计算机视觉基础2——相机成像的几何描述
2011-12-19 22:21
302 查看
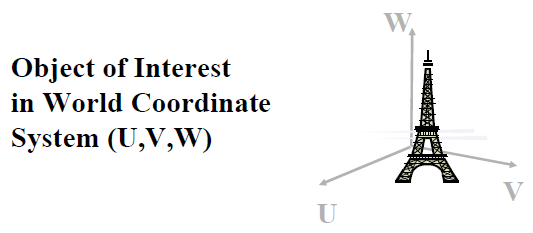
试想像一下,很多游客同时在不同角度拍摄Eiffel Tower(埃菲尔铁塔),该如何用数学的方法来描述这一过程呢?首先要解决的问题就是定位,或者说坐标选定的问题,埃菲尔铁塔只有一座,如果按经、纬度来刻画,它的坐标是唯一确定的,但游客显然不关系这一点,他(她)只按自己的喜好选择角度和位置,因此,物体(景物)有物体的坐标系统,相机有相机的坐标系统,即便同一个相机,当调整参数时,在同样的位置、相同的角度,也可能得到不同的图像。为了统一描述,有必要引入世界坐标(或物体坐标)、相机坐标和像平面坐标。
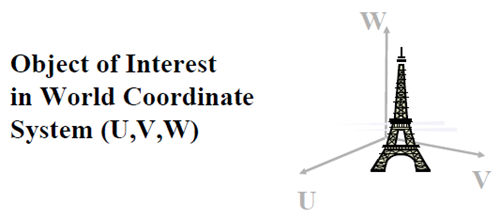
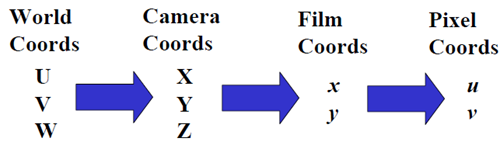
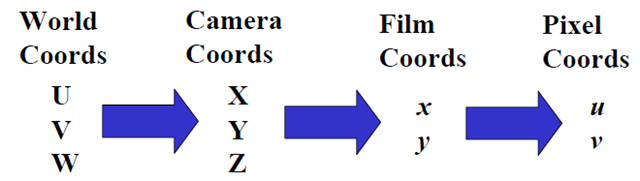
世界坐标用UVW记。
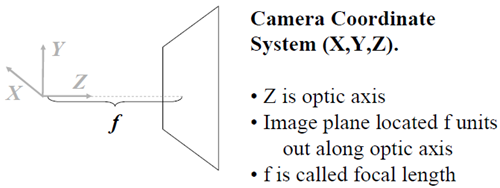
相机坐标用XYZ记。中学物理告诉我们,物体与像是倒的关系,但作为数学分析,我们采用虚像。像平面用xoy记。

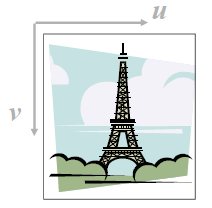
而数字图像用(u,v)来表示,不弄混淆像平面和数字图像这两个概念,同一个像通过平移、拉伸等,可以得到不同的数学图像(u,v)。
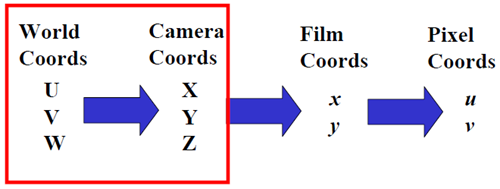
总体来看,就是

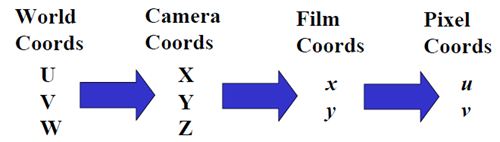
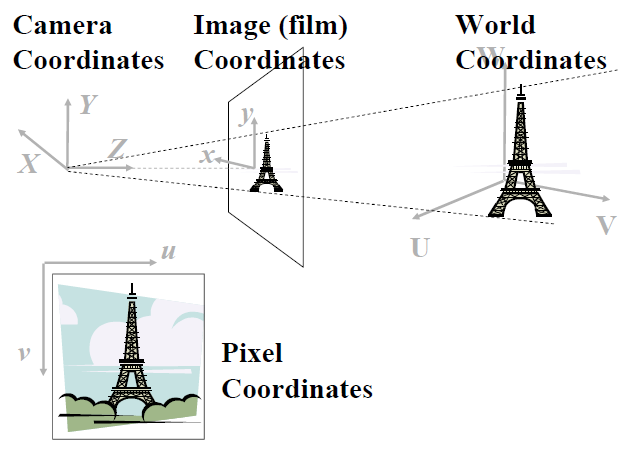
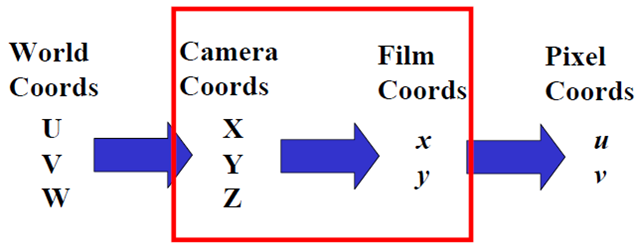
我们需要用数学的语言来描述这一过程。先看中间部分。

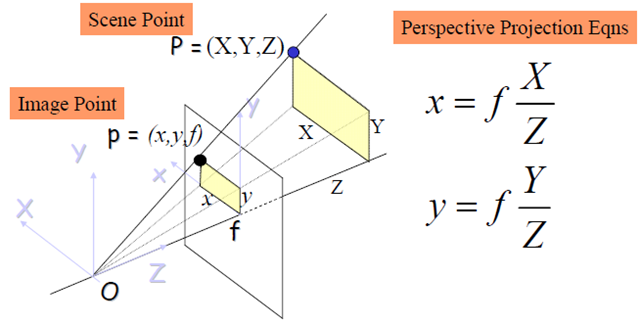
红框标注的部分是3D物体到2D像平面的透视投影(如果不明白透视投影的概念,需要补一下高等几何)

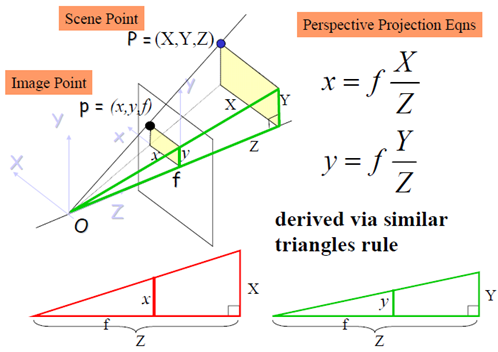
显然,OP上的任一点的像都是p(x,y),为了描述这一关系,需要引入齐次坐标。
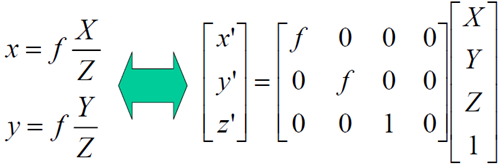
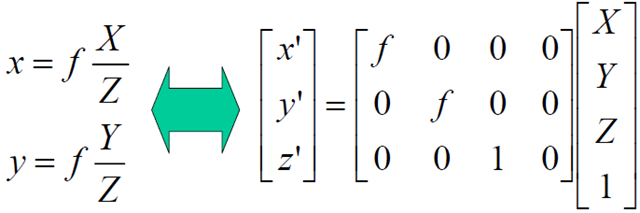
By convention, we specify that given (x’,y’,z’) we can recover the 2D point (x,y) as
$ x=\frac{x^'}{z^'} $ $ y=\frac{y^'}{z^'} $
Note: (x,y) = (x,y,1) = (2x, 2y, 2) = (k x, ky, k)
关于齐次坐标,更详细的介绍可参考高等几何。
上述透视投影的过程可以描述为
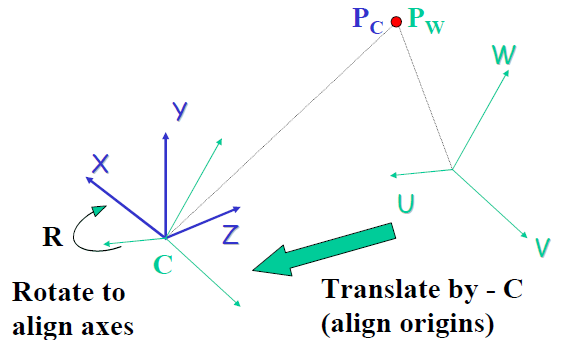
正如开头所言,不同游客会选择不同的位置和角度拍摄同一物体,因此,物体对于相机的关系各不相同,这就是物体到相机坐标变换的问题。
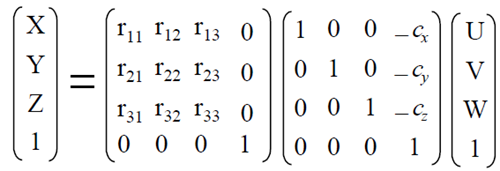
上述红框部分描述的是从物体的坐标(称为世界坐标)到相机坐标变换的过程,它是一种刚体运动,可以用平移、旋转来描述。
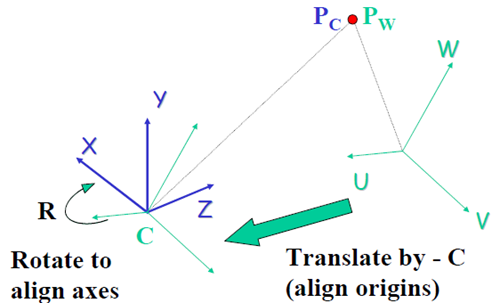
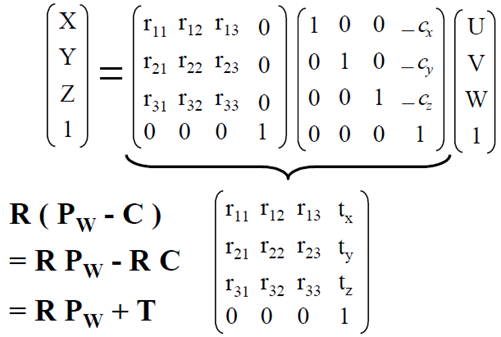
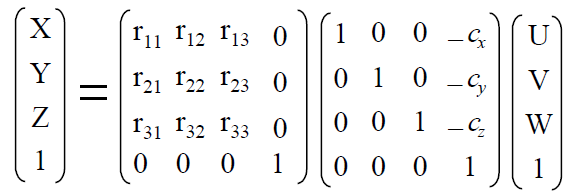
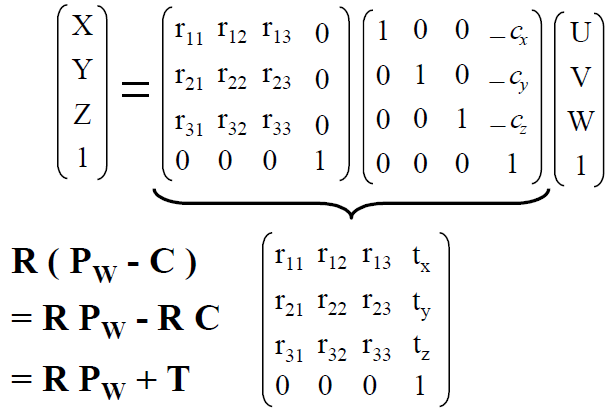
上图表示的是从世界坐标变换到相机坐标:$ P_c=R(P_w - C) $,写成矩阵形式
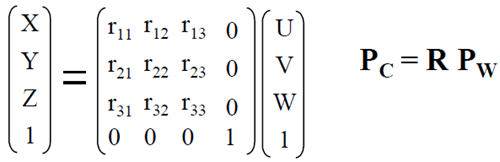
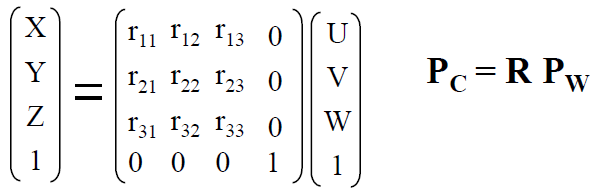
平移是容易理解的,我们先讨论更简单的情形,即假设世界坐标系和相机坐标系的原点重合,则变换只剩下旋转了。
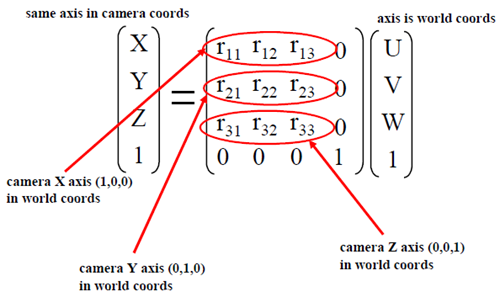
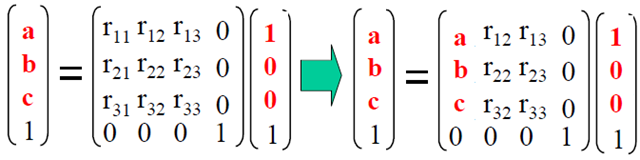
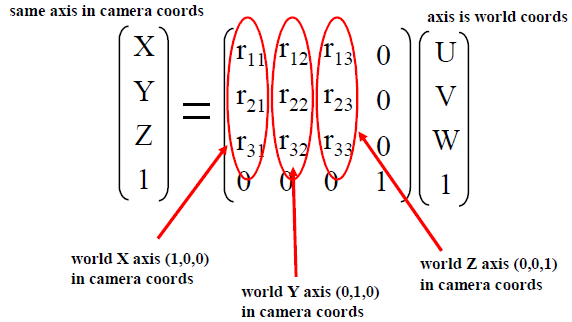
旋转矩阵的元素也很容易确定。试想(U,V,W)=(1,0,0),而它在相机坐标系中的坐标是(X,Y,Z)=(a,b,c)(同一物理点的不同坐标)则有:
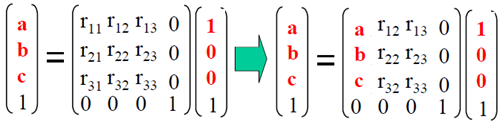
因此有:
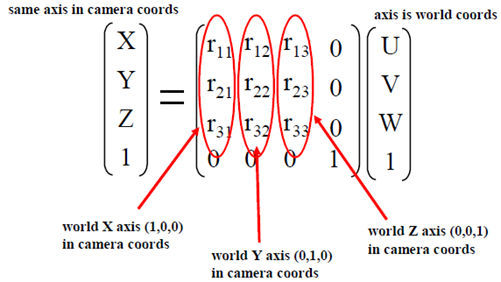
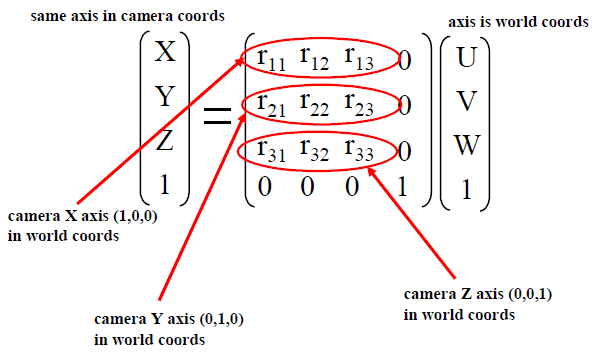
由于该旋转是刚体运动,因此它是正交变换,满足$ R^{-1}=R^T $,所以有:
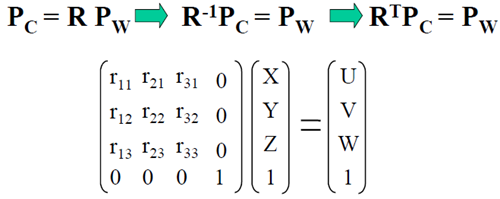
不难得出:
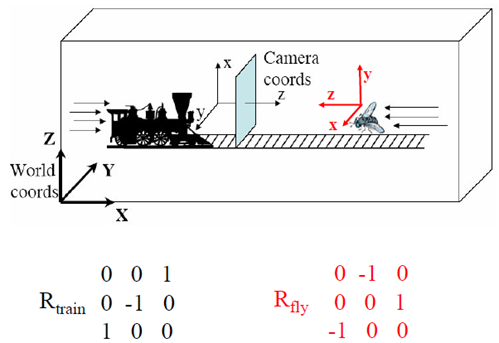
看一个例子:
由于物体的坐标到相机坐标的变换,相对于相机内部参数而言属于外部参数(External Parameters),往往写作R和T,即
总结
本小节讲述了如何将3D世界坐标系中的点变换到相机坐标系中,然后经透视投影,变成2D像平面上的点(x,y).
下一节:立体视觉基础3——内部参数描述
世界坐标用UVW记。

相机坐标用XYZ记。中学物理告诉我们,物体与像是倒的关系,但作为数学分析,我们采用虚像。像平面用xoy记。

而数字图像用(u,v)来表示,不弄混淆像平面和数字图像这两个概念,同一个像通过平移、拉伸等,可以得到不同的数学图像(u,v)。
总体来看,就是
我们需要用数学的语言来描述这一过程。先看中间部分。
红框标注的部分是3D物体到2D像平面的透视投影(如果不明白透视投影的概念,需要补一下高等几何)

显然,OP上的任一点的像都是p(x,y),为了描述这一关系,需要引入齐次坐标。
By convention, we specify that given (x’,y’,z’) we can recover the 2D point (x,y) as
$ x=\frac{x^'}{z^'} $ $ y=\frac{y^'}{z^'} $
Note: (x,y) = (x,y,1) = (2x, 2y, 2) = (k x, ky, k)
关于齐次坐标,更详细的介绍可参考高等几何。
上述透视投影的过程可以描述为
正如开头所言,不同游客会选择不同的位置和角度拍摄同一物体,因此,物体对于相机的关系各不相同,这就是物体到相机坐标变换的问题。

上述红框部分描述的是从物体的坐标(称为世界坐标)到相机坐标变换的过程,它是一种刚体运动,可以用平移、旋转来描述。
上图表示的是从世界坐标变换到相机坐标:$ P_c=R(P_w - C) $,写成矩阵形式
平移是容易理解的,我们先讨论更简单的情形,即假设世界坐标系和相机坐标系的原点重合,则变换只剩下旋转了。
旋转矩阵的元素也很容易确定。试想(U,V,W)=(1,0,0),而它在相机坐标系中的坐标是(X,Y,Z)=(a,b,c)(同一物理点的不同坐标)则有:
因此有:
由于该旋转是刚体运动,因此它是正交变换,满足$ R^{-1}=R^T $,所以有:
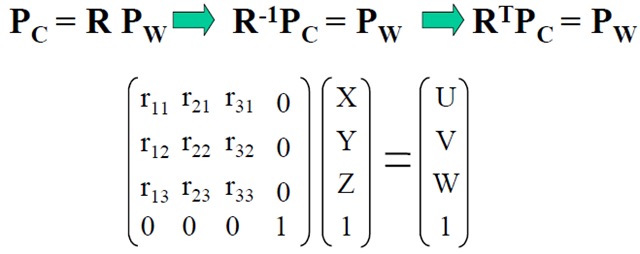
不难得出:
看一个例子:

由于物体的坐标到相机坐标的变换,相对于相机内部参数而言属于外部参数(External Parameters),往往写作R和T,即
总结

本小节讲述了如何将3D世界坐标系中的点变换到相机坐标系中,然后经透视投影,变成2D像平面上的点(x,y).
下一节:立体视觉基础3——内部参数描述

相关文章推荐
- 计算机视觉基础2——相机成像的几何描述
- 【转】计算机视觉基础2——相机成像的几何描述
- 计算机视觉基础2——相机成像的几何描述
- 计算机视觉基础2——相机成像的几何描述
- 计算机视觉基础2——相机成像的几何描述
- 计算机视觉基础-相机成像的几何描述
- 计算机视觉---相机成像的几何描述
- 计算机视觉中的对极几何及相机自检校
- 【转】计算机视觉基础3——内部参数描述
- 计算机视觉基础3——内部参数描述
- 计算机视觉基础3——内部参数描述
- 计算机视觉基础3——内部参数描述
- 计算机视觉:相机成像原理:世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的转换
- 计算机视觉基础3——内部参数描述
- 计算机视觉:相机成像原理:世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的转换
- 计算机视觉基础3——内部参数描述
- [置顶] SLAM基础技术点之基于计算机视觉求解相机姿态变化的方法汇总
- 计算机视觉:相机成像原理:世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的转换
- 计算机视觉:相机成像原理:世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的转换
- 图像处理与计算机视觉:基础,经典以及最近发展