linux设备驱动编写_tasklet机制
2011-04-12 18:01
316 查看
璞石小坊
在编写设备驱动时,
tasklet
机制是一种比较常见的机制,通常用于减少中断处理的时间,将本应该是在中断服务程序中完成的任务转化成软中断完成。
为了最大程度的避免中断处理时间过长而导致中断丢失,有时候我们需要把一些在中断处理中不是非常紧急的任务放在后面执行,而让中断处理程序尽快返回。在老版本的
linux
中通常将中断处理分为
top half handler
、
bottom half handler
。利用
top half handler
处理中断必须处理的任务,而
bottom half handler
处理不是太紧急的任务。
但是
linux2.6
以后的
linux
采取了另外一种机制,就是软中断来代替
bottom half handler
的处理。而
tasklet
机制正是利用软中断来完成对驱动
bottom half
的处理。
Linux2.6
中软中断通常只有固定的几种:
HI_SOFTIRQ(
高优先级的
tasklet
,一种特殊的
tasklet)
、
TIMER_SOFTIRQ
(定时器)、
NET_TX_SOFTIRQ
(网口发送)、
NET_RX_SOFTIRQ
(网口接收)
、
BLOCK_SOFTIRQ
(块设备)、
TASKLET_SOFTIRQ
(普通
tasklet
)。当然也可以通过直接修改内核自己加入自己的软中断,但是一般来说这是不合理的,软中断的优先级比较高,如果不是在内核处理频繁的任务不建议使用。通常驱动用户使用
tasklet
足够了。
软中断和
tasklet
的关系如下图:

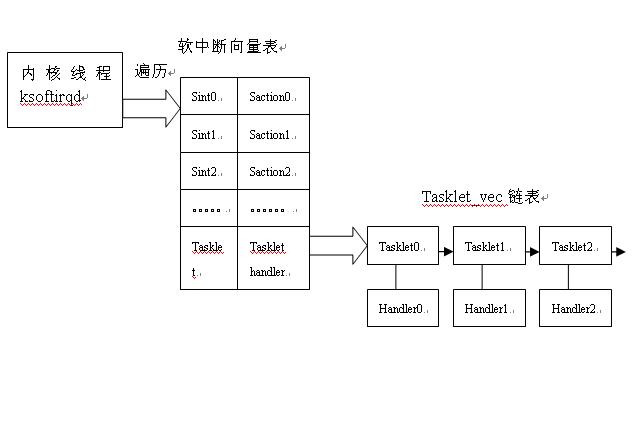
上图可以看出,
ksoftirqd
是一个后台运行的内核线程,它会周期的遍历软中断的向量列表,如果发现哪个软中断向量被挂起了(
pend
),就执行对应的处理函数,对于
tasklet
来说,此处理函数就是
tasklet_action
,这个处理函数在系统启动时初始化软中断的就挂接了。
Tasklet_action
函数,遍历一个全局的
tasklet_vec
链表(此链表对于
SMP
系统是每个
CPU
都有一个),此链表中的元素为
tasklet_struct
。此结构如下
:
struct tasklet_struct
{
struct tasklet_struct *next;
unsigned long state;
atomic_t count;
void (*func)(unsigned long);
unsigned long data;
};
每个结构一个函数指针,指向你自己定义的函数。当我们要使用
tasklet
,首先新定义一个
tasklet_struct
结构,并初始化好要执行函数指针,然后将它挂接到
task_vec
链表中,并发一个软中断就可以等着被执行了。
原理大概如此,对于
linux
驱动的作者其实不需要关心这些,关键是我们如何去使用
tasklet
这种机制。
Linux
中提供了如下接口:
DECLARE_TASKLET(name,function,data)
:此接口初始化一个
tasklet
;其中
name
是
tasklet
的名字,
function
是执行
tasklet
的函数;
data
是
unsigned long
类型的
function
参数。
static inline void tasklet_schedule(struct tasklet_struct *t)
:此接口将定义后的
tasklet
挂接到
cpu
的
tasklet_vec
链表,具体是哪个
cpu
的
tasklet_vec
链表,是根据当前线程是运行在哪个
cpu
来决定的。此函数不仅会挂接
tasklet
,而且会起一个软
tasklet
的软中断
,
既把
tasklet
对应的中断向量挂起
(pend)
。
两个工作完成后,基本上可以了,
tasklet
机制并不复杂,很容易的使程序尽快的响应中断,避免造成中断丢失。
linux设备驱动编写_tasklet机制
在编写设备驱动时,tasklet
机制是一种比较常见的机制,通常用于减少中断处理的时间,将本应该是在中断服务程序中完成的任务转化成软中断完成。
为了最大程度的避免中断处理时间过长而导致中断丢失,有时候我们需要把一些在中断处理中不是非常紧急的任务放在后面执行,而让中断处理程序尽快返回。在老版本的
linux
中通常将中断处理分为
top half handler
、
bottom half handler
。利用
top half handler
处理中断必须处理的任务,而
bottom half handler
处理不是太紧急的任务。
但是
linux2.6
以后的
linux
采取了另外一种机制,就是软中断来代替
bottom half handler
的处理。而
tasklet
机制正是利用软中断来完成对驱动
bottom half
的处理。
Linux2.6
中软中断通常只有固定的几种:
HI_SOFTIRQ(
高优先级的
tasklet
,一种特殊的
tasklet)
、
TIMER_SOFTIRQ
(定时器)、
NET_TX_SOFTIRQ
(网口发送)、
NET_RX_SOFTIRQ
(网口接收)
、
BLOCK_SOFTIRQ
(块设备)、
TASKLET_SOFTIRQ
(普通
tasklet
)。当然也可以通过直接修改内核自己加入自己的软中断,但是一般来说这是不合理的,软中断的优先级比较高,如果不是在内核处理频繁的任务不建议使用。通常驱动用户使用
tasklet
足够了。
软中断和
tasklet
的关系如下图:
上图可以看出,
ksoftirqd
是一个后台运行的内核线程,它会周期的遍历软中断的向量列表,如果发现哪个软中断向量被挂起了(
pend
),就执行对应的处理函数,对于
tasklet
来说,此处理函数就是
tasklet_action
,这个处理函数在系统启动时初始化软中断的就挂接了。
Tasklet_action
函数,遍历一个全局的
tasklet_vec
链表(此链表对于
SMP
系统是每个
CPU
都有一个),此链表中的元素为
tasklet_struct
。此结构如下
:
struct tasklet_struct
{
struct tasklet_struct *next;
unsigned long state;
atomic_t count;
void (*func)(unsigned long);
unsigned long data;
};
每个结构一个函数指针,指向你自己定义的函数。当我们要使用
tasklet
,首先新定义一个
tasklet_struct
结构,并初始化好要执行函数指针,然后将它挂接到
task_vec
链表中,并发一个软中断就可以等着被执行了。
原理大概如此,对于
linux
驱动的作者其实不需要关心这些,关键是我们如何去使用
tasklet
这种机制。
Linux
中提供了如下接口:
DECLARE_TASKLET(name,function,data)
:此接口初始化一个
tasklet
;其中
name
是
tasklet
的名字,
function
是执行
tasklet
的函数;
data
是
unsigned long
类型的
function
参数。
static inline void tasklet_schedule(struct tasklet_struct *t)
:此接口将定义后的
tasklet
挂接到
cpu
的
tasklet_vec
链表,具体是哪个
cpu
的
tasklet_vec
链表,是根据当前线程是运行在哪个
cpu
来决定的。此函数不仅会挂接
tasklet
,而且会起一个软
tasklet
的软中断
,
既把
tasklet
对应的中断向量挂起
(pend)
。
两个工作完成后,基本上可以了,
tasklet
机制并不复杂,很容易的使程序尽快的响应中断,避免造成中断丢失。

相关文章推荐
- 编写Linux网卡设备驱动(下)
- Linux-2.6.32 下 块设备驱动的编写 与 相关问题解决
- Linux 字符设备驱动开发基础(一)—— 编写简单 LED 设备驱动
- 编写LED混杂设备驱动:静态映射,如何用Linux内核里的gpio_request(),gpio_set_value()等函数,ioctl函数
- linux驱动编写32位与64位设备注意事项
- 利用linux 内核所提供的input子系统编写字符设备驱动的步骤
- 【转】Linux I2C设备驱动编写(二)
- 嵌入式Linux设备驱动编写原理
- Linux驱动编写(块设备驱动代码)
- 编写Linux网络设备驱动(上)
- 编写Linux网络设备驱动(上)
- Linux 字符设备驱动开发基础(二)—— 编写简单 PWM 设备驱动
- Linux字符设备驱动编写流程
- Linux I2C设备驱动编写(一)
- linux 下IIC设备驱动(old style)编写
- Linux I2C设备驱动编写(一)
- 编写Linux设备驱动时内核版本号的判断
- 【转】Linux I2C设备驱动编写(三)-实例分析AM3359
- Linux I2C设备驱动编写(一)【转】
- Linux i2c设备驱动编写(一)