驱动设备模型---sys文件系统
2011-12-07 13:41
537 查看
linux混混之牢骚:
同事小李要移民到美国,领导问他:“你对你的工资不满意吗?”小李说:“满意。”
“对你的住房不满意?”
“满意”
“那是上网环境不满意?”
“也满意”
“对医疗,孩子上学都不满意?”
“都满意!”
“既然你都满意为什么还要移民?”
“因为那里允许有不满意!”
linux version:2.6.39
什么是sys文件系统:
Sysfs文件系统是一个类似于proc文件系统的特殊文件系统,用于将系统中的设备组织成层次结构,并向用户模式程序提供详细的内核数据结构信息。其实,就是 在用户态可以通过对sys文件系统的访问,来看内核态的一些驱动或者设备等。
去/sys看一看,
localhost:/sys#ls
/sys/ block/ bus/ class/ devices/ firmware/ kernel/ module/ power/
Block目录:包含所有的块设备,进入到block目录下,会发现下面全是link文件,link到sys/device/目录下的一些设备。
Devices目录:包含系统所有的设备,并根据设备挂接的总线类型组织成层次结构
Bus目录:包含系统中所有的总线类型
Drivers目录:包括内核中所有已注册的设备驱动程序
Class目录:系统中的设备类型(如网卡设备,声卡设备等)。去class目录中看一下,随便进到一个文件夹下,会发现该文件夹下的文件其实是连接文件,link到/sys/device/.../../...下的一个设备文件。 可以说明,其实class目录并不会新建什么设备,只是将已经注册的设备,在class目录下重新归类,放在一起。
但是,你可能根本没有去关心过sysfs的挂载过程,她是这样被挂载的。
mount -t sysfs sysfs /sys
但是sys文件是根据什么依据来创建其内容呢?他的信息来源是什么呢?
下面来分析sys的信息来源。
Linus设备底层模型
Kobject
应该说每个Kobject结构都对应一个 目录。for example:/sys/bus/pci/drivers/serial/ 路径, serial这个目录就是由一个kobject 结构体 来表示的。由此可见,Kobject是用来表示 直接对应着一个 设备,或设备驱动 的目录。Kobject包含了 这个目录的一些信息,如:目录名,父目录,设备名称等等一些信息。当然,如果Kobject用来表示一个目录,那么他所包含的信息是差不多了,但是Kobject表示的目录是用来描述某一个设备/设备驱动的。所以仅仅Kobject这个结构体还不能完全的描述这个设备/设备驱动,再所以,Kobject这个结构体不会单独使用,一般都会包含在另一个结构体中,用网络上的话说就是包含在一个容器中。这个容器可以是:device结构体,device_drive结构体。现在层次就很明显了,device/device_drive来表示一个设备/设备驱动,当然包含了这个设备/设备驱动的信息,并且还包含了这个驱动所对应的目录的信息,Kobject结构。
当然device/device_drive在另外一层的东西了,后面再分析。我们在这里就先分析Kobject结构。
struct kobject {
const char *name; //目录的name
struct list_head entry; //Kobject插入到某个链表的指针。
struct kobject *parent; //父目录,刚才所述kobject所表示的是设备/设备驱动目录,但为什么他的父目录也用kobject来表示呢?后面讲解。
struct kset *kset; //kobject上上级目录可能是Kset,这个表示。 这个变量和parent有些相似的地方。 可以从kset_register函数中看出些端倪。
struct kobj_type *ktype;
struct sysfs_dirent *sd;
struct kref kref; //被引用的次数
unsigned int state_initialized:1;
unsigned int state_in_sysfs:1;
unsigned int state_add_uevent_sent:1;
unsigned int state_remove_uevent_sent:1;
unsigned int uevent_suppress:1;
};注意:在kenerl中,如kref,前面讲到的 page_reference变量。 都用来表示被引用。 所以 以后看变量的时候要注意看 ref或reference,来表示被引用。
相关函数
void kobject_init(struct kobject * kobj);kobject初始化函数。
int kobject_set_name(struct kobject *kobj, const char *format, ...);设置指定kobject的名称。
struct kobject *kobject_get(struct kobject *kobj);将kobj 对象的引用计数加1,同时返回该对象的指针。
void kobject_put(struct kobject * kobj); 将kobj对象的引用计数减1,如果引用计数降为0,则调用kobject release()释放该kobject对象。
int kobject_add(struct kobject * kobj);将kobj对象加入Linux设备层次。挂接该kobject对象到kset的list链中,增加父目录各级kobject的引用计数,在其parent指向的目录下创建文件节点,并启动该类型内核对象的hotplug函数。
int kobject_register(struct kobject * kobj);kobject注册函数。通过调用kobject init()初始化kobj,再调用kobject_add()完成该内核对象的注册。
void kobject_del(struct kobject * kobj);从Linux设备层次(hierarchy)中删除kobj对象。
void kobject_unregister(struct kobject * kobj);kobject注销函数。与kobject register()相反,它首先调用kobject del从设备层次中删除该对象,再调用kobject put()减少该对象的引用计数,如果引用计数降为0,则释放kobject对象。
kobject下的结构体描述:
struct kobj_type
{
void (*release)(struct kobject *);
struct sysfs_ops * sysfs_ops;
struct attribute ** default_attrs;
};
Kobj type数据结构包含三个域:一个release方法用于释放kobject占用的资源;一个sysfs ops指针指向sysfs操作表和一个sysfs文件系统缺省属性列表。
Sysfs操作表包括两个函数store()和show()。当用户态读取属性时,show()函数被调用,该函数编码指定属性值存入buffer中返回给用户态;而store()函数用于存储用户态传入的属性值。
attribute struct attribute
{
char * name;
struct module * owner;
mode_t mode;
};
attribute属性。它以文件的形式输出到sysfs的目录当中。在kobject对应的目录下面。文件 名就是name。文件读写的方法对应于kobj type中的sysfs ops。
Kset
像刚才所说,每个Kobject结构都对应一个目录。for example:/sys/bus/pci/drivers/serial/ 路径, /serial/这个目录由一个kobject 结构体 来表示的。但是/serial/的上一级目录/drivers/如何表示呢?那么就出现了Kset这个结构体。
/**
* struct kset - a set of kobjects of a specific type, belonging to a specific subsystem.
*
* A kset defines a group of kobjects. They can be individually
* different "types" but overall these kobjects all want to be grouped
* together and operated on in the same manner. ksets are used to
* define the attribute callbacks and other common events that happen to
* a kobject.
*
* @list: the list of all kobjects for this kset
* @list_lock: a lock for iterating over the kobjects
* @kobj: the embedded kobject for this kset (recursion, isn't it fun...)
* @uevent_ops: the set of uevent operations for this kset. These are
* called whenever a kobject has something happen to it so that the kset
* can add new environment variables, or filter out the uevents if so
* desired.
*/
struct kset {
struct list_head list; //由于Kset下会有很多个Kobject的目录,所以使用一个list将他们全部link起来。
spinlock_t list_lock; //锁机制
struct kobject kobj; //Kest本质上来说,也是个目录,所以他也使用了Kobject,来表示他自己的这个目录
struct kset_uevent_ops *uevent_ops; //由于Kset是将很多的有公共特性的Kobject集中到一起,所以这个变量操作,在他的目录下的一些共性操作。
};subsystem
在以前的版本中,还有subsystem结构,但 是在现在的版本中都已经去掉了,用Kset来代替struct subsystem {
struct kset kset;
struct rw semaphore rwsem;
};由上面声明可以看出,完全可以让Kset来代替subsystem结构。
总结:
1,在sys下,表示一个目录使用的结构体是 Kobject,但是在linux的内核中,有硬件的设备 和 软件的驱动,在sys下都需要用一个目录来表示。 单纯的一个Kobject结构无法表示完全,增加了容器,来封装Kobject。 即下面要将的:device和drive_device结构。2, 最底层驱动目录的上一层目录,从sys角度上来说,他依然是个目录,所以他也有Kobjec这个变量。但是从他的意义上讲,他将 一些有公共特性Kobjec 的 device/driver_device结构组织到了一起,所以除了有Kobject这个变量外,他又添加了一些变量,组成了Kset这个结构来表示这一级的目录。但是仅仅是用Kset来表示了这一级的目录,和1,一样,仅仅表示一个目录是不够的,在linux内核中,需要他在软件上有个映射。所以,也将Kset进行了封装,形成了
bus_type这个结构。
3, 从1 ,2,的解释可以看出,应为kobject在Kset的目录下,那么 device/device_driver 就在 bus_type结构下。所以,linux驱动模型中,驱动和设备都是挂在总线下面的。
4, 如上所述,Kset的意义:表示一个目录(由结构体下的Kobject来完成),并且这个目录下的所有目录有共同的特性(所以说,Kset表示的目录下,不一定非要是Kobject街头的,也可以是Kset结构的。即:Kset嵌套Kset)。所以使用Kset来代替了以前的 subsystem结构。
贴两张图来形象了解一下:
1, Kset和Kobject的连接图(from linux那些事之我是sys)
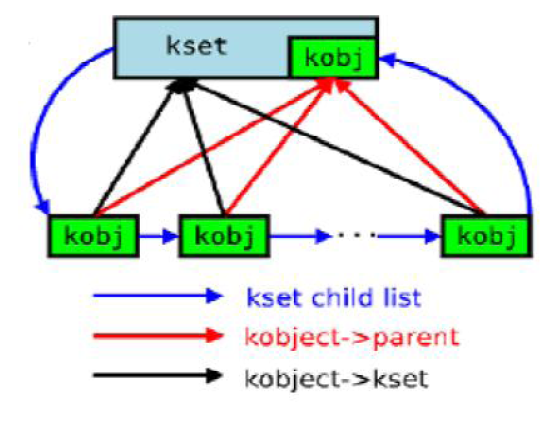
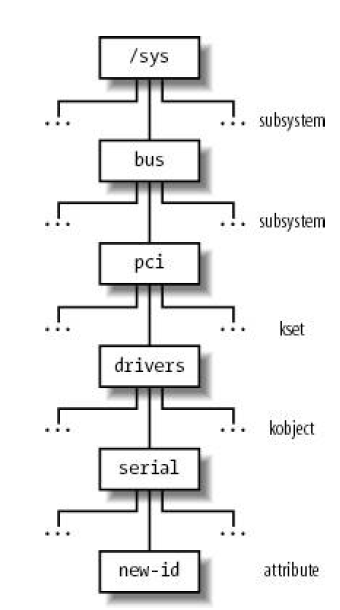
2,整个sys目录的结构体表示图:(from ULK--当然,在这里subsystem结构要换成Kset了,但我个人认为,以前的subsystem结构上会更清晰,不是吗?)
(但这边有个问题。。。Kobject通过下面的attribute来建立目录下的文件,但我看到目录下有好几个文件,难道是根据一个attribute来建立好几个文件?疑惑ing,好像attribute是个指针,还能当数组首地址?bus_add_attrs函数中如是说)
设备模型的上层容器
刚才讲了Kset和Kobject结构体,都是用来表示 sys下的目录结构的。下面来讲驱动中封装这些结构的容器。总线bus
bus_type结构: 刚才上面已经将的够多的了,闲话少说,直接上code。struct bus_type {
const char *name; //总线的名称,这个名字理论上并不是sys/bus/下的那些目录的目录名。那些目录的目录名应该是在下面变量 subsys_private p.sbusys的name变量中。但是往往那个name是由这个name赋值的,所以就一样的。但这里要明白的是(还是上面的老生常谈),表示目录是由Kset.Kobject这个东西来表示的。
struct bus_attribute *bus_attrs; //根据后面的bus_add_attrs函数分析,这些个属性可能是数组
struct device_attribute *dev_attrs;
struct driver_attribute *drv_attrs; //bus device driver的属性,一些操作导入导出的属性,等后面再分析。
int (*match)(struct device *dev, struct device_driver *drv);
int (*uevent)(struct device *dev, struct kobj_uevent_env *env);
int (*probe)(struct device *dev);
int (*remove)(struct device *dev);
void (*shutdown)(struct device *dev);
int (*suspend)(struct device *dev, pm_message_t state);
int (*resume)(struct device *dev); //总线的操作
const struct dev_pm_ops *pm; //power manage 的operations
struct subsys_private *p; 见下面:
};struct subsys_private { //为了保持和上面的代码的连贯,我将这个结构体的注释部分放到下面了。注释还是比较清楚的,不解释
struct kset subsys;
struct kset *devices_kset;
struct kset *drivers_kset;
struct klist klist_devices;
struct klist klist_drivers;
struct blocking_notifier_head bus_notifier;
unsigned int drivers_autoprobe:1;
struct bus_type *bus;
struct list_head class_interfaces;
struct kset glue_dirs;
struct mutex class_mutex;
struct class *class;
};
/**
* struct subsys_private - structure to hold the private to the driver core portions of the bus_type/class structure.
*
* @subsys - the struct kset that defines this subsystem
* @devices_kset - the list of devices associated
*
* @drivers_kset - the list of drivers associated
* @klist_devices - the klist to iterate over the @devices_kset
* @klist_drivers - the klist to iterate over the @drivers_kset
* @bus_notifier - the bus notifier list for anything that cares about things
* on this bus.
* @bus - pointer back to the struct bus_type that this structure is associated
* with.
*
* @class_interfaces - list of class_interfaces associated
* @glue_dirs - "glue" directory to put in-between the parent device to
* avoid namespace conflicts
* @class_mutex - mutex to protect the children, devices, and interfaces lists.
* @class - pointer back to the struct class that this structure is associated
* with.
*
* This structure is the one that is the actual kobject allowing struct
* bus_type/class to be statically allocated safely. Nothing outside of the
* driver core should ever touch these fields.
*/这个结构体用来描述比如:/sys/bus/pci pci总线,/sys/bus/platform platform总线等。
另外:从这个结构体分析下来,整个bus的目录结构都很清楚了eg:
1,可以找到总线下的设备目录: bus_type bus ---> subsys_private p---->Kest devices_kset
2,可以找到总线下的设备驱动目录: bus_type bus ---> subsys_private p---->Kest driver_kset
另外,找到的也只是目录,因为找到的仅仅是Kset结构。
于此看来,这个subsys_private p这个变量挺有用的。 哥预言,此子日后必成大器。当然,条件是 日后!!哥邪恶的笑了。。。。。
设备device
首先明白,device这个结构并不是直接挂在bus下的,可以到/sys/bus/platform/device下随便看一下,发现里面的都是link文件,link到/sys/device/下。所以真正的device结构体的在/sys/device下的。struct device {
struct device *parent; //设备的父设备指针,那么就是说device的目录也是可以嵌套的?到/sys/device/platform/serial8250目录下看看,竟然还存在着 tty/ 目录,是不是这样嵌套的呢??天知道。。。。。
struct device_private *p;
struct kobject kobj; //这个就是说了好久的 Kobject
const char *init_name; /* initial name of the device */
struct device_type *type;
struct mutex mutex; /* mutex to synchronize calls to
* its driver.
*/
struct bus_type *bus; /* type of bus device is on *///他所在的总线的类型
struct device_driver *driver; /* which driver has allocated this //支持的驱动
device */
void *platform_data; /* Platform specific data, device
core doesn't touch it */
struct dev_pm_info power;
struct dev_power_domain *pwr_domain;
#ifdef CONFIG_NUMA
int numa_node; /* NUMA node this device is close to */
#endif
u64 *dma_mask; /* dma mask (if dma'able device) */
u64 coherent_dma_mask;/* Like dma_mask, but for
alloc_coherent mappings as
not all hardware supports
64 bit addresses for consistent
allocations such descriptors. */
struct device_dma_parameters *dma_parms;
struct list_head dma_pools; /* dma pools (if dma'ble) */
struct dma_coherent_mem *dma_mem; /* internal for coherent mem
override */
/* arch specific additions */
struct dev_archdata archdata;
struct device_node *of_node; /* associated device tree node */
dev_t devt; /* dev_t, creates the sysfs "dev" */
spinlock_t devres_lock;
struct list_head devres_head;
struct klist_node knode_class;
struct class *class;
const struct attribute_group **groups; /* optional groups */
void (*release)(struct device *dev);
};
设备driver
struct device_driver {
const char *name;
struct bus_type *bus;
struct module *owner;
const char *mod_name; /* used for built-in modules */
bool suppress_bind_attrs; /* disables bind/unbind via sysfs */
const struct of_device_id *of_match_table;
int (*probe) (struct device *dev);
int (*remove) (struct device *dev);
void (*shutdown) (struct device *dev);
int (*suspend) (struct device *dev, pm_message_t state);
int (*resume) (struct device *dev);
const struct attribute_group **groups;
const struct dev_pm_ops *pm;
struct driver_private *p;
};无语。。。。。。。。。。。。。
终于经过了一大段偷工减料之后,能开始分析代码了
设备模型的注册等操作:
总线的操作:
用户可以自己注册一个总线,然后将自己喜欢的设备和驱动挂载到下面。但是linux 2.6中,有个默认的总线,platform总线。我们就分析一下这个总线。小记:随手在Source insight里敲了个 platform_bus_init,结果的真的有这个函数,再看一下谁调用他了吧? 竟然是drive_init。啊。。终于找到组织了,在start_kernel的最后一步后调用这个drive_init了。
int __init platform_bus_init(void)
{
int error;
early_platform_cleanup(); //清除platform总线上的设备?不确定,,,好像就是将early_platform_device_list这个里的内容清空。
error = device_register(&platform_bus); //设备注册。哦,linux将platform也当成了一个设备,他在/sys/device目录下。当然,以后会在platform这个设备下再建立其他的设备,回顾刚才介绍device结构体时候有个parent变量,应该就是用在这里的。具体device_register这个函数,后面再介绍
if (error)
return error;
error = bus_register(&platform_bus_type); //总线的注册。
if (error)
device_unregister(&platform_bus);
return error;
}/**
* bus_register - register a bus with the system.
* @bus: bus.
*
* Once we have that, we registered the bus with the kobject
* infrastructure, then register the children subsystems it has:
* the devices and drivers that belong to the bus.
*/
int bus_register(struct bus_type *bus)
{
int retval;
struct subsys_private *priv;
priv = kzalloc(sizeof(struct subsys_private), GFP_KERNEL);
if (!priv)
return -ENOMEM;
priv->bus = bus;
bus->p = priv;
BLOCKING_INIT_NOTIFIER_HEAD(&priv->bus_notifier); //bus_notifier就是个读写信号量,和RCU机制,这里进行初始化
retval = kobject_set_name(&priv->subsys.kobj, "%s", bus->name); //设置name,这个name会显示在sys/bus/下
if (retval)
goto out;
priv->subsys.kobj.kset = bus_kset;
priv->subsys.kobj.ktype = &bus_ktype;
priv->drivers_autoprobe = 1;
retval = kset_register(&priv->subsys); //这个应该是注册bus,但看函数名是ket_register,所以可能会根据刚才对subsys.kobj.kset的赋值来判定是bus,并注册。后面分析。
if (retval)
goto out;
retval = bus_create_file(bus, &bus_attr_uevent); //在对应的bus目录下,根据attribute来创建一个文件
if (retval)
goto bus_uevent_fail;
priv->devices_kset = kset_create_and_add("devices", NULL, //这就函数应该是创建目录,所以在每个bus下会有 device和driver 两个目录。
&priv->subsys.kobj);
if (!priv->devices_kset) {
retval = -ENOMEM;
goto bus_devices_fail;
}
priv->drivers_kset = kset_create_and_add("drivers", NULL,
&priv->subsys.kobj);
if (!priv->drivers_kset) {
retval = -ENOMEM;
goto bus_drivers_fail;
}
klist_init(&priv->klist_devices, klist_devices_get, klist_devices_put);
klist_init(&priv->klist_drivers, NULL, NULL); //klist还是没搞明白怎么用,以后再说吧
retval = add_probe_files(bus); //这个也是在对应的总线目录下,建立bus_attr_drivers_probe 和 bus_attr_drivers_autoprobe文件。应该是probe的时候使用。
if (retval)
goto bus_probe_files_fail;
retval = bus_add_attrs(bus); //循环将所有的bus的属性都建立成一个文件。
if (retval)
goto bus_attrs_fail;
pr_debug("bus: '%s': registered\n", bus->name);
return 0;
bus_attrs_fail:
remove_probe_files(bus);
bus_probe_files_fail:
kset_unregister(bus->p->drivers_kset);
bus_drivers_fail:
kset_unregister(bus->p->devices_kset);
bus_devices_fail:
bus_remove_file(bus, &bus_attr_uevent);
bus_uevent_fail:
kset_unregister(&bus->p->subsys);
out:
kfree(bus->p);
bus->p = NULL;
return retval;
}bus_register-->kset_register
/**
* kset_register - initialize and add a kset.
* @k: kset.
*/
int kset_register(struct kset *k)
{
int err;
if (!k)
return -EINVAL;
kset_init(k); //初始化,没什么东西
err = kobject_add_internal(&k->kobj); //下面分析
if (err)
return err;
kobject_uevent(&k->kobj, KOBJ_ADD); //通过这个函数的注释可知,向usrspace发送信号。
return 0;
}static int kobject_add_internal(struct kobject *kobj)
{
int error = 0;
struct kobject *parent;
if (!kobj)
return -ENOENT;
if (!kobj->name || !kobj->name[0]) {
WARN(1, "kobject: (%p): attempted to be registered with empty "
"name!\n", kobj);
return -EINVAL;
}
parent = kobject_get(kobj->parent);
/* join kset if set, use it as parent if we do not already have one */
if (kobj->kset) {
if (!parent)
parent = kobject_get(&kobj->kset->kobj); //get kobject->kset, 判断与parent对比。
obj_kset_join(kobj); //这个函数,是将kobject的entry这个变量 添加到 他的 上一级的kset结构的 list中。
kobj->parent = parent;
}
pr_debug("kobject: '%s' (%p): %s: parent: '%s', set: '%s'\n",
kobject_name(kobj), kobj, __func__,
parent ? kobject_name(parent) : "<NULL>",
kobj->kset ? kobject_name(&kobj->kset->kobj) : "<NULL>");
error = create_dir(kobj); //创建目录。比如:/sys/bus 下的 platform, pci等目录。
if (error) {
kobj_kset_leave(kobj);
kobject_put(parent);
kobj->parent = NULL;
/* be noisy on error issues */
if (error == -EEXIST)
printk(KERN_ERR "%s failed for %s with "
"-EEXIST, don't try to register things with "
"the same name in the same directory.\n",
__func__, kobject_name(kobj));
else
printk(KERN_ERR "%s failed for %s (%d)\n",
__func__, kobject_name(kobj), error);
dump_stack();
} else
kobj->state_in_sysfs = 1;
return error;
}到此,bus_register解释完成。
/**
* device_register - register a device with the system.
* @dev: pointer to the device structure
*
* This happens in two clean steps - initialize the device
* and add it to the system. The two steps can be called
* separately, but this is the easiest and most common.
* I.e. you should only call the two helpers separately if
* have a clearly defined need to use and refcount the device
* before it is added to the hierarchy.
*
* NOTE: _Never_ directly free @dev after calling this function, even
* if it returned an error! Always use put_device() to give up the
* reference initialized in this function instead.
*/
int device_register(struct device *dev)
{
device_initialize(dev);
return device_add(dev);
}/**
* device_initialize - init device structure.
* @dev: device.
*
* This prepares the device for use by other layers by initializing
* its fields.
* It is the first half of device_register(), if called by
* that function, though it can also be called separately, so one
* may use @dev's fields. In particular, get_device()/put_device()
* may be used for reference counting of @dev after calling this
* function.
*
* NOTE: Use put_device() to give up your reference instead of freeing
* @dev directly once you have called this function.
*/
void device_initialize(struct device *dev)
{
dev->kobj.kset = devices_kset;
kobject_init(&dev->kobj, &device_ktype);
INIT_LIST_HEAD(&dev->dma_pools);
mutex_init(&dev->mutex);
lockdep_set_novalidate_class(&dev->mutex);
spin_lock_init(&dev->devres_lock);
INIT_LIST_HEAD(&dev->devres_head);
device_pm_init(dev);
set_dev_node(dev, -1);
}dev_initialize,不解释。
这里有个疑问:在bus_register的时候,有条语句:priv->subsys.kobj.kset = bus_kset;。在dev_initialize的时候也有条dev->kobj.kset = devices_kset;语句。 刚才以为是上级目录的kset结构。但是如此看来好像不是很对,因为dev的上级目录是不定的,可能在/sys/device/platform下,也可能在其他。但是都赋值成devices_kset显然不对。
那么有可能在一个标志。所有的bus的subsys.kobj.kset 这个变量都是bus_kset, 所有dev->kobj.kset的变量都是devices_kset。具体为什么?
天空中深沉的传来一句话:1+1=几?
我说:2
啪,一道雷劈死我了。答曰:你知道的太多了。 为了留条命,就不解释了。
/**
* device_add - add device to device hierarchy.
* @dev: device.
*
* This is part 2 of device_register(), though may be called
* separately _iff_ device_initialize() has been called separately.
*
* This adds @dev to the kobject hierarchy via kobject_add(), adds it
* to the global and sibling lists for the device, then
* adds it to the other relevant subsystems of the driver model.
*
* NOTE: _Never_ directly free @dev after calling this function, even
* if it returned an error! Always use put_device() to give up your
* reference instead.
*/
int device_add(struct device *dev)
{
struct device *parent = NULL;
struct class_interface *class_intf;
int error = -EINVAL;
dev = get_device(dev);
if (!dev)
goto done;
if (!dev->p) {
error = device_private_init(dev);
if (error)
goto done;
}
/*
* for statically allocated devices, which should all be converted
* some day, we need to initialize the name. We prevent reading back
* the name, and force the use of dev_name()
*/
if (dev->init_name) {
dev_set_name(dev, "%s", dev->init_name);
dev->init_name = NULL;
}
if (!dev_name(dev)) {
error = -EINVAL;
goto name_error;
}
pr_debug("device: '%s': %s\n", dev_name(dev), __func__);
parent = get_device(dev->parent);
setup_parent(dev, parent);
/* use parent numa_node */
if (parent)
set_dev_node(dev, dev_to_node(parent));
//以上是对device进行初始化,包括name,private,parent……
/* first, register with generic layer. */
/* we require the name to be set before, and pass NULL */
error = kobject_add(&dev->kobj, dev->kobj.parent, NULL); //device添加,根据他的parent等,当然还会根据他的attribute built一些文件。
if (error)
goto Error;
/* notify platform of device entry */
if (platform_notify)
platform_notify(dev);
error = device_create_file(dev, &uevent_attr); //built attr file
if (error)
goto attrError;
if (MAJOR(dev->devt)) {
error = device_create_file(dev, &devt_attr);
if (error)
goto ueventattrError;
error = device_create_sys_dev_entry(dev);
if (error)
goto devtattrError;
devtmpfs_create_node(dev);
}
error = device_add_class_symlinks(dev); //在其他文件夹 建立link文件,这就是为什么在class目录下也能看到device的目录和文件了
if (error)
goto SymlinkError;
error = device_add_attrs(dev);
if (error)
goto AttrsError;
error = bus_add_device(dev); //在bus目录下 建立link文件,所以在/sys/bus/platform/device下回看到n多个link文件。
if (error)
goto BusError;
error = dpm_sysfs_add(dev);
if (error)
goto DPMError;
device_pm_add(dev);
/* Notify clients of device addition. This call must come
* after dpm_sysf_add() and before kobject_uevent().
*/
if (dev->bus)
blocking_notifier_call_chain(&dev->bus->p->bus_notifier,
BUS_NOTIFY_ADD_DEVICE, dev);
kobject_uevent(&dev->kobj, KOBJ_ADD);
bus_probe_device(dev); //进行probe,看有没和device相对应的driver文件。
if (parent)
klist_add_tail(&dev->p->knode_parent,
&parent->p->klist_children);
if (dev->class) {
mutex_lock(&dev->class->p->class_mutex);
/* tie the class to the device */
klist_add_tail(&dev->knode_class,
&dev->class->p->klist_devices);
/* notify any interfaces that the device is here */
list_for_each_entry(class_intf,
&dev->class->p->class_interfaces, node)
if (class_intf->add_dev)
class_intf->add_dev(dev, class_intf);
mutex_unlock(&dev->class->p->class_mutex);
}
done:
put_device(dev);
return error;
DPMError:
bus_remove_device(dev);
BusError:
device_remove_attrs(dev);
AttrsError:
device_remove_class_symlinks(dev);
SymlinkError:
if (MAJOR(dev->devt))
devtmpfs_delete_node(dev);
if (MAJOR(dev->devt))
device_remove_sys_dev_entry(dev);
devtattrError:
if (MAJOR(dev->devt))
device_remove_file(dev, &devt_attr);
ueventattrError:
device_remove_file(dev, &uevent_attr);
attrError:
kobject_uevent(&dev->kobj, KOBJ_REMOVE);
kobject_del(&dev->kobj);
Error:
cleanup_device_parent(dev);
if (parent)
put_device(parent);
name_error:
kfree(dev->p);
dev->p = NULL;
goto done;
}当然还有 drive_register的函数,其实和device_register差不多,另外,driver_register也会在最后进行probe,看有没有相应的设备。driver_register会先check这个drvier所在的bus上有没有probe函数,如果有就运行这个函数进行probe,如果没有,就运行自己的probe进行probe,这就是我们在驱动中经常看到的probe函数。
所以,在驱动中,先运行drive_register和先运行device_register都是一样的。
喝了,累了,喝红牛也不管用了,怎么办?直接点击 发表文章的 按钮吧。


相关文章推荐
- 驱动设备模型---sys文件系统
- Linux 设备驱动模型,I2C驱动,sys文件系统(1)
- 驱动设备模型---sys文件系统之最后总结
- Linux设备模型――设备驱动模型和sysfs文件系统解读
- Linux设备模型——设备驱动模型和sysfs文件系统解读
- Linux驱动模型 —— kobject,kset ,sys文件系统
- 设备驱动,字符设备驱动、(总线)设备驱动模型、sysfs文件系统、平台设备驱动
- linux设备模型与sys文件系统
- Linux设备模型——设备驱动模型和sysfs文件系统解读
- 20150225 IMX257 设备驱动模型之sysfs文件系统知识点整合(二)
- Linux 文件系统与设备驱动
- linux文件系统的系统分析--(十三)sysfs和设备模型--Device
- 嵌入式系统通用驱动程序接口及其实现-I2C主机设备驱动(视频教学时的同步输入文件)
- Linux 字符设备驱动开发基础(六)—— VFS 虚拟文件系统解析
- sysfs文件系统与Linux设备模型
- linux驱动学习--第十天:第五章 Linux 文件系统与设备文件系统(四) 之 设备文件系统 devfs 和 udev
- Sysfs文件系统与Linux设备模型
- 关于设备栈,IO栈,IO_STACK_LOCATION----文件系统过滤驱动学习收获
- win10系统腾讯驱动文件tessafe.sys导致蓝屏的修复方法
- UBI 文件系统移植 sys 设备信息【转】