c24xx_i2c_driver中,驱动的名字是"s3c-i2c",而在板文件中可以看到,设备的名字是"s3c2410-i2c",这两个名字不一样,那驱动和设备是如何match的呢?答案就在于id_table。这个id_table包含了驱动所支持的设备ID表。在match的时候,判断这个表中的名字是不是和设备一致,一致则match成功。这也是为什么一个驱动可以同时match成功多个设备的原因。如果只是靠platform_driver-->driver中的名字来匹配的话,那么驱动和设备只能是一对一的关系了。
[c-sharp]
view plaincopyprint?
static
struct platform_device_id s3c24xx_driver_ids[] = {
{
.name = "s3c2410-i2c",
.driver_data = TYPE_S3C2410,
}, {
.name = "s3c2440-i2c",
.driver_data = TYPE_S3C2440,
}, { },
};
static struct platform_device_id s3c24xx_driver_ids[] = { { .name = "s3c2410-i2c", .driver_data = TYPE_S3C2410, }, { .name = "s3c2440-i2c", .driver_data = TYPE_S3C2440, }, { }, };
扯远了,还是看看probe的代码吧~
[c-sharp]
view plaincopyprint?
static
int s3c24xx_i2c_probe(struct platform_device *pdev)
{
struct s3c24xx_i2c *i2c;
struct s3c2410_platform_i2c *pdata;
struct resource *res;
int ret;
pdata = pdev->dev.platform_data;
if (!pdata) {
dev_err(&pdev->dev, "no platform data/n");
return -EINVAL;
}
//给s3c24xx_i2c结构体申请空间
i2c = kzalloc(sizeof(struct s3c24xx_i2c), GFP_KERNEL);
if (!i2c) {
dev_err(&pdev->dev, "no memory for state/n");
return -ENOMEM;
}
//填充s3c24xx_i2c结构体中各项,包括名称、所有者、算法、所属class等等
strlcpy(i2c->adap.name, "s3c2410-i2c",
sizeof(i2c->adap.name));
i2c->adap.owner = THIS_MODULE;
i2c->adap.algo = &s3c24xx_i2c_algorithm; //这个下面会重点介绍
i2c->adap.retries = 2;
i2c->adap.class = I2C_CLASS_HWMON | I2C_CLASS_SPD;
i2c->tx_setup = 50;
spin_lock_init(&i2c->lock);
init_waitqueue_head(&i2c->wait);
/* find the clock and enable it */
// 找到i2c始终并且使能它
i2c->dev = &pdev->dev;
i2c->clk = clk_get(&pdev->dev, "i2c");
if (IS_ERR(i2c->clk)) {
dev_err(&pdev->dev, "cannot get clock/n");
ret = -ENOENT;
goto err_noclk;
}
dev_dbg(&pdev->dev, "clock source %p/n", i2c->clk);
clk_enable(i2c->clk);
/* map the registers */
/*映射寄存器*/
res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
if (res == NULL) {
dev_err(&pdev->dev, "cannot find IO resource/n");
ret = -ENOENT;
goto err_clk;
}
i2c->ioarea = request_mem_region(res->start, resource_size(res),
pdev->name);
if (i2c->ioarea == NULL) {
dev_err(&pdev->dev, "cannot request IO/n");
ret = -ENXIO;
goto err_clk;
}
i2c->regs = ioremap(res->start, resource_size(res));
if (i2c->regs == NULL) {
dev_err(&pdev->dev, "cannot map IO/n");
ret = -ENXIO;
goto err_ioarea;
}
dev_dbg(&pdev->dev, "registers %p (%p, %p)/n",
i2c->regs, i2c->ioarea, res);
/* setup info block for the i2c core */
i2c->adap.algo_data = i2c;
i2c->adap.dev.parent = &pdev->dev;
/* initialise the i2c controller */
/*s3c24xx_i2c结构体变量i2c的必要的信息都填充完了以后,开始进行初始化*/
ret = s3c24xx_i2c_init(i2c);
if (ret != 0)
goto err_iomap;
/* find the IRQ for this unit (note, this relies on the init call to
* ensure no current IRQs pending
*/
//接下来申请中断
i2c->irq = ret = platform_get_irq(pdev, 0);
if (ret <= 0) {
dev_err(&pdev->dev, "cannot find IRQ/n");
goto err_iomap;
}
ret = request_irq(i2c->irq, s3c24xx_i2c_irq, IRQF_DISABLED,
dev_name(&pdev->dev), i2c);
if (ret != 0) {
dev_err(&pdev->dev, "cannot claim IRQ %d/n", i2c->irq);
goto err_iomap;
}
ret = s3c24xx_i2c_register_cpufreq(i2c);
if (ret < 0) {
dev_err(&pdev->dev, "failed to register cpufreq notifier/n");
goto err_irq;
}
/* Note, previous versions of the driver used i2c_add_adapter()
* to add the bus at any number. We now pass the bus number via
* the platform data, so if unset it will now default to always
* being bus 0.
*/
i2c->adap.nr = pdata->bus_num;
//看到了吧?下面调用了i2c-core中的i2c_add_adapter函数来添加一个i2c控制器
//i2c_add_numbered_adapter和i2c_add_adapter的区别在于前者用来添加一个在CPU内
//部集成的适配器,而后者用来添加一个CPU外部的适配器。显然这里应该用前者。
ret = i2c_add_numbered_adapter(&i2c->adap);
if (ret < 0) {
dev_err(&pdev->dev, "failed to add bus to i2c core/n");
goto err_cpufreq;
}
platform_set_drvdata(pdev, i2c);
dev_info(&pdev->dev, "%s: S3C I2C adapter/n", dev_name(&i2c->adap.dev));
return 0;
err_cpufreq:
s3c24xx_i2c_deregister_cpufreq(i2c);
err_irq:
free_irq(i2c->irq, i2c);
err_iomap:
iounmap(i2c->regs);
err_ioarea:
release_resource(i2c->ioarea);
kfree(i2c->ioarea);
err_clk:
clk_disable(i2c->clk);
clk_put(i2c->clk);
err_noclk:
kfree(i2c);
return ret;
}
static int s3c24xx_i2c_probe(struct platform_device *pdev) { struct s3c24xx_i2c *i2c; struct s3c2410_platform_i2c *pdata; struct resource *res; int ret; pdata = pdev->dev.platform_data; if (!pdata) {dev_err(&pdev->dev, "no platform data/n"); return -EINVAL;}
//给s3c24xx_i2c结构体申请空间 i2c = kzalloc(sizeof(struct s3c24xx_i2c), GFP_KERNEL); if (!i2c) { dev_err(&pdev->dev, "no memory for state/n"); return -ENOMEM; } //填充s3c24xx_i2c结构体中各项,包括名称、所有者、算法、所属class等等 strlcpy(i2c->adap.name, "s3c2410-i2c", sizeof(i2c->adap.name));
i2c->adap.owner = THIS_MODULE; i2c->adap.algo = &s3c24xx_i2c_algorithm; //这个下面会重点介绍 i2c->adap.retries = 2; i2c->adap.class = I2C_CLASS_HWMON | I2C_CLASS_SPD; i2c->tx_setup = 50;spin_lock_init(&i2c->lock);init_waitqueue_head(&i2c->wait); /* find
the clock and enable it */ // 找到i2c始终并且使能它 i2c->dev = &pdev->dev; i2c->clk = clk_get(&pdev->dev, "i2c"); if (IS_ERR(i2c->clk)) {dev_err(&pdev->dev, "cannot get clock/n"); ret = -ENOENT; goto err_noclk; } dev_dbg(&pdev->dev, "clock source %p/n", i2c->clk);
clk_enable(i2c->clk); /* map the registers */ /*映射寄存器*/ res = platform_get_resource(pdev, IORESOURCE_MEM, 0); if (res == NULL) { dev_err(&pdev->dev, "cannot find IO resource/n");ret = -ENOENT; goto err_clk; } i2c->ioarea = request_mem_region(res->start,
resource_size(res), pdev->name); if (i2c->ioarea == NULL) {dev_err(&pdev->dev, "cannot request IO/n"); ret = -ENXIO; goto err_clk; } i2c->regs = ioremap(res->start, resource_size(res)); if (i2c->regs == NULL) { dev_err(&pdev->dev, "cannot map IO/n"); ret =
-ENXIO; goto err_ioarea; } dev_dbg(&pdev->dev, "registers %p (%p, %p)/n", i2c->regs, i2c->ioarea, res); /* setup info block for the i2c core */ i2c->adap.algo_data = i2c;i2c->adap.dev.parent = &pdev->dev; /* initialise the i2c controller */ /*s3c24xx_i2c结构体变量i2c的必要的信息都填充完了以后,开始进行初始化*/
ret = s3c24xx_i2c_init(i2c); if (ret != 0) goto err_iomap; /* find the IRQ for this unit (note, this relies on the init call to * ensure no current IRQs pending */ //接下来申请中断 i2c->irq = ret = platform_get_irq(pdev, 0); if (ret <= 0) {dev_err(&pdev->dev,
"cannot find IRQ/n"); goto err_iomap; } ret = request_irq(i2c->irq, s3c24xx_i2c_irq, IRQF_DISABLED, dev_name(&pdev->dev), i2c); if (ret != 0) {dev_err(&pdev->dev, "cannot claim IRQ %d/n", i2c->irq); goto err_iomap; } ret = s3c24xx_i2c_register_cpufreq(i2c);
if (ret < 0) { dev_err(&pdev->dev, "failed to register cpufreq notifier/n"); goto err_irq; } /* Note, previous versions of the driver used i2c_add_adapter() * to add the bus at any number. We now pass the bus number via * the platform data, so if unset it
will now default to always * being bus 0. */ i2c->adap.nr = pdata->bus_num; //看到了吧?下面调用了i2c-core中的i2c_add_adapter函数来添加一个i2c控制器 //i2c_add_numbered_adapter和i2c_add_adapter的区别在于前者用来添加一个在CPU内 //部集成的适配器,而后者用来添加一个CPU外部的适配器。显然这里应该用前者。 ret
= i2c_add_numbered_adapter(&i2c->adap); if (ret < 0) {dev_err(&pdev->dev, "failed to add bus to i2c core/n"); goto err_cpufreq; } platform_set_drvdata(pdev, i2c);dev_info(&pdev->dev, "%s: S3C I2C adapter/n", dev_name(&i2c->adap.dev)); return 0; err_cpufreq:s3c24xx_i2c_deregister_cpufreq(i2c);
err_irq: free_irq(i2c->irq, i2c); err_iomap: iounmap(i2c->regs); err_ioarea:release_resource(i2c->ioarea); kfree(i2c->ioarea); err_clk:clk_disable(i2c->clk); clk_put(i2c->clk); err_noclk: kfree(i2c);return ret; }
*remove函数
这是和probe相反的一个函数,在i2c_adap_s3c_exit时调用。主要功能是注销适配器,释放中断,释放内存区域,禁止始终等等。看到上边代码中的err_的各个部分了吧? remove是它们的汇总。
*suspend函数和resume函数
把这两个放一起说吧,挂起和恢复函数。挂起时保存状态并置标志位,恢复时重新初始化i2c适配器并置标志位。
Algorithm
哎呀我去,终于到这了。憋得我难受啊。这里要重点介绍一下,不仅要知其然,还要知其所以然,这样我们以后自己写驱动的时候就有把握了。
[c-sharp]
view plaincopyprint?
static
const
struct i2c_algorithm s3c24xx_i2c_algorithm = {
.master_xfer = s3c24xx_i2c_xfer,
.functionality = s3c24xx_i2c_func,
};
static const struct i2c_algorithm s3c24xx_i2c_algorithm = { .master_xfer= s3c24xx_i2c_xfer, .functionality = s3c24xx_i2c_func, };
这里实现的就是这个s3c24xx_i2c_xfer。这个是控制器能不能动作的关键,缺了这个,控制器就是废铜烂铁。
[c-sharp]
view plaincopyprint?
static
int s3c24xx_i2c_xfer(struct i2c_adapter *adap,
struct i2c_msg *msgs,
int num)
{
struct s3c24xx_i2c *i2c = (struct s3c24xx_i2c *)adap->algo_data;
int retry;
int ret;
for (retry = 0; retry < adap->retries; retry++) {
ret = s3c24xx_i2c_doxfer(i2c, msgs, num);
if (ret != -EAGAIN)
return ret;
dev_dbg(i2c->dev, "Retrying transmission (%d)/n", retry);
udelay(100);
}
return -EREMOTEIO;
}
static int s3c24xx_i2c_xfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num) { struct s3c24xx_i2c *i2c = (struct s3c24xx_i2c *)adap->algo_data; int retry; int ret; for (retry = 0; retry < adap->retries; retry++) { ret = s3c24xx_i2c_doxfer(i2c, msgs,
num);if (ret != -EAGAIN) return ret; dev_dbg(i2c->dev, "Retrying transmission (%d)/n", retry); udelay(100); } return -EREMOTEIO; }
完成任务的函数是s3c24xx_i2c_doxfer(),源码清单如下,
[c-sharp]
view plaincopyprint?
static
int s3c24xx_i2c_doxfer(struct s3c24xx_i2c *i2c,
struct i2c_msg *msgs,
int num)
{
unsigned long timeout;
int ret;
if (i2c->suspended)
return -EIO;
ret = s3c24xx_i2c_set_master(i2c);
if (ret != 0) {
dev_err(i2c->dev, "cannot get bus (error %d)/n", ret);
ret = -EAGAIN;
goto
out;
}
spin_lock_irq(&i2c->lock);
i2c->msg = msgs;
i2c->msg_num = num;
i2c->msg_ptr = 0;
i2c->msg_idx = 0;
i2c->state = STATE_START;
s3c24xx_i2c_enable_irq(i2c);
s3c24xx_i2c_message_start(i2c, msgs);
spin_unlock_irq(&i2c->lock);
timeout = wait_event_timeout(i2c->wait, i2c->msg_num == 0, HZ * 5);
ret = i2c->msg_idx;
/* having these next two as dev_err() makes life very
* noisy when doing an i2cdetect */
if (timeout == 0)
dev_dbg(i2c->dev, "timeout/n");
else
if (ret != num)
dev_dbg(i2c->dev, "incomplete xfer (%d)/n", ret);
/* ensure the stop has been through the bus */
msleep(1);
out:
return ret;
}
static int s3c24xx_i2c_doxfer(struct s3c24xx_i2c *i2c, struct i2c_msg *msgs, int num) { unsigned long timeout; int ret; if (i2c->suspended) return -EIO; ret = s3c24xx_i2c_set_master(i2c); if (ret != 0) { dev_err(i2c->dev, "cannot get bus (error %d)/n",
ret);ret = -EAGAIN; goto out; } spin_lock_irq(&i2c->lock);i2c->msg = msgs; i2c->msg_num = num; i2c->msg_ptr = 0;i2c->msg_idx = 0; i2c->state = STATE_START;s3c24xx_i2c_enable_irq(i2c); s3c24xx_i2c_message_start(i2c, msgs);spin_unlock_irq(&i2c->lock);
timeout = wait_event_timeout(i2c->wait, i2c->msg_num == 0, HZ * 5); ret = i2c->msg_idx; /* having these next two as dev_err() makes life very * noisy when doing an i2cdetect */ if (timeout == 0)dev_dbg(i2c->dev, "timeout/n"); else if (ret != num)dev_dbg(i2c->dev,
"incomplete xfer (%d)/n", ret); /* ensure the stop has been through the bus */ msleep(1); out: return ret; }
上面代码可以分成几个部分来看:
* s3c24xx_i2c_set_master() 这个函数每隔1ms查看一次i2c总线状态,timeout是400ms,如果在这期间总线状态不忙,则返回零。否则返回-ETIMEDOUT
* 将要发送的消息和其他信息付给i2c->msg和其他变量,并将状态设置为STATE_START
* s3c24xx_i2c_enable_irq() 使能中断
* s3c24xx_i2c_message_start() 重中之重啊。在看代码之前先来看看2440的datasheet上是怎么说的吧。
代码清单如下:
[c-sharp]
view plaincopyprint?
static
void s3c24xx_i2c_message_start(struct s3c24xx_i2c *i2c,
struct i2c_msg *msg)
{
unsigned int addr = (msg->addr & 0x7f) << 1;
unsigned long stat;
unsigned long iiccon;
stat = 0;
stat |= S3C2410_IICSTAT_TXRXEN;
if (msg->flags & I2C_M_RD) {//如果是read data, from slave to master stat |= S3C2410_IICSTAT_MASTER_RX;
addr |= 1;
} else
stat |= S3C2410_IICSTAT_MASTER_TX;
if (msg->flags & I2C_M_REV_DIR_ADDR)
addr ^= 1;
/* todo - check for wether ack wanted or not */
s3c24xx_i2c_enable_ack(i2c);
iiccon = readl(i2c->regs + S3C2410_IICCON);
writel(stat, i2c->regs + S3C2410_IICSTAT);
dev_dbg(i2c->dev, "START: %08lx to IICSTAT, %02x to DS/n", stat, addr);
writeb(addr, i2c->regs + S3C2410_IICDS);
/* delay here to ensure the data byte has gotten onto the bus
* before the transaction is started */
ndelay(i2c->tx_setup);
dev_dbg(i2c->dev, "iiccon, %08lx/n", iiccon);
writel(iiccon, i2c->regs + S3C2410_IICCON);
stat |= S3C2410_IICSTAT_START;
writel(stat, i2c->regs + S3C2410_IICSTAT);
}
http://blog.csdn.net/ypoflyer/article/details/6382097

相关文章推荐
- Linux I2C驱动完全分析(一)
- Linux I2C驱动完全分析(二)
- Linux I2C驱动完全分析(二)
- Linux I2C驱动完全分析(一)
- Linux I2C驱动完全分析(一)
- Linux I2C驱动完全分析
- Linux I2C驱动完全分析(二)
- Linux I2C驱动完全分析
- Linux I2C驱动完全分析(一)
- Linux I2C驱动完全分析(一)
- Linux I2C驱动完全分析(一)
- Linux I2C驱动完全分析
- Linux I2C驱动完全分析(一)
- Linux I2C驱动完全分析(一)
- Linux I2C驱动完全分析(二)
- Linux I2C驱动完全分析(二)
- linux I2C驱动分析整理
- 【驱动】linux下I2C驱动架构全面分析
- Linux设备驱动之I2C架构分析
- Linux I2C驱动分析 S3C6410