linux下bluetooth编程(四)L2CAP层编程
2013-05-20 19:09
405 查看
一:L2CAP协议简介:
Logical Link Control and Adaptation Protocol(L2CAP)
逻辑连接控制和适配协议(L2CAP) 为上层协议提供面向连接和无连接的数据服务,并提供多协议功能和分割重组操作。L2CAP充许上层协议和应用软件传输和接收最大长度为 64K的 L2CAP数据包。
L2CAP基于 通道(channel)的概念。 通道 (Channel)是位于基带 (baseband)连接之上的逻辑连接。每个通道以多对一的方式绑定一个单一协议 (single protocol)。多个通道可以绑定同一个协议,但一个通道不可以绑定多个协议。每个在通道里接收到的 L2CAP数据包被传到相应的上层协议。 多个通道可共享同一个基带连接。
L2CAP处于Bluetooth协议栈的位置如下:
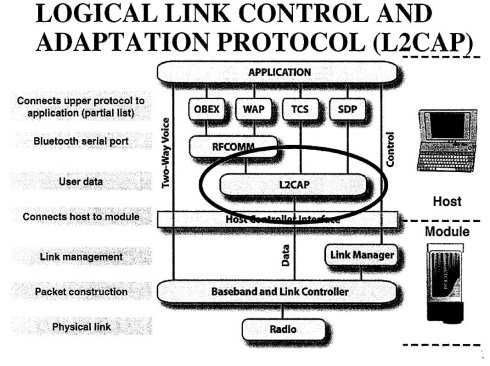
也就是说,所有L2CAP数据均通过HCI传输到Remote Device。且上层协议的数据,大都也通过L2CAP来传送。
L2CAP可以发送Command。例如连接,断连等等。
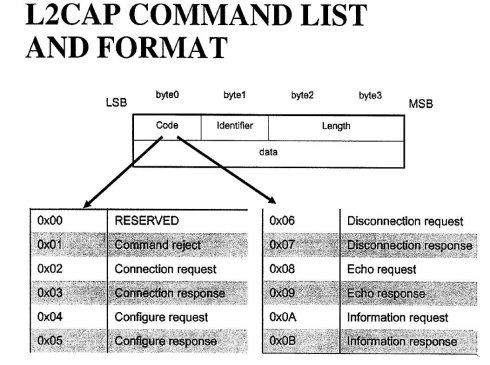
下面看Command例子:Connection Request:
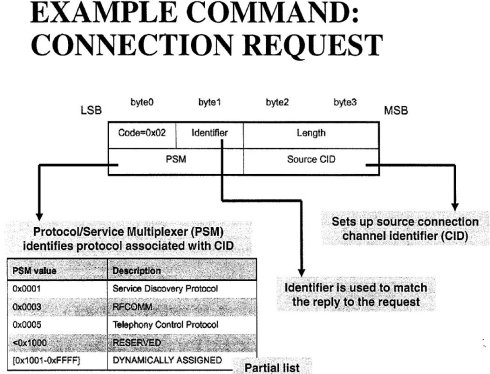
其中PSM比较需要注意,L2CAP 使用L2CAP连接请求(Connection Request )命令中的PSM字段实现协议复用。L2CAP可以复用发给上层协议的连接请求,这些上层协议包括服务发现协议SDP(PSM = 0x0001)、RFCOMM(PSM = 0x0003)和电话控制(PSM = 0x0005)等。
二:L2CAP编程方法:
L2CAP编程非常重要,它和HCI基本就是Linux Bluetooth编程的基础了。几乎所有协议的连接,断连,读写都是用L2CAP连接来做的。
1.创建L2CAP Socket:
socket(PF_BLUETOOTH, SOCK_RAW, BTPROTO_L2CAP);
domain=PF_BLUETOOTH, type可以是多种类型。protocol=BTPROTO_L2CAP.
2.绑定:
// Bind to local address
memset(&addr, 0, sizeof(addr));
addr.l2_family = AF_BLUETOOTH;
bacpy(&addr.l2_bdaddr, &bdaddr); //bdaddr为本地Dongle BDAddr
if (bind(sk, (struct sockaddr *) &addr, sizeof(addr)) < 0) {
perror("Can't bind socket");
goto error;
}
3.连接
memset(&addr, 0, sizeof(addr));
addr.l2_family = AF_BLUETOOTH;
bacpy(addr.l2_bdaddr, src);
addr.l2_psm = xxx;
if (connect(sk, (struct sockaddr *) &addr, sizeof(addr)) < 0) {
perror("Can't connect");
goto error;
}
注意:
struct sockaddr_l2 {
sa_family_t l2_family; //必须为 AF_BLUETOOTH
unsigned short l2_psm; //与前面PSM对应,这一项很重要
bdaddr_t l2_bdaddr; //Remote Device BDADDR
unsigned short l2_cid;
};
4. 发送数据到Remote Device:
send()或write()都可以。
5. 接收数据:
revc() 或read()
以下为实例:
注:在Bluetooth下,主动去连接的一端作为主机端。被动等别人连接的作为Client端。
背景知识1:Bluetooth设备的状态
之前HCI编程时,是用 ioctl(HCIGETDEVINFO)得到某个Device Info(hci_dev_info).其中flags当时解释的很简单。其实它存放着Bluetooth Device(例如:USB Bluetooth Dongle)的当前状态:
其中,UP,Down状态表示此Device是否启动起来。可以使用ioctl(HCIDEVUP)等修改这些状态。
另外:就是Inquiry Scan, PAGE Scan这些状态:
Sam在刚开始自己做L2CAP层连接时,使用另一台Linux机器插USB Bluetooth Dongle作Remote Device。怎么也没法使用inquiry扫描到remote设备,也没法连接remote设备,甚至无法使用l2ping ping到remote设备。觉得非常奇怪,后来才发现Remote Device状态设置有问题。没有设置PSCAN和ISCAN。
Inquiry Scan状态表示设备可被inquiry. Page Scan状态表示设备可被连接。
#hciconfig hci0 iscan
#hciconfig hci0 pscan
或者:#hciconfig hci0 piscan
就可以设置为PSCAN或者iSCAN状态了。
编程则可以使用ioctl(HCISETSCAN) . dev_opt = SCAN_INQUIRY;dr.dev_opt = SCAN_PAGE;dr.dev_opt = SCAN_PAGE | SCAN_INQUIRY;
则可以inquiry或者connect了。
Logical Link Control and Adaptation Protocol(L2CAP)
逻辑连接控制和适配协议(L2CAP) 为上层协议提供面向连接和无连接的数据服务,并提供多协议功能和分割重组操作。L2CAP充许上层协议和应用软件传输和接收最大长度为 64K的 L2CAP数据包。
L2CAP基于 通道(channel)的概念。 通道 (Channel)是位于基带 (baseband)连接之上的逻辑连接。每个通道以多对一的方式绑定一个单一协议 (single protocol)。多个通道可以绑定同一个协议,但一个通道不可以绑定多个协议。每个在通道里接收到的 L2CAP数据包被传到相应的上层协议。 多个通道可共享同一个基带连接。
L2CAP处于Bluetooth协议栈的位置如下:
也就是说,所有L2CAP数据均通过HCI传输到Remote Device。且上层协议的数据,大都也通过L2CAP来传送。
L2CAP可以发送Command。例如连接,断连等等。
下面看Command例子:Connection Request:
其中PSM比较需要注意,L2CAP 使用L2CAP连接请求(Connection Request )命令中的PSM字段实现协议复用。L2CAP可以复用发给上层协议的连接请求,这些上层协议包括服务发现协议SDP(PSM = 0x0001)、RFCOMM(PSM = 0x0003)和电话控制(PSM = 0x0005)等。
| Protocol | PSM | Reference |
| SDP | 0x0001 | SeeBluetooth Service Discovery Protocol (SDP), Bluetooth SIG. |
| RFCOMM | 0x0003 | See RFCOMM with TS 07.10, Bluetooth SIG. |
| TCS-BIN | 0x0005 | SeeBluetooth Telephony Control Specification / TCS Binary, Bluetooth SIG. |
| TCS-BIN-CORDLESS | 0x0007 | SeeBluetooth Telephony Control Specification / TCS Binary, Bluetooth SIG. |
| BNEP | 0x000F | SeeBluetooth Network Encapsulation Protocal, Bluetooth SIG. |
| HID_Control | 0x0011 | See Human Interface Device , Bluetooth SIG. |
| HID_Interrupt | 0x0013 | See Human Interface Device, Bluetooth SIG. |
| UPnP | 0x0015 | See [ESDP] , Bluetooth SIG. |
| AVCTP | 0x0017 | See Audio/Video Control Transport Protocol , Bluetooth SIG. |
| AVDTP | 0x0019 | See Audio/Video Distribution Transport Protocol , Bluetooth SIG. |
| AVCTP_Browsing | 0x001B | See Audio/Video Remote Control Profile, Bluetooth SIG |
| UDI_C-Plane | 0x001D | See the Unrestricted Digital Information Profile [UDI], Bluetooth SIG |
二:L2CAP编程方法:
L2CAP编程非常重要,它和HCI基本就是Linux Bluetooth编程的基础了。几乎所有协议的连接,断连,读写都是用L2CAP连接来做的。
1.创建L2CAP Socket:
socket(PF_BLUETOOTH, SOCK_RAW, BTPROTO_L2CAP);
domain=PF_BLUETOOTH, type可以是多种类型。protocol=BTPROTO_L2CAP.
2.绑定:
// Bind to local address
memset(&addr, 0, sizeof(addr));
addr.l2_family = AF_BLUETOOTH;
bacpy(&addr.l2_bdaddr, &bdaddr); //bdaddr为本地Dongle BDAddr
if (bind(sk, (struct sockaddr *) &addr, sizeof(addr)) < 0) {
perror("Can't bind socket");
goto error;
}
3.连接
memset(&addr, 0, sizeof(addr));
addr.l2_family = AF_BLUETOOTH;
bacpy(addr.l2_bdaddr, src);
addr.l2_psm = xxx;
if (connect(sk, (struct sockaddr *) &addr, sizeof(addr)) < 0) {
perror("Can't connect");
goto error;
}
注意:
struct sockaddr_l2 {
sa_family_t l2_family; //必须为 AF_BLUETOOTH
unsigned short l2_psm; //与前面PSM对应,这一项很重要
bdaddr_t l2_bdaddr; //Remote Device BDADDR
unsigned short l2_cid;
};
4. 发送数据到Remote Device:
send()或write()都可以。
5. 接收数据:
revc() 或read()
以下为实例:
注:在Bluetooth下,主动去连接的一端作为主机端。被动等别人连接的作为Client端。
背景知识1:Bluetooth设备的状态
之前HCI编程时,是用 ioctl(HCIGETDEVINFO)得到某个Device Info(hci_dev_info).其中flags当时解释的很简单。其实它存放着Bluetooth Device(例如:USB Bluetooth Dongle)的当前状态:
其中,UP,Down状态表示此Device是否启动起来。可以使用ioctl(HCIDEVUP)等修改这些状态。
另外:就是Inquiry Scan, PAGE Scan这些状态:
Sam在刚开始自己做L2CAP层连接时,使用另一台Linux机器插USB Bluetooth Dongle作Remote Device。怎么也没法使用inquiry扫描到remote设备,也没法连接remote设备,甚至无法使用l2ping ping到remote设备。觉得非常奇怪,后来才发现Remote Device状态设置有问题。没有设置PSCAN和ISCAN。
Inquiry Scan状态表示设备可被inquiry. Page Scan状态表示设备可被连接。
#hciconfig hci0 iscan
#hciconfig hci0 pscan
或者:#hciconfig hci0 piscan
就可以设置为PSCAN或者iSCAN状态了。
编程则可以使用ioctl(HCISETSCAN) . dev_opt = SCAN_INQUIRY;dr.dev_opt = SCAN_PAGE;dr.dev_opt = SCAN_PAGE | SCAN_INQUIRY;
则可以inquiry或者connect了。

相关文章推荐
- 实战Linux Bluetooth编程(四) L2CAP层编程
- (转)linux下bluetooth编程(四)L2CAP层编程
- linux下bluetooth编程(四)L2CAP层编程
- 实战Linux Bluetooth编程(四) L2CAP层编程
- 实战Linux Bluetooth编程(四) L2CAP层编程
- linux下bluetooth编程(三)HCI层编程
- linux下bluetooth编程(二)blueZ协议栈
- linux下bluetooth编程(七)SDP协议
- linux下的bluetooth编程之环境构筑
- 实战Linux Bluetooth编程(九) SDP层编程
- 实战Linux Bluetooth编程
- linux下bluetooth编程(七)SDP协议
- linux下bluetooth编程(三)HCI层编程
- 实战Linux Bluetooth编程(五) Socket与Bluetooth
- 实战Linux Bluetooth编程
- 实战Linux Bluetooth编程(二) BlueZ简介
- 实战Linux Bluetooth编程 (九) SDP层编程
- 实战Linux Bluetooth编程(2)
- linux下bluetooth编程(八)SDP层编程
- Linux 下的Bluetooth 架构 分类: Android驱动 2012-03-16 11:07 492人阅读 评论(0) 收藏 举报 实战Linux Bluetooth编程(一) 协议栈概述