基础学习笔记——Recall, Precision, and Average Precision
2012-09-01 21:03
447 查看
以下内容绝大部分内容翻译自:
Mu Zhu , Recall, Precision, and Average Precision. Working Paper 2004-09 Department of Statistics & Actuarial Science University of Waterloo.
1. 先介绍一些基础内容和符号说明
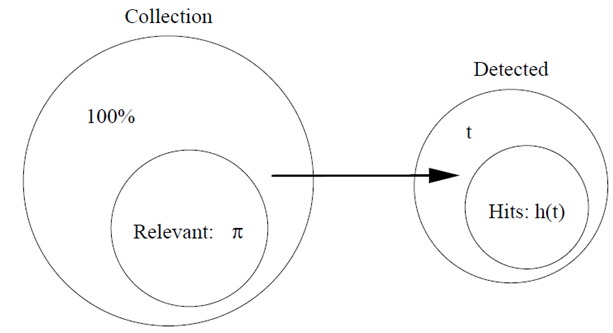
C:一个很大item的集合。
π:集合中相关的item的集合(π<< 1)。
t:算法所识别出的item的集合。
h(t):t中确实相关的item的集合,通常这部分称作命中(相反的是丢失)
下面看一些典型的“命中”曲线

假设其中相关item为5%。
hP(t)曲线是理想的曲线,几乎排在前面的所有的识别都命中了,直到5%,所有的相关item都耗尽了,曲线不再变化。
hR(t)曲线是随机选择的曲线
hA(t)和hB(t)是典型的识别曲线
(两条曲线相交是可能的)
“命中曲线”能够很清楚地告诉我们一个模型或者是算法的性能好坏。例如,如果在任何时候,有 hA(t)>hB(t),则算法A毫无疑问比算法B出色;如果一般情况下,一条曲线总是随着t的增长而快速增长,则这个算法被认为是强壮的;特别的,一个最好的算法应该拥有最大地斜率,直到 t=π。
然而,我们需要的不仅是对算法好坏的评估和比较,而是要往好的方面来调整算法。经常,我们需要半人工地来产生一些算法的最优经验参数就像交叉验证。举例来说,对于
K - nearest-neighbor算法,我们必须选择最合适的K,然后通过交叉验证找出出色的值。因此,我们可以看到,我们更为需要的是一个评估值,而不是一条曲线。
两个数值化的评估方法通常是:recall和precision
2. 简单介绍 Recall 和 Precision
简单定义:
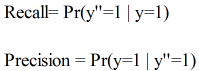
Recall:在所有item中识别出相关item的概率。
Precision:在算法所识别出的item中,真正相关的概率。
形式化定义:
设 ω 是集合 C 中随机取出的一个元素

则
或者可以表示成

3. Recall 和 Precision 之间的关系
引理1:

证明: 根据贝叶斯公式,可以得到:

注意:在这里,我们将Precision和Recall都看作是关于自变量 t 的函数,因为一般来说,随着 t 的变化,算法的一些表现也会跟着变化。
h(t) , r(t) , p(t) 都看作是连续光滑的曲线,因为集合C足够大。
引理2:
1. r(0) = 0 r(1) = 1
2. r'(t) >= 0 (t∈[0,1])
证明:
1. 显然,当 t = 0 时,Recall必然为0,因为没有item被检测;
当 t = 1 时,Recall必然等于1,因为所有的item都被检测了,那么也必定包括所有相关的item;
2. 显然,r (t+△t) > r(t) 或者 r (t+△t) = r(t)
所以,r (t+△t) >= r(t)
假设 t 在几乎任何一点都可导,则有:

所以 r'(t)
>= 0 ( t∈[0,1] )
引理2说明了 r(t) 是一个非递减函数,而且对于一个典型的识别算法来说,一般都有 r''(t) <= 0,即识别率是渐渐减缓的,直观上来说
随着 t 的上升,识别变得越来越困难。
假设1:假设 r(t) 是二次可微函数,则 r''(t) <= 0 , t∈[0,1].
引理3:假设 p(t) 可微,若假设1成立,则 p'(t)<= 0 , t∈[0,1].
证明:

根据中值定理,存在 S ∈[0,t].
使得 r(t) - r(0) = r'(s) (t - 0)
∵ r(0) = 0;
∴ r(t) = r'(s)t
又根据假设1, 有 r''(t) <= 0
所以 r'(s) >= r'(t) (s<=t)
所以 r'(s)t >= r'(t)t
即 r(t) >= r'(t)t
则 p'(t) <= 0
根据之前所证明的,r'(t) >= 0,可以看出,Recall和Precision的确存在某些相互影响的关系。
(此证明基于假设1,r(t)的二阶导数小于等于0,即r''(t)是凸函数)
所以说,单用这两个之中的某一个来评估和比较都不太合适,下面介绍的AP将会同时考虑Recall和Precision,因此常被用来作为衡量和评估的标准。
4. Average Precision(AP)
首先,Precision能被表示成Recall的函数,p(r), 因为 p(t) = π*r(t)/t ,具体见上所述。
AP的定义如下:

引理4:设r(t)可微函,则:

某些情况下,AP并不怎么直观,当 r'(t) = 0时,p(t)必然decreasing in t (无论在哪个区间内)
上面这句话不是特别理解。。。。
然而,因为dr为0,那么AP无论如何不会在此区间内发生变化。
下面举一些例子:
1. Random Selection:
假设 h(t) = π*t,即相关的比例在所有识别的比例中保持为 π
则 r(t) = h(t)/π = t
此时:AP = π
2. Perfect Detection:
h(t)= t [0,π]
h(t)=π (π,1]
这说明:前π个识别,全部命中,即h(t) = t,当π被耗尽时,h(t) = π,保持不变
这是最理想识别,也说明:
r(t) = t/π [0,π]
r(t) = 1 (π,1]
此时的AP = 1;
3. 实际应用中:
假设有n个测试item,将他们根据置信度又高到底排列后,计算:
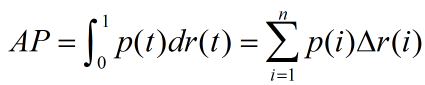
其中,△r(i)表示后一次识别后,recall的变化量,
p(i)可表示为:R/i ,其中R前i个item中,相关的item个数。
因此AP也可表示为:

其中,R表示测试集所有的relavant的item个数;
n表示测试集中item的数量;
Ij = 1,如果第j个item相关,否则,Ij = 0;
Rj,前j个item中,相关的item个数;
下面看个例子:
假设这些item的置信度已经由高到底排列:



因此,算法A好于算法B。
由此也可以看出,AP这个衡量标准更偏爱识别得早的算法。
后略。
希望大家帮忙改正。

相关文章推荐
- 基础学习笔记——Recall, Precision, and Average Precision
- Pro visual c++/cli and .net 2.0 platform2 学习笔记(7第二章 C++/CLI基础=2)
- 【学习笔记】PHP基础-变量and运算符
- 【YOLO学习】召回率(Recall),精确率(Precision),平均正确率(Average_precision(AP) ),交除并(Intersection-over-Union(IoU))
- Recall, Precision, and Average Precision
- 【YOLO学习】召回率(Recall),精确率(Precision),平均正确率(Average_precision(AP) ),交除并(Intersection-over-Union(IoU))
- 【YOLO学习】召回率(Recall),精确率(Precision),平均正确率(Average_precision(AP) ),交除并(Intersection-over-Union(IoU))
- 【YOLO学习】召回率(Recall),精确率(Precision),平均正确率(Average_precision(AP) ),交除并(Intersection-over-Union(IoU))
- Precision、Recall and Mean Average Precision(MAP)
- 基础学习笔记——Recall, Precision, and Average Precision
- 【YOLO学习】召回率(Recall),精确率(Precision),平均正确率(Average_precision(AP) ),交除并(Intersection-over-Union(IoU))
- Recall, Precision, and Average Precision
- Recall, Precision, and Average Precision
- coursera NLP学习笔记之week1课程介绍&基础的文本处理
- java基础学习笔记(复习) ---- 数组
- Guava学习笔记(1)--安全地使用null(Using and avoiding null)
- shell学习基础-笔记
- 黑马程序员之WinForm编程基础学习笔记:在多行文本框中输入多行"姓名=成绩"格式的数据,要求输出成绩最高的学生的姓名和成绩。
- UnityShader入门精要学习笔记(八):基础纹理之凹凸映射
- Angular2 Directive 学习笔记-基础篇