点云数据的三维几何体表面重建
2005-10-21 16:17
1126 查看
近段时间研究点云数据的三维几何体表面重建,参考了一些资料,实现了对密集点云进行表面重建的算法:
原始图形是在3dmax中用一个球切除另外一个球体,然后写插件把顶点导出成txt文件(部分数据):
3182
0.142015 -1.257954 1.000000
0.142015 -1.179495 0.996917
0.135859 -1.179737 0.996917
0.129741 -1.180461 0.996917
0.123699 -1.181663 0.996917
0.117769 -1.183335 0.996917
0.111990 -1.185468 0.996917
0.063797 -1.264110 0.996917
0.064522 -1.270228 0.996917
0.065723 -1.276270 0.996917
0.067396 -1.282200 0.996917
......
3128表示有3128个点。
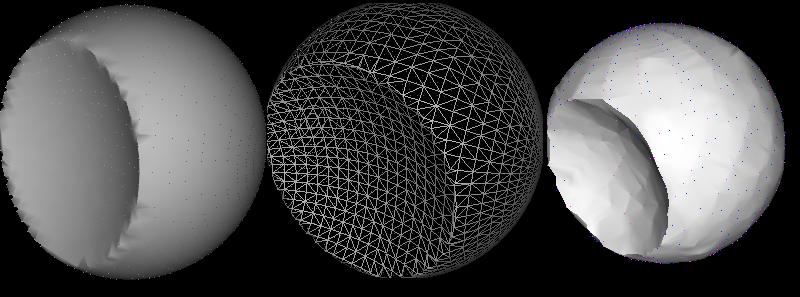
左图是我实现的表面重建结果,光源在视点位置,使用顶点的法向量进行光照运算;中图是以线框模式显示的结果,
进行了背面剔除;右图是VTK重建的结果(另外的重建算法)。
重建过程很快,在0.5s以内,如果进行优化,速度还可以提高。
原始图形是在3dmax中用一个球切除另外一个球体,然后写插件把顶点导出成txt文件(部分数据):
3182
0.142015 -1.257954 1.000000
0.142015 -1.179495 0.996917
0.135859 -1.179737 0.996917
0.129741 -1.180461 0.996917
0.123699 -1.181663 0.996917
0.117769 -1.183335 0.996917
0.111990 -1.185468 0.996917
0.063797 -1.264110 0.996917
0.064522 -1.270228 0.996917
0.065723 -1.276270 0.996917
0.067396 -1.282200 0.996917
......
3128表示有3128个点。
左图是我实现的表面重建结果,光源在视点位置,使用顶点的法向量进行光照运算;中图是以线框模式显示的结果,
进行了背面剔除;右图是VTK重建的结果(另外的重建算法)。
重建过程很快,在0.5s以内,如果进行优化,速度还可以提高。

相关文章推荐
- VTK修炼之道56:图形基本操作进阶_表面重建技术(三维点云曲面重建)
- 三维表面重建robust algorithm for surface reconstruction from 3D point cloud
- Matlab数据的可视化 -- 三维表面图
- 一天建好罗马城: 计算机视觉三维重建项目数据集锦
- 基于图像的三维重建与基于三维点云数据的曲面拟合
- CT图像的三维表面重建
- ArcEngine下SceneControl叠加影像数据(构建三维地形)
- Csimsoft.Bolt.v1.0.0.X64 螺栓设计 + CEETRON.GLView.Inova.v10.0.0.Win32 64 linux 数据三维可视化工具
- OpenGL OpenCV根据视差图重建三维信息
- python matplotlib模块——绘制三维图形、三维数据散点图
- 图形处理(十三)基于可变形模板的三维人脸重建-学习笔记
- MS SQL2005 数据索引重建(Index Defragment)脚本
- 三维重建学习(三)相机的标定(下)
- 转kidwei 最简单但是却最有用的vtk三维重建代码
- 双目测距与三维重建的OpenCV实现问题集锦(一)双目定标与双目校正
- 几何体表面切线计算方法
- 基于matlab读取nii体数据并进行表面绘制,计算表面积
- 多视角立体影像匹配三维重建---- visualSFM的使用方法
- 双目测距与三维重建的OpenCV实现问题集锦(三)立体匹配与视差计算
- [OpenCV] 摄像机标定 + 三维重建