[数字信号处理]IIR滤波器的直接设计(C代码)
2013-06-11 18:18
501 查看
1.IIR滤波器的直接设计原理
不利用模拟滤波器,直接进行数字滤波器的设计的方法,称为直接设计。回忆之前所说的IIR滤波器的直接设计,我们首先设计了巴特沃斯模拟滤波器,然后进行双线性变换,得到数字滤波器。我所使用的是巴特沃斯低通滤波器作为原型滤波器,其振幅特性如下所示。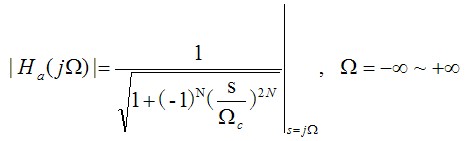
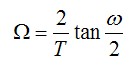
首先,我们先把数字滤波器的指标,根据下式转为模拟滤波器的指标。
然后根据模拟滤波器的设计指标,计算次数N,然后计算极点,最后选择出稳定的极点,计算模拟滤波器的传递函数。然后,我们通过拉普拉斯反变换,再使用差分替代微分,得到了S平面-Z平面的对应关系,将其转为数字滤波器。
详细的,戳链接 ---------[数字信号处理]IIR滤波器的间接设计(C代码)
现在,我们将这个过程,稍微调整一下。
1.1 巴特沃斯低通数字滤波器的设计
首先,转换指标的公式,直接带入巴特沃斯低通模拟滤波器的振幅特性表达式,然后化简,我们可以得到一个新的振幅特性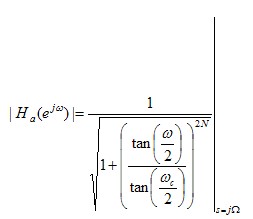
同样的,这个振幅特性具有巴特沃斯低通模拟滤波器的一些特性。函数为单调递减的,通带与阻带都没有纹波。这个新的滤波器,称为巴特沃斯低通数字滤波器。
与之前一样的,我们的首先先确定所需要的滤波器的次数N,根据次数计算出极点,选择稳定的极点来计算出传递函数,然后就可以得到滤波器的系数了。
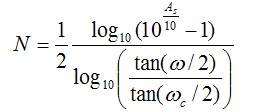
首先是次数的计算,次数的计算,还是要根据阻带衰减指标,根据下式计算。

将巴特沃斯低通数字滤波器的振幅特性带入,我们就可以计算出所需要的滤波器的次数N。
下一步,我们是需要计算极点。这里与之前的间接设计不同,我们需要做一些变形。首先,将其振幅特性做平方,变为

然后,把

部分稍微做下变形,
然后,将

替换为Z,带入,则得到了如下式子

通过这个式子,就可以很方便的计算极点与零点。很容易的能看出,这个滤波器的零点是-1,并且为N重极点(这里是振幅特性的平方所以不是2N)。此时,分母多项式为
由于一步解开很麻烦,我们先将这个式子,关于

解开,我们可以得到如下解,

再解z,然后再我们就可以得到极点了,如下所示。
这里所求得的极点为2N个,为了所设计的滤波器是稳定的,我们需要选择出稳定的极点。在Z平面内,其摸小于1的极点,就是稳定的极点。或者来说,只要滤波器的所有极点均在Z平面的单位圆里,那么,这个滤波器就是稳定的。(题外话,由于FIR滤波器的极点全是0,故FIR滤波器无需考虑稳定性。因为FIR滤波器必定稳定。)
最后,将极点带入传递函数的公式,就可以得到滤波器的系数了。
这里的K可以根据下式去求,
到此,我们就设计出了一个IIR数字滤波器。
1.1 巴特沃斯低通数字滤波器设计的实现(C语言)
首先,还是次数的计算。代码如下N = Ceil(0.5*( log10 ( pow (10, IIR_Filter.Stopband_attenuation/10) - 1) / log10 (IIR_Filter.Stopband/IIR_Filter.Cotoff)));
然后,是为了计算极点

,我们先计算

。这里,将指数函数换为了三角函数。
poles_1.Real_part = (0.5)*Cotoff*cos((k+dk)*(pi/N)); poles_1.Imag_Part= (0.5)*Cotoff*sin((k+dk)*(pi/N));
计算出
之后,我们计算极点
,然后选择稳定的极点。
for(k = 0;k <= ((2*N)-1) ; k++)
{
poles_1.Real_part = (0.5)*Cotoff*cos((k+dk)*(pi/N));
poles_1.Imag_Part= (0.5)*Cotoff*sin((k+dk)*(pi/N));
poles_2.Real_part = 1 - poles_1.Real_part ;
poles_2.Imag_Part= -poles_1.Imag_Part;
poles_1.Real_part = poles_1.Real_part + 1;
poles_1.Real_part = poles_1.Real_part;
Complex_Division(poles_1,poles_2,
&poles[count].Real_part,
&poles[count].Imag_Part);
if(Complex_Abs(poles[count])<1)
{
poles[count].Real_part = -poles[count].Real_part;
poles[count].Imag_Part= -poles[count].Imag_Part;
count++;
if (count == N) break;
}
} 这里的计算,用到了复数的乘法与绝对值。int Complex_Division(COMPLEX a,COMPLEX b,
double *Res_Real,double *Res_Imag)
{
*(Res_Real) = ((a.Real_part)*(b.Real_part) + (a.Imag_Part)*(b.Imag_Part))/
((b.Real_part)*(b.Real_part) + (b.Imag_Part)*(b.Imag_Part));
*(Res_Imag)= ((a.Real_part)*(b.Imag_Part) - (a.Imag_Part)*(b.Real_part))/
((b.Real_part)*(b.Real_part) + (b.Imag_Part)*(b.Imag_Part));
return (int)1;
}
double Complex_Abs(COMPLEX a)
{
return (double)(sqrt((a.Real_part)*(a.Real_part) + (a.Imag_Part)*(a.Imag_Part)));
} 还有就是K的计算。double K_z = 0.0;
for(count = 0;count <= N;count++) {K_z += *(az+count);}
K_z = (K_z/pow ((double)2,N)); 最后,使用之前在IIR的间接设计的乘开算法,我们就可以得到一个模拟滤波器的系数了。2.IIR滤波器的直接设计代码(C语言)
#include <stdio.h>
#include <math.h>
#include <malloc.h>
#include <string.h>
#define pi ((double)3.1415926)
typedef struct
{
double Real_part;
double Imag_Part;
} COMPLEX;
struct DESIGN_SPECIFICATION
{
double Cotoff;
double Stopband;
double Stopband_attenuation;
};
int Ceil(double input)
{
if(input != (double)((int)input)) return ((int)input) +1;
else return ((int)input);
}
int Complex_Multiple(COMPLEX a,COMPLEX b,
double *Res_Real,double *Res_Imag)
{
*(Res_Real) = (a.Real_part)*(b.Real_part) - (a.Imag_Part)*(b.Imag_Part);
*(Res_Imag)= (a.Imag_Part)*(b.Real_part) + (a.Real_part)*(b.Imag_Part);
return (int)1;
}
int Complex_Division(COMPLEX a,COMPLEX b,
double *Res_Real,double *Res_Imag)
{
*(Res_Real) = ((a.Real_part)*(b.Real_part) + (a.Imag_Part)*(b.Imag_Part))/
((b.Real_part)*(b.Real_part) + (b.Imag_Part)*(b.Imag_Part));
*(Res_Imag)= ((a.Real_part)*(b.Imag_Part) - (a.Imag_Part)*(b.Real_part))/
((b.Real_part)*(b.Real_part) + (b.Imag_Part)*(b.Imag_Part));
return (int)1;
}
double Complex_Abs(COMPLEX a)
{
return (double)(sqrt((a.Real_part)*(a.Real_part) + (a.Imag_Part)*(a.Imag_Part)));
}
double IIRFilter (double *a, int Lenth_a,
double *b, int Lenth_b,
double Input_Data,
double *Memory_Buffer)
{
int Count;
double Output_Data = 0;
int Memory_Lenth = 0;
if(Lenth_a >= Lenth_b) Memory_Lenth = Lenth_a;
else Memory_Lenth = Lenth_b;
Output_Data += (*a) * Input_Data; //a(0)*x(n)
for(Count = 1; Count < Lenth_a ;Count++)
{
Output_Data -= (*(a + Count)) *
(*(Memory_Buffer + (Memory_Lenth - 1) - Count));
}
//------------------------save data--------------------------//
*(Memory_Buffer + Memory_Lenth - 1) = Output_Data;
Output_Data = 0;
//----------------------------------------------------------//
for(Count = 0; Count < Lenth_b ;Count++)
{
Output_Data += (*(b + Count)) *
(*(Memory_Buffer + (Memory_Lenth - 1) - Count));
}
//------------------------move data--------------------------//
for(Count = 0 ; Count < Memory_Lenth -1 ; Count++)
{
*(Memory_Buffer + Count) = *(Memory_Buffer + Count + 1);
}
*(Memory_Buffer + Memory_Lenth - 1) = 0;
//-----------------------------------------------------------//
return (double)Output_Data;
}
int Direct( double Cotoff,
double Stopband,
double Stopband_attenuation,
int N,
double *az,double *bz)
{
printf("Wc = %lf [rad/sec] \n" ,Cotoff);
printf("Ws = %lf [rad/sec] \n" ,Stopband);
printf("As = %lf [dB] \n" ,Stopband_attenuation);
printf("--------------------------------------------------------\n" );
printf("N: %d \n" ,N);
printf("--------------------------------------------------------\n" );
COMPLEX poles
,poles_1,poles_2;
double dk = 0;
int k = 0;
int count = 0,count_1 = 0;;
if((N%2) == 0) dk = 0.5;
else dk = 0;
for(k = 0;k <= ((2*N)-1) ; k++)
{
poles_1.Real_part = (0.5)*Cotoff*cos((k+dk)*(pi/N));
poles_1.Imag_Part= (0.5)*Cotoff*sin((k+dk)*(pi/N));
poles_2.Real_part = 1 - poles_1.Real_part ;
poles_2.Imag_Part= -poles_1.Imag_Part;
poles_1.Real_part = poles_1.Real_part + 1;
poles_1.Real_part = poles_1.Real_part;
Complex_Division(poles_1,poles_2,
&poles[count].Real_part,
&poles[count].Imag_Part);
if(Complex_Abs(poles[count])<1)
{
poles[count].Real_part = -poles[count].Real_part;
poles[count].Imag_Part= -poles[count].Imag_Part;
count++;
if (count == N) break;
}
}
printf("pk = \n" );
for(count = 0;count < N ;count++)
{
printf("(%lf) + (%lf i) \n" ,-poles[count].Real_part
,-poles[count].Imag_Part);
}
printf("--------------------------------------------------------\n" );
COMPLEX Res[N+1],Res_Save[N+1];
Res[0].Real_part = poles[0].Real_part;
Res[0].Imag_Part= poles[0].Imag_Part;
Res[1].Real_part = 1;
Res[1].Imag_Part= 0;
for(count_1 = 0;count_1 < N-1;count_1++)
{
for(count = 0;count <= count_1 + 2;count++)
{
if(0 == count)
{
Complex_Multiple(Res[count], poles[count_1+1],
&(Res_Save[count].Real_part),
&(Res_Save[count].Imag_Part));
}
else if((count_1 + 2) == count)
{
Res_Save[count].Real_part += Res[count - 1].Real_part;
Res_Save[count].Imag_Part += Res[count - 1].Imag_Part;
}
else
{
Complex_Multiple(Res[count], poles[count_1+1],
&(Res_Save[count].Real_part),
&(Res_Save[count].Imag_Part));
Res_Save[count].Real_part += Res[count - 1].Real_part;
Res_Save[count].Imag_Part += Res[count - 1].Imag_Part;
}
}
for(count = 0;count <= N;count++)
{
Res[count].Real_part = Res_Save[count].Real_part;
Res[count].Imag_Part= Res_Save[count].Imag_Part;
*(az + N - count) = Res[count].Real_part;
}
}
double K_z = 0.0; for(count = 0;count <= N;count++) {K_z += *(az+count);} K_z = (K_z/pow ((double)2,N));
printf("K = %lf \n" , K_z);
for(count = 0;count <= N;count++)
{
Res[count].Real_part = 0;
Res[count].Imag_Part= 0;
Res_Save[count].Real_part = 0;
Res_Save[count].Imag_Part= 0;
}
COMPLEX zero;
zero.Real_part = 1;
zero.Imag_Part = 0;
Res[0].Real_part = 1;
Res[0].Imag_Part= 0;
Res[1].Real_part = 1;
Res[1].Imag_Part= 0;
for(count_1 = 0;count_1 < N-1;count_1++)
{
for(count = 0;count <= count_1 + 2;count++)
{
if(0 == count)
{
Complex_Multiple(Res[count], zero,
&(Res_Save[count].Real_part),
&(Res_Save[count].Imag_Part));
}
else if((count_1 + 2) == count)
{
Res_Save[count].Real_part += Res[count - 1].Real_part;
Res_Save[count].Imag_Part += Res[count - 1].Imag_Part;
}
else
{
Complex_Multiple(Res[count],zero,
&(Res_Save[count].Real_part),
&(Res_Save[count].Imag_Part));
Res_Save[count].Real_part += Res[count - 1].Real_part;
Res_Save[count].Imag_Part += Res[count - 1].Imag_Part;
}
}
for(count = 0;count <= N;count++)
{
Res[count].Real_part = Res_Save[count].Real_part;
Res[count].Imag_Part= Res_Save[count].Imag_Part;
*(bz + N - count) = Res[count].Real_part;
}
}
for(count = 0;count <= N;count++)
{
*(bz + N - count) = *(bz + N - count) * K_z;
}
//------------------------display---------------------------------//
printf("bz = [" );
for(count= 0;count <= N ;count++)
{
printf("%lf ", *(bz+count));
}
printf(" ] \n" );
printf("az = [" );
for(count= 0;count <= N ;count++)
{
printf("%lf ", *(az+count));
}
printf(" ] \n" );
printf("--------------------------------------------------------\n" );
return (int)1;
}
int main(void)
{
int count;
struct DESIGN_SPECIFICATION IIR_Filter;
IIR_Filter.Cotoff = (double)(pi/4); //[red]
IIR_Filter.Stopband = (double)((pi*3)/4); //[red]
IIR_Filter.Stopband_attenuation = 30; //[dB]
int N;
IIR_Filter.Cotoff = 2 * tan((IIR_Filter.Cotoff)/2); //[red/sec]
IIR_Filter.Stopband = 2 * tan((IIR_Filter.Stopband)/2); //[red/sec]
N = Ceil(0.5*( log10 ( pow (10, IIR_Filter.Stopband_attenuation/10) - 1) / log10 (IIR_Filter.Stopband/IIR_Filter.Cotoff)));
double az[N+1] , bz[N+1];
Direct(IIR_Filter.Cotoff,
IIR_Filter.Stopband,
IIR_Filter.Stopband_attenuation,
N,
az,bz);
double *Memory_Buffer;
Memory_Buffer = (double *) malloc(sizeof(double)*(N+1));
memset(Memory_Buffer,
0,
sizeof(double)*(N+1));
FILE* Input_Data;
FILE* Output_Data;
double Input = 0 ;
double Output = 0;
Input_Data = fopen("input.dat","r");
Output_Data = fopen("output.txt","w");
while(1)
{
if(fscanf(Input_Data, "%lf", &Input) == EOF) break;
Output = IIRFilter( az, (N+1),
bz, (N+1),
Input,
Memory_Buffer );
fprintf(Output_Data,"%lf,",Output);
}
printf("Finish \n" );
return (int)0;
}
3.IIR滤波器的直接设计(例)
3.1 设计指标
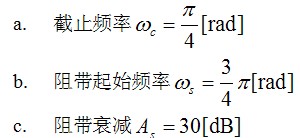
3.2 程序执行结果
根据之前所说的原理,使用前面的程序,我们可以得到满足设计指标的IIR滤波器的参数。程序在gcc下编译通过,执行结果如下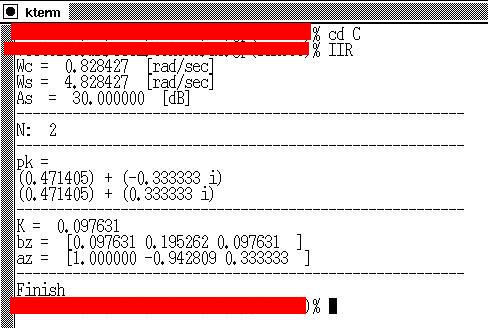
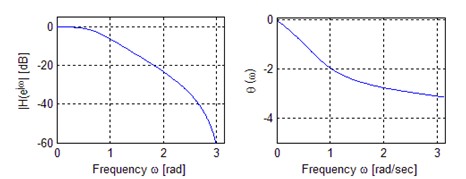
3.3设计出来的IIR滤波器的频响
3.4实际滤波效果
首先,设定采样频率为10kHz,计算出如下非正规化频率
我们的为验证滤波器的性能,其输入信号确定为0.5kHz与4kHz的正弦叠加信号,如下。
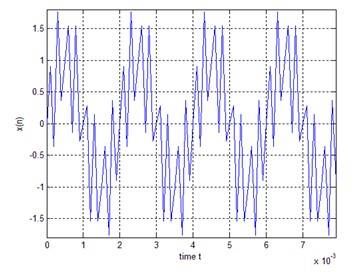
其理想的输出为0.5kHz正弦信号,实际输出为下。
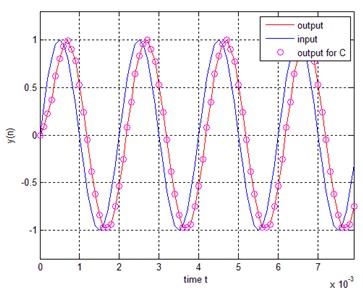
其中,红色的----是Matlab计算的输出,粉色的o是用C语言计算的输出,蓝色的线是理想输出(也就是混合前的0.5kHz信号)。
博客地址:http://blog.csdn.net/thnh169/
到此,我们就实现了一个IIR滤波器。

相关文章推荐
- [数字信号处理]IIR滤波器的直接设计(C代码)
- [数字信号处理]IIR滤波器的间接设计(C代码)
- [数字信号处理]IIR滤波器的间接设计(C代码)
- [数字信号处理]IIR滤波器的间接设计(C代码)
- 基于模型设计的FPGA开发与实现:滤波器设计与实现(三)Matlab中滤波器的HDL代码生成
- 基于java的滤波器设计(IIR)
- IIR滤波器设计(调用MATLAB IIR函数来实现)
- IIR滤波器设计
- [数字信号处理]IIR滤波器基础
- fdatool 设计IIR滤波器
- 使用matlab工具箱设计IIR滤波器(巴特沃斯)
- eclipse下如何直接做JSP代码设计
- 转载 iir直接i型和直接ii型滤波器
- 利用 SCILAB 设计 iir 滤波器设计(模拟滤波器双线性变换法)
- 利用 SCILAB 设计 iir 滤波器设计(模拟滤波器双线性变换法)
- 滤波器的设计(低通、带通、高通)的matalb代码
- [数字信号处理]IIR滤波器基础
- 基于FPGA与MATLAB的IIR滤波器设计与实现
- IIR滤波器间接设计