memcached源码分析之hashtable
2012-12-23 21:24
423 查看
memcached中hashtable部分的源码主要分布在assoc.h/c、hash.h/c中,总得来说代码比较简单,这里就稍微介绍一下。
hashtable通常包括哈希函数和解决冲突的方法两个最主要的因素,memcached使用的哈希函数为Bob Jenkins在1996年发明的,定义位于hash.h中,实现在hash.c中,作者与2006年时提出另一个新的hash算法,其具有更快的速度(近2倍)和更大的吞吐量,详情请参照:http://burtleburtle.net/bob/hash/doobs.html,这里不进行介绍了。
解决冲突的方法,memcached中采用了链地址法(或拉链法),从数据结构书中截取的一个采用链地址法(哈希函数为:key MOD 13)解决冲突的示意图:
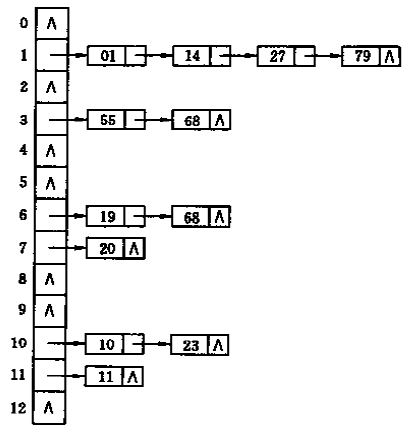
所不同的是,memcached中定义了primary_hashtable和old_hashtable,当hashtable的填装因子(memcached中硬编码为 3/2,无法确定如何定值的),assoc_maintenance_thread线程会将old_hashtable中的items以hash_bulk_move个buckets为单位,逐步移到primary_hashtable中。
对外接口:
// 完成primary_hashtable的初始化
void assoc_init(void);
// 根据key和nkey查找对应的item
item *assoc_find(const char *key, const size_t nkey);
// 将item插入hashtable中
int assoc_insert(item *item);
// 从hashtable中删除key对应的item
void assoc_delete(const char *key, const size_t nkey);
// 下面两个函数分别为启动和结束hashtable维护的线程,如果不需要这个功能,可以不调用,就是会浪费primary_hashtable指针数组占用的内存资源
int start_assoc_maintenance_thread(void);
void stop_assoc_maintenance_thread(void);
void do_assoc_move_next_bucket(void); // 函数没有实现
实现部分:
首先介绍几个用到的变量:
static pthread_cond_t maintenance_cond; // 同步insert和hashtable维护线程的条件变量
static unsigned int hashpower = 16;
#define hashsize(n) ((ub4)1<<(n)) //hashtable初始化大小设置为2^16
#define hashmask(n) (hashsize(n)-1) // 初始hashmask=0x1111 1111 1111 1111,用来将哈希函数计算的结果映射到hashsize域内,hashmask二进制值永远是hashpower位1的串
static unsigned int hash_items = 0; // hashtable中存在的item数量
static bool expanding = false; // 是否正在扩展的flag
static unsigned int expand_bucket = 0; // 当前扩展的位置(old_hashtable中的索引)
[cpp] view
plaincopy
// hashtable初始化
void assoc_init(void) {
// 分配hashsize个buckets,每个bucket就是一个单向链表或null
primary_hashtable = calloc(hashsize(hashpower), sizeof(void *));
if (! primary_hashtable) {
fprintf(stderr, "Failed to init hashtable.\n");
exit(EXIT_FAILURE);
}
}
[cpp] view
plaincopy
根据key和nkey查找对应的item,不存在返回NULL
item *assoc_find(const char *key, const size_t nkey) {
uint32_t hv = hash(key, nkey, 0);
item *it;
unsigned int oldbucket;
// 如果正在扩展中,且hash值映射到尚未移入新primary_hashtable中的item,在old_hashtable查找,
// 当前即将扩展索引expand_bucket位置的bucket,大于等于expand_bucket表示还在old_hashtable中
if (expanding &&
(oldbucket = (hv & hashmask(hashpower - 1))) >= expand_bucket)
{
it = old_hashtable[oldbucket];
} else {
it = primary_hashtable[hv & hashmask(hashpower)];
}
item *ret = NULL;
int depth = 0;
while (it) {
// 遍历单向链表,查找相应的item
if ((nkey == it->nkey) && (memcmp(key, ITEM_key(it), nkey) == 0)) {
ret = it;
break;
}
it = it->h_next;
++depth;
}
MEMCACHED_ASSOC_FIND(key, nkey, depth);
return ret;
}
[cpp] view
plaincopy
/* returns the address of the item pointer before the key. if *item == 0,
the item wasn't found */
static item** _hashitem_before (const char *key, const size_t nkey) {
uint32_t hv = hash(key, nkey, 0);
item **pos;
unsigned int oldbucket;
if (expanding &&
(oldbucket = (hv & hashmask(hashpower - 1))) >= expand_bucket)
{
pos = &old_hashtable[oldbucket];
} else {
pos = &primary_hashtable[hv & hashmask(hashpower)];
}
while (*pos && ((nkey != (*pos)->nkey) || memcmp(key, ITEM_key(*pos), nkey))) {
pos = &(*pos)->h_next;
}
return pos;
}
比较函数assoc_find和_hashitem_before,发现两者只是返回值不同,assoc_find使用了item指针(item*),而_hashitem_before使用了item指针的指针(item**),查找过程都是一样的,_hashitem_before只是在assoc_delete中调用,返回指针的指针,方便直接修改指向的地址,从而删除此item;使用指针同样可以达到效果,但是必须修改指向的item的值,相比较前者效率更高。
[cpp] view
plaincopy
/* Note: this isn't an assoc_update. The key must not already exist to call this */
// 上面英文注释已经说的很清楚了,插入的item的key必须在hashtable中不存在,否则assert错误
int assoc_insert(item *it) {
uint32_t hv;
unsigned int oldbucket;
assert(assoc_find(ITEM_key(it), it->nkey) == 0); /* shouldn't have duplicately named things defined */
// 计算hash值
hv = hash(ITEM_key(it), it->nkey, 0);
if (expanding &&
(oldbucket = (hv & hashmask(hashpower - 1))) >= expand_bucket)
{
// 如果正在展开hashtable过程中,则将映射到expand_bucket之后的,
// 即还没有展开的bucket部分,继续放在old_hashtable中,
// 这样,当查询这些item时,从old_hashtable能够获得,参见assoc_find
it->h_next = old_hashtable[oldbucket];
old_hashtable[oldbucket] = it;
} else {
// 链表操作,放入链表起始位置
it->h_next = primary_hashtable[hv & hashmask(hashpower)];
primary_hashtable[hv & hashmask(hashpower)] = it;
}
hash_items++;
if (! expanding && hash_items > (hashsize(hashpower) * 3) / 2) { //3、2不知道怎么定的
assoc_expand(); // 启动扩展
}
MEMCACHED_ASSOC_INSERT(ITEM_key(it), it->nkey, hash_items);
return 1;
}
[cpp] view
plaincopy
// 从hashtable中删除键值为key的item
void assoc_delete(const char *key, const size_t nkey) {
// 返回值是键值为key的item的指针的指针,感觉before用的不太恰当,开始以为是指向它前面的一个item
item **before = _hashitem_before(key, nkey);
if (*before) {
item *nxt;
hash_items--;
/* The DTrace probe cannot be triggered as the last instruction
* due to possible tail-optimization by the compiler
*/
MEMCACHED_ASSOC_DELETE(key, nkey, hash_items);
nxt = (*before)->h_next;
(*before)->h_next = 0; /* probably pointless, but whatever. */
*before = nxt;
return;
}
/* Note: we never actually get here. the callers don't delete things
they can't find. */
assert(*before != 0);
}
[cpp] view
plaincopy
// 扩展hashtable(这里只分配新的hashtable指针数组,设置相应的标志等,
// 真正的扩展在assoc_maintenance_thread线程中完成)
/* grows the hashtable to the next power of 2. */
static void assoc_expand(void) {
old_hashtable = primary_hashtable;
// 扩大为原来的2倍
primary_hashtable = calloc(hashsize(hashpower + 1), sizeof(void *));
if (primary_hashtable) {
if (settings.verbose > 1)
fprintf(stderr, "Hash table expansion starting\n");
hashpower++;
expanding = true;
expand_bucket = 0;
pthread_cond_signal(&maintenance_cond); // 设置条件变量
} else {
primary_hashtable = old_hashtable;
/* Bad news, but we can keep running. */
}
}
[cpp] view
plaincopy
// 创建hashtable维护线程
int start_assoc_maintenance_thread() {
int ret;
// 如果环境变量MEMCACHED_HASH_BULK_MOVE设置,则使用此设置值
// 维护线程中,每次扩展的粒度(每次hash_bulk_move个buckets)
char *env = getenv("MEMCACHED_HASH_BULK_MOVE");
if (env != NULL) {
hash_bulk_move = atoi(env);
if (hash_bulk_move == 0) {
hash_bulk_move = DEFAULT_HASH_BULK_MOVE;
}
}
if ((ret = pthread_create(&maintenance_tid, NULL,
assoc_maintenance_thread, NULL)) != 0) {
fprintf(stderr, "Can't create thread: %s\n", strerror(ret));
return -1;
}
return 0;
}
[cpp] view
plaincopy
// 停止hashtable维护线程
void stop_assoc_maintenance_thread() {
pthread_mutex_lock(&cache_lock);
do_run_maintenance_thread = 0; // 结束标志
pthread_cond_signal(&maintenance_cond);
pthread_mutex_unlock(&cache_lock);
/* Wait for the maintenance thread to stop */
pthread_join(maintenance_tid, NULL);
}
[cpp] view
plaincopy
#define DEFAULT_HASH_BULK_MOVE 1
int hash_bulk_move = DEFAULT_HASH_BULK_MOVE; // 数据转移粒度,即每次移动的bucket数量
// hashtable维护线程(hashtable扩展使用)
static void *assoc_maintenance_thread(void *arg) {
// 维护线程运行标志
while (do_run_maintenance_thread) {
int ii = 0;
/* Lock the cache, and bulk move multiple buckets to the new
* hash table. */
pthread_mutex_lock(&cache_lock); // 互斥访问old_hashtable
// 每次扩展hash_bulk_move(这里定义为1)个buckets到新的hashtable中
for (ii = 0; ii < hash_bulk_move && expanding; ++ii) {
item *it, *next;
int bucket;
// expand_bucket: 当前正在扩展的bucket索引
for (it = old_hashtable[expand_bucket]; NULL != it; it = next) {
next = it->h_next;
bucket = hash(ITEM_key(it), it->nkey, 0) & hashmask(hashpower);
it->h_next = primary_hashtable[bucket];
primary_hashtable[bucket] = it;
}
old_hashtable[expand_bucket] = NULL;
// 到达old_hashtable结尾,则扩展结束
expand_bucket++;
if (expand_bucket == hashsize(hashpower - 1)) {
expanding = false;
free(old_hashtable);
if (settings.verbose > 1)
fprintf(stderr, "Hash table expansion done\n");
}
}
if (!expanding) {
/* We are done expanding.. just wait for next invocation */
pthread_cond_wait(&maintenance_cond, &cache_lock);
}
pthread_mutex_unlock(&cache_lock);
}
return NULL;
}
查找的性能分析
从hashtable的构建和查找过程可见:
1.虽然hashtable在关键字和记录的存储位置之间建立了直接映像,但由于“冲突”的产生,hashtable的查找过程仍然是一个给定值和关键字相比较的过程,因此通常以平均查找长度作为衡量hashtable的度量。
2.查找过程中与关键字进行比较的次数通常取决于三个因素:哈希函数,解决冲突的方法和哈希表的填装因子。
哈希函数的好坏首先影响出现冲突的频繁程度,但是,对于“均匀”的哈希函数可以假定:不同的哈希函数对于同一组随机的关键字,产生冲突的可能性相同,因为一般情况下都假定哈希函数是均匀的,则不考虑它对平均查找长度的影响。
采用不同的处理冲突的方法,它们的平均查找长度也不同,通常处理冲突方法相同的hashtable,其平均查找长度依赖于哈希表的装填因子:
装填因子a = 表中填入的记录数/哈希表长度
哈希表装填因子a表明哈希表的装满程度,一般越小发生冲突的可能性也就越小,反之,冲突可能性越大,查找过程中与关键字比较的次数越多。
平均查找长度一般符合下式(来自《数据结构》书籍):
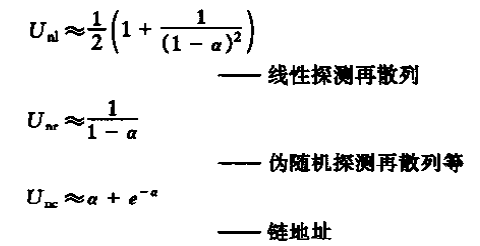
由此可见hashtable的平均查找长度是a的函数,而不是n的函数,由此,不管n多大,总可以选择一个合适的装填因子a以便将平均查找长度限定在一个范围内。
程序中hashtable扩展时出现的3/2就是装填因子,不确定具体的值是怎么选取的。
研究开源软件一方面是学习,另一方是应用,memcached的hashtable模块化设计非常好,只要稍加改动就可以应用了。
第一个就是item结构体的定义,在hashtable内部只用到了item结构体的nkey,h_next字段和ITEM_key宏,保留前2个字段,并改写ITEM_key宏就可以忽略memcached的协议相关的设计;
第二个就是pthread_mutex_t cache_lock定义,用于assoc_*函数的互斥操作hashtable;
第三个是#define ENDIAN_LITTLE 1宏定义,由于hash函数采用了位操作,所以必须定义;
其它的就是trace.h中定义的宏和一些基本变量的别名定义,如uint8_t,uint16_t,uint32_t等;
最后一定要将上述的定义include进入hash.c和assoc.c中。
hashtable通常包括哈希函数和解决冲突的方法两个最主要的因素,memcached使用的哈希函数为Bob Jenkins在1996年发明的,定义位于hash.h中,实现在hash.c中,作者与2006年时提出另一个新的hash算法,其具有更快的速度(近2倍)和更大的吞吐量,详情请参照:http://burtleburtle.net/bob/hash/doobs.html,这里不进行介绍了。
解决冲突的方法,memcached中采用了链地址法(或拉链法),从数据结构书中截取的一个采用链地址法(哈希函数为:key MOD 13)解决冲突的示意图:
所不同的是,memcached中定义了primary_hashtable和old_hashtable,当hashtable的填装因子(memcached中硬编码为 3/2,无法确定如何定值的),assoc_maintenance_thread线程会将old_hashtable中的items以hash_bulk_move个buckets为单位,逐步移到primary_hashtable中。
对外接口:
// 完成primary_hashtable的初始化
void assoc_init(void);
// 根据key和nkey查找对应的item
item *assoc_find(const char *key, const size_t nkey);
// 将item插入hashtable中
int assoc_insert(item *item);
// 从hashtable中删除key对应的item
void assoc_delete(const char *key, const size_t nkey);
// 下面两个函数分别为启动和结束hashtable维护的线程,如果不需要这个功能,可以不调用,就是会浪费primary_hashtable指针数组占用的内存资源
int start_assoc_maintenance_thread(void);
void stop_assoc_maintenance_thread(void);
void do_assoc_move_next_bucket(void); // 函数没有实现
实现部分:
首先介绍几个用到的变量:
static pthread_cond_t maintenance_cond; // 同步insert和hashtable维护线程的条件变量
static unsigned int hashpower = 16;
#define hashsize(n) ((ub4)1<<(n)) //hashtable初始化大小设置为2^16
#define hashmask(n) (hashsize(n)-1) // 初始hashmask=0x1111 1111 1111 1111,用来将哈希函数计算的结果映射到hashsize域内,hashmask二进制值永远是hashpower位1的串
static unsigned int hash_items = 0; // hashtable中存在的item数量
static bool expanding = false; // 是否正在扩展的flag
static unsigned int expand_bucket = 0; // 当前扩展的位置(old_hashtable中的索引)
[cpp] view
plaincopy
// hashtable初始化
void assoc_init(void) {
// 分配hashsize个buckets,每个bucket就是一个单向链表或null
primary_hashtable = calloc(hashsize(hashpower), sizeof(void *));
if (! primary_hashtable) {
fprintf(stderr, "Failed to init hashtable.\n");
exit(EXIT_FAILURE);
}
}
[cpp] view
plaincopy
根据key和nkey查找对应的item,不存在返回NULL
item *assoc_find(const char *key, const size_t nkey) {
uint32_t hv = hash(key, nkey, 0);
item *it;
unsigned int oldbucket;
// 如果正在扩展中,且hash值映射到尚未移入新primary_hashtable中的item,在old_hashtable查找,
// 当前即将扩展索引expand_bucket位置的bucket,大于等于expand_bucket表示还在old_hashtable中
if (expanding &&
(oldbucket = (hv & hashmask(hashpower - 1))) >= expand_bucket)
{
it = old_hashtable[oldbucket];
} else {
it = primary_hashtable[hv & hashmask(hashpower)];
}
item *ret = NULL;
int depth = 0;
while (it) {
// 遍历单向链表,查找相应的item
if ((nkey == it->nkey) && (memcmp(key, ITEM_key(it), nkey) == 0)) {
ret = it;
break;
}
it = it->h_next;
++depth;
}
MEMCACHED_ASSOC_FIND(key, nkey, depth);
return ret;
}
[cpp] view
plaincopy
/* returns the address of the item pointer before the key. if *item == 0,
the item wasn't found */
static item** _hashitem_before (const char *key, const size_t nkey) {
uint32_t hv = hash(key, nkey, 0);
item **pos;
unsigned int oldbucket;
if (expanding &&
(oldbucket = (hv & hashmask(hashpower - 1))) >= expand_bucket)
{
pos = &old_hashtable[oldbucket];
} else {
pos = &primary_hashtable[hv & hashmask(hashpower)];
}
while (*pos && ((nkey != (*pos)->nkey) || memcmp(key, ITEM_key(*pos), nkey))) {
pos = &(*pos)->h_next;
}
return pos;
}
比较函数assoc_find和_hashitem_before,发现两者只是返回值不同,assoc_find使用了item指针(item*),而_hashitem_before使用了item指针的指针(item**),查找过程都是一样的,_hashitem_before只是在assoc_delete中调用,返回指针的指针,方便直接修改指向的地址,从而删除此item;使用指针同样可以达到效果,但是必须修改指向的item的值,相比较前者效率更高。
[cpp] view
plaincopy
/* Note: this isn't an assoc_update. The key must not already exist to call this */
// 上面英文注释已经说的很清楚了,插入的item的key必须在hashtable中不存在,否则assert错误
int assoc_insert(item *it) {
uint32_t hv;
unsigned int oldbucket;
assert(assoc_find(ITEM_key(it), it->nkey) == 0); /* shouldn't have duplicately named things defined */
// 计算hash值
hv = hash(ITEM_key(it), it->nkey, 0);
if (expanding &&
(oldbucket = (hv & hashmask(hashpower - 1))) >= expand_bucket)
{
// 如果正在展开hashtable过程中,则将映射到expand_bucket之后的,
// 即还没有展开的bucket部分,继续放在old_hashtable中,
// 这样,当查询这些item时,从old_hashtable能够获得,参见assoc_find
it->h_next = old_hashtable[oldbucket];
old_hashtable[oldbucket] = it;
} else {
// 链表操作,放入链表起始位置
it->h_next = primary_hashtable[hv & hashmask(hashpower)];
primary_hashtable[hv & hashmask(hashpower)] = it;
}
hash_items++;
if (! expanding && hash_items > (hashsize(hashpower) * 3) / 2) { //3、2不知道怎么定的
assoc_expand(); // 启动扩展
}
MEMCACHED_ASSOC_INSERT(ITEM_key(it), it->nkey, hash_items);
return 1;
}
[cpp] view
plaincopy
// 从hashtable中删除键值为key的item
void assoc_delete(const char *key, const size_t nkey) {
// 返回值是键值为key的item的指针的指针,感觉before用的不太恰当,开始以为是指向它前面的一个item
item **before = _hashitem_before(key, nkey);
if (*before) {
item *nxt;
hash_items--;
/* The DTrace probe cannot be triggered as the last instruction
* due to possible tail-optimization by the compiler
*/
MEMCACHED_ASSOC_DELETE(key, nkey, hash_items);
nxt = (*before)->h_next;
(*before)->h_next = 0; /* probably pointless, but whatever. */
*before = nxt;
return;
}
/* Note: we never actually get here. the callers don't delete things
they can't find. */
assert(*before != 0);
}
[cpp] view
plaincopy
// 扩展hashtable(这里只分配新的hashtable指针数组,设置相应的标志等,
// 真正的扩展在assoc_maintenance_thread线程中完成)
/* grows the hashtable to the next power of 2. */
static void assoc_expand(void) {
old_hashtable = primary_hashtable;
// 扩大为原来的2倍
primary_hashtable = calloc(hashsize(hashpower + 1), sizeof(void *));
if (primary_hashtable) {
if (settings.verbose > 1)
fprintf(stderr, "Hash table expansion starting\n");
hashpower++;
expanding = true;
expand_bucket = 0;
pthread_cond_signal(&maintenance_cond); // 设置条件变量
} else {
primary_hashtable = old_hashtable;
/* Bad news, but we can keep running. */
}
}
[cpp] view
plaincopy
// 创建hashtable维护线程
int start_assoc_maintenance_thread() {
int ret;
// 如果环境变量MEMCACHED_HASH_BULK_MOVE设置,则使用此设置值
// 维护线程中,每次扩展的粒度(每次hash_bulk_move个buckets)
char *env = getenv("MEMCACHED_HASH_BULK_MOVE");
if (env != NULL) {
hash_bulk_move = atoi(env);
if (hash_bulk_move == 0) {
hash_bulk_move = DEFAULT_HASH_BULK_MOVE;
}
}
if ((ret = pthread_create(&maintenance_tid, NULL,
assoc_maintenance_thread, NULL)) != 0) {
fprintf(stderr, "Can't create thread: %s\n", strerror(ret));
return -1;
}
return 0;
}
[cpp] view
plaincopy
// 停止hashtable维护线程
void stop_assoc_maintenance_thread() {
pthread_mutex_lock(&cache_lock);
do_run_maintenance_thread = 0; // 结束标志
pthread_cond_signal(&maintenance_cond);
pthread_mutex_unlock(&cache_lock);
/* Wait for the maintenance thread to stop */
pthread_join(maintenance_tid, NULL);
}
[cpp] view
plaincopy
#define DEFAULT_HASH_BULK_MOVE 1
int hash_bulk_move = DEFAULT_HASH_BULK_MOVE; // 数据转移粒度,即每次移动的bucket数量
// hashtable维护线程(hashtable扩展使用)
static void *assoc_maintenance_thread(void *arg) {
// 维护线程运行标志
while (do_run_maintenance_thread) {
int ii = 0;
/* Lock the cache, and bulk move multiple buckets to the new
* hash table. */
pthread_mutex_lock(&cache_lock); // 互斥访问old_hashtable
// 每次扩展hash_bulk_move(这里定义为1)个buckets到新的hashtable中
for (ii = 0; ii < hash_bulk_move && expanding; ++ii) {
item *it, *next;
int bucket;
// expand_bucket: 当前正在扩展的bucket索引
for (it = old_hashtable[expand_bucket]; NULL != it; it = next) {
next = it->h_next;
bucket = hash(ITEM_key(it), it->nkey, 0) & hashmask(hashpower);
it->h_next = primary_hashtable[bucket];
primary_hashtable[bucket] = it;
}
old_hashtable[expand_bucket] = NULL;
// 到达old_hashtable结尾,则扩展结束
expand_bucket++;
if (expand_bucket == hashsize(hashpower - 1)) {
expanding = false;
free(old_hashtable);
if (settings.verbose > 1)
fprintf(stderr, "Hash table expansion done\n");
}
}
if (!expanding) {
/* We are done expanding.. just wait for next invocation */
pthread_cond_wait(&maintenance_cond, &cache_lock);
}
pthread_mutex_unlock(&cache_lock);
}
return NULL;
}
查找的性能分析
从hashtable的构建和查找过程可见:
1.虽然hashtable在关键字和记录的存储位置之间建立了直接映像,但由于“冲突”的产生,hashtable的查找过程仍然是一个给定值和关键字相比较的过程,因此通常以平均查找长度作为衡量hashtable的度量。
2.查找过程中与关键字进行比较的次数通常取决于三个因素:哈希函数,解决冲突的方法和哈希表的填装因子。
哈希函数的好坏首先影响出现冲突的频繁程度,但是,对于“均匀”的哈希函数可以假定:不同的哈希函数对于同一组随机的关键字,产生冲突的可能性相同,因为一般情况下都假定哈希函数是均匀的,则不考虑它对平均查找长度的影响。
采用不同的处理冲突的方法,它们的平均查找长度也不同,通常处理冲突方法相同的hashtable,其平均查找长度依赖于哈希表的装填因子:
装填因子a = 表中填入的记录数/哈希表长度
哈希表装填因子a表明哈希表的装满程度,一般越小发生冲突的可能性也就越小,反之,冲突可能性越大,查找过程中与关键字比较的次数越多。
平均查找长度一般符合下式(来自《数据结构》书籍):
由此可见hashtable的平均查找长度是a的函数,而不是n的函数,由此,不管n多大,总可以选择一个合适的装填因子a以便将平均查找长度限定在一个范围内。
程序中hashtable扩展时出现的3/2就是装填因子,不确定具体的值是怎么选取的。
研究开源软件一方面是学习,另一方是应用,memcached的hashtable模块化设计非常好,只要稍加改动就可以应用了。
第一个就是item结构体的定义,在hashtable内部只用到了item结构体的nkey,h_next字段和ITEM_key宏,保留前2个字段,并改写ITEM_key宏就可以忽略memcached的协议相关的设计;
第二个就是pthread_mutex_t cache_lock定义,用于assoc_*函数的互斥操作hashtable;
第三个是#define ENDIAN_LITTLE 1宏定义,由于hash函数采用了位操作,所以必须定义;
其它的就是trace.h中定义的宏和一些基本变量的别名定义,如uint8_t,uint16_t,uint32_t等;
最后一定要将上述的定义include进入hash.c和assoc.c中。

相关文章推荐
- Linux c 开发 - Memcached源码分析之HashTable(4)
- memcached源码分析之hashtable
- [源码解析]HashMap和HashTable的区别(源码分析解读)
- Memcached源码分析之网络模型篇
- memcached源码学习-hashtable
- PHP源码分析之HashTable
- Memcached源码分析之资源分享
- Memcached源码分析
- Memcached源码分析之items.c
- Memcached源码分析(线程模型)
- Memcached源码分析之Hash表操作
- memcached源码分析之线程池机制(二)
- memcached源码分析-----哈希表基本操作以及扩容过程
- Memcached源码分析之内存管理
- memcached 源码分析之请求处理(状态机)
- Hashmap和hashtable三大区别(从源码角度分析为什么map可以存放一个key为null,多个值为null)的特点
- php与memcached服务器交互的分布式实现源码分析[memcache版]
- Memcached源码分析之资源分享
- Memcached源码分析之从SET命令开始说起
- Memcached源码分析之slabs.c