Linux/Android启动 之 (module_init和machine-init函数)
2012-02-17 10:25
302 查看
Linux/Android启动之Machine-Init函数
一. 基础知识
1. Linux启动过程中驱动模块初始化的位置
Linux OS的启动过程中将会去创建线程kernel_init,该线程负责Driver初始化等一系列工作。线程kernel_init将会依次调用do_basic_setup()-->do_initcalls()-->do_one_initcall(),并在do_initcalls()中完成对各个驱动模块Init函数的调用。
这部分代码如下:
函数do_basic_setup()如下:
| /* * Ok, the machine is now initialized. None of the devices * have been touched yet, but the CPU subsystem is up and * running, and memory and process management works. * * Now we can finally start doing some real work.. */ static void __init do_basic_setup(void) { rcu_init_sched(); /* needed by module_init stage. */ init_workqueues(); usermodehelper_init(); driver_init(); init_irq_proc(); do_initcalls(); } |
| extern initcall_t __initcall_start[], __initcall_end[], __early_initcall_end[]; static void __init do_initcalls(void) { initcall_t *call; for (call = __early_initcall_end; call < __initcall_end; call++) do_one_initcall(*call); /* Make sure there is no pending stuff from the initcall sequence */ flush_scheduled_work(); } |
| int initcall_debug; core_param(initcall_debug, initcall_debug, bool, 0644); int do_one_initcall(initcall_t fn) { int count = preempt_count(); ktime_t calltime, delta, rettime; char msgbuf[64]; struct boot_trace_call call; struct boot_trace_ret ret; if (initcall_debug) { call.caller = task_pid_nr(current); printk("calling %pF @ %i/n", fn, call.caller); calltime = ktime_get(); trace_boot_call(&call, fn); enable_boot_trace(); } ret.result = fn(); if (initcall_debug) { disable_boot_trace(); rettime = ktime_get(); delta = ktime_sub(rettime, calltime); ret.duration = (unsigned long long) ktime_to_ns(delta) >> 10; trace_boot_ret(&ret, fn); printk("initcall %pF returned %d after %Ld usecs/n", fn, ret.result, ret.duration); } msgbuf[0] = 0; if (ret.result && ret.result != -ENODEV && initcall_debug) sprintf(msgbuf, "error code %d ", ret.result); if (preempt_count() != count) { strlcat(msgbuf, "preemption imbalance ", sizeof(msgbuf)); preempt_count() = count; } if (irqs_disabled()) { strlcat(msgbuf, "disabled interrupts ", sizeof(msgbuf)); local_irq_enable(); } if (msgbuf[0]) { printk("initcall %pF returned with %s/n", fn, msgbuf); } return ret.result; } |
二.Machine-Init函数被调用的位置
Machine-Init也将在函数do_one_initcall(initcall_t fn)中伴随其它的模块Init函数一起被调用,不同之处在于Machine-Init的优先级最高。三.Machine-Init函数相关解析过程
1. 重要结构体machine_desc说明
struct machine_desc描述了机器(machine, 也就是目标板)对内核初始阶段资源分配至关重要的一些参数。首先,来看一下结构体machine_des的内容(在arch/arm/include/asm/mach/arch.h):
| struct machine_desc { /* * Note! The first four elements are used * by assembler code in head.S, head-common.S */ unsigned intnr;/* architecture number,记录体系结构*/ unsigned intphys_io;/* start of physical io*/ unsigned intio_pg_offst;/* byte offset for io * page tabe entry*/ const char*name;/* architecture name,体系结构名字*/ unsigned longboot_params;/* tagged list*/ unsigned intvideo_start;/* start of video RAM*/ unsigned intvideo_end;/* end of video RAM*/ unsigned intreserve_lp0 :1;/* never has lp0*/ unsigned intreserve_lp1 :1;/* never has lp1*/ unsigned intreserve_lp2 :1;/* never has lp2*/ unsigned intsoft_reboot :1;/* soft reboot*/ void(*fixup)(struct machine_desc *, struct tag *, char **, struct meminfo *); void(*map_io)(void);/* IO mapping function*/ void(*init_irq)(void); struct sys_timer*timer;/* system tick timer*/ void(*init_machine)(void); }; |
2. 对应当前开发板的结构体machine_des的初始化
这里以Samsung S3C6410的开发板的BSP为例来进行分析。Samsung S3C6410的machine_des在文件arch/arm/mach-s3c6410/mach-s3c6410.c中定义,定义方式如下:
| MACHINE_START(SMDK6410, "SMDK6410") /* Maintainer: Ben Dooks <ben@fluff.org> */ .phys_io= S3C_PA_UART & 0xfff00000, .io_pg_offst= (((u32)S3C_VA_UART) >> 18) & 0xfffc, .boot_params= S3C64XX_PA_SDRAM + 0x100, .fixup= smdk6410_fixup, .init_irq= s3c6410_init_irq, .map_io= smdk6410_map_io, .init_machine= smdk6410_machine_init, #ifndef CONFIG_HIGH_RES_TIMERS .timer= &s3c64xx_timer, #else .timer= &sec_timer, #endif /* CONFIG_HIGH_RES_TIMERS */ MACHINE_END |
| /* * Set of macros to define architecture features. This is built into * a table by the linker. */ #define MACHINE_START(_type,_name)/ static const struct machine_desc __mach_desc_##_type/ __used/ __attribute__((__section__(".arch.info.init"))) = {/ .nr= MACH_TYPE_##_type,/ .name= _name, #define MACHINE_END/ }; |
| static const struct machine_desc__SMDK6410 __used __attribute__((__section__(".arch.info.init"))) = { /*__section__指定了该结构体被链接的位置*/ .nr = MACH_TYPE_SMDK6410, .name = "SMDK6410", phys_io= S3C_PA_UART & 0xfff00000, .io_pg_offst= (((u32)S3C_VA_UART) >> 18) & 0xfffc, .boot_params= S3C64XX_PA_SDRAM + 0x100, .fixup= smdk6410_fixup, .init_irq= s3c6410_init_irq, .map_io= smdk6410_map_io, .init_machine= smdk6410_machine_init, #ifndef CONFIG_HIGH_RES_TIMERS .timer= &s3c64xx_timer, #else .timer= &sec_timer, }; |
3. 函数setup_machine实现对结构体machine_des的定位
函数setup_machine实现对结构体machine_des位置的判别,其代码代码如下:| static struct machine_desc * __init setup_machine(unsigned int nr) { struct machine_desc *list; /* * locate machine in the list of supported machines.可能支持多个cpu哦 */ list = lookup_machine_type(nr); if (!list) { printk("Machine configuration botched (nr %d), unable " "to continue./n", nr); while (1); } printk("Machine: %s/n", list->name); return list; } |
而函数setup_machine被调用的过程如下(start_kernelàsetup_archàsetup_machine):
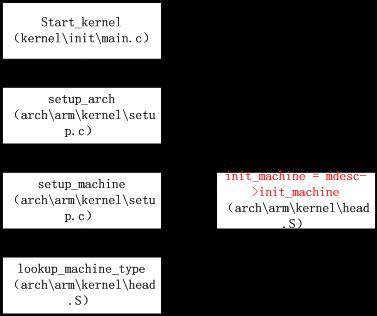
在函数setup_machine最后会在全局指针变量init_machine中记录Machine-Init函数的信息。
4. Machine-Init的导出
在文件arch/arm/kernel/setup.c中通过如下的方式将Machine-Init设置为模块的Init函数:| static void (*init_machine)(void) __initdata; static int __init customize_machine(void) { /* customizes platform devices, or adds new ones */ if (init_machine) init_machine(); return 0; } arch_initcall(customize_machine); |
在Linux中,没有办法像CE/Mobile中通过注册表的方式来定义驱动的优先级,只有通过导出函数的Level和Makefile中模块驱动书写的先后顺序来定义。
关于导出函数Level的代码如下:
| #define __define_initcall(level,fn) static initcall_t __initcall_##fn __attribute_used__ __attribute__((__section__(".initcall" level ".init"))) = fn #define core_initcall(fn) __define_initcall("1",fn) #define postcore_initcall(fn) __define_initcall("2",fn) #define arch_initcall(fn) __define_initcall("3",fn) #define subsys_initcall(fn) __define_initcall("4",fn) #define fs_initcall(fn) __define_initcall("5",fn) #define device_initcall(fn) __define_initcall("6",fn) #define late_initcall(fn) __define_initcall("7",fn) #define __initcall(fn) device_initcall(fn) #define __exitcall(fn) static exitcall_t __exitcall_##fn __exit_call = fn #define module_init(x) __initcall(x); #define module_exit(x) __exitcall(x); |

相关文章推荐
- Linux-Android启动之Machine-Init函数
- Linux/Android启动之Machine-Init函数
- Android 系统启动脚本init.rc语法解析
- Android init进程启动过程分析
- Android init进程启动
- Android init 启动过程分析1
- Android启动流程分析(六) init.rc的语法
- Android init.rc如何启动service去执行sh脚本
- Android init 启动过程分析1
- Android底层启动过程(应该说是应用进程init启动后的一些步骤)
- Android启动篇 — init原理2
- Android init 启动过程分析
- Android的init启动进程分析
- 分析Android 根文件系统启动过程(init守护进程分析)
- Android启动流程--学会使用init.rc
- Android init 启动过程分析2
- Android 启动过程总结(init开始)
- 分析Android+根文件系统启动过程(init守护进程分析)
- Android init 启动过程分析(1)
- Android M 启动源码分析笔记之 - Init 进程